TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025031651
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2024140076
出願日
2024-08-21
発明の名称
消費される直流電流の制御を可能にする、モータの設定トルクの決定方法
出願人
ジェイテクト ユーロップ
代理人
弁理士法人前田特許事務所
主分類
H02P
21/14 20160101AFI20250228BHJP(電力の発電,変換,配電)
要約
【課題】本発明は、モータの設定トルクを表すパラメータを求めて、消費される直流電流の抑制を確実に順守することができるようにする。
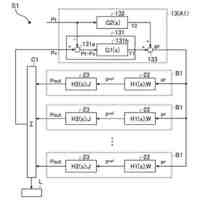
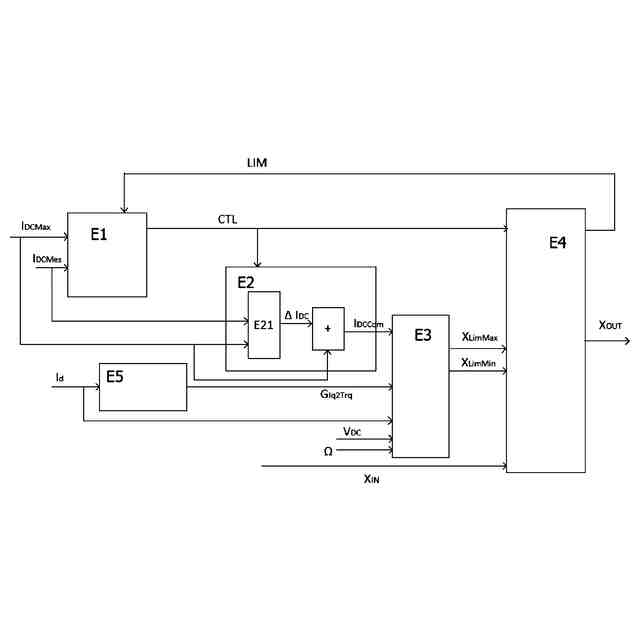
【解決手段】モータの設定トルク(X
OUT
)を表すパラメータの決定方法であって、指令変数(I
DCCom
)を、直流電流閾値(I
DCMax
)及び測定直流電流(I
DCMes
)に基づいて求める調節ステップ(E2)と、設定トルク(X
OUT
)を表すパラメータの上限(X
LimMax
)及び下限(X
LimMin
)を、指令変数(I
DCCom
)に基づいて求める決定ステップ(E3)と、設定トルク(X
OUT
)を表すパラメータを、設定トルク(X
OUT
)を表す前記パラメータの上限(X
LimMax
)及び下限(X
LimMin
)、並びに所望トルク(X
IN
)を表すパラメータに基づいて求める評価ステップ(E4)と、を備える。
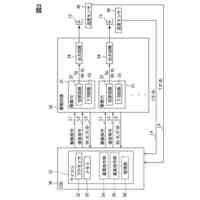
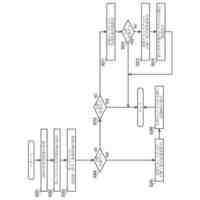
【選択図】図3
特許請求の範囲
【請求項1】
モータ(12)の設定トルク(X
OUT
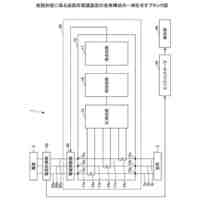
)を表すパラメータの決定方法(100)であって、前記モータ(12)には、少なくとも1つのインバータ(40)からの交流電流(I
AC
)が供給され、前記少なくとも1つのインバータ(40)は、ベクトル制御方法を使用して少なくとも1つのマイクロコントローラ(20)によって駆動され、前記少なくとも1つのインバータ(40)には、少なくとも1つの直流電流供給システム(30)からの直流電流(I
DC
)が供給され、前記方法(100)は、前記少なくとも1つのマイクロコントローラ(20)によって実行され、前記方法(100)は、
制御パラメータ(CTL)が、少なくとも、直流電流閾値(I
DCMax
)、測定直流電流(I
DCMes
)、及び制限パラメータ(LIM)に基づいて求められる制御ステップ(E1)と、
指令変数(I
DCCom
)が、少なくとも、前記直流電流閾値(I
DCMax
)及び前記測定直流電流(I
DCMes
)に基づいて求められる調節ステップ(E2)と、
前記設定トルク(X
OUT
)を表す前記パラメータの上限(X
LimMax
)及び下限(X
LimMin
)が、少なくとも、前記指令変数(I
DCCom
)に基づいて求められる決定ステップ(E3)と、
前記設定トルク(X
OUT
)を表す前記パラメータが、少なくとも、前記設定トルク(X
OUT
)を表す前記パラメータの前記上限(X
LimMax
)及び前記下限(X
LimMin
)、並びに所望トルク(X
IN
)を表すパラメータに基づいて求められる評価ステップ(E4)と、
を備える、方法。
続きを表示(約 1,600 文字)
【請求項2】
前記設定トルク(X
OUT
)を表す前記パラメータ、及び前記所望トルク(X
IN
)を表す前記パラメータは、トルク(T
OUT
,T
IN
)又は横軸電流に対応する、
請求項1に記載の決定方法(100)。
【請求項3】
前記少なくとも1つのインバータが前記設定トルク(X
OUT
)を表す前記パラメータに基づいて前記マイクロコントローラ(20)によって駆動される、駆動ステップを更に備える、
請求項1又は2に記載の決定方法(100)。
【請求項4】
前記調節ステップ(E2)は、前記直流電流閾値(I
DCMax
)と、入力として前記直流電流閾値(I
DCMax
)及び前記測定直流電流(I
DCMes
)を受け取る、積分型及び/又は微分型及び/又は比例型のコントローラ(E21)によって求められる修正動作値(ΔI
DC
)と、の和によって、前記指令変数(I
DCCom
)を求める、
請求項1-3のいずれか1項に記載の決定方法(100)。
【請求項5】
前記設定トルク(X
OUT
)を表す前記パラメータの前記上限(X
LimMax
)及び前記下限(X
LimMin
)は、少なくとも前記指令変数(I
DCCom
)、前記モータの回転速度(Ω)、前記インバータ(40)に供給される直流電圧(V
DC
)、及び前回の反復中に測定され又は求められた前記モータに供給される前記交流電流の直軸電流(l
d
)の関数である数式を解くことによって得られる、
請求項1-4のいずれか1項に記載の決定方法(100)。
【請求項6】
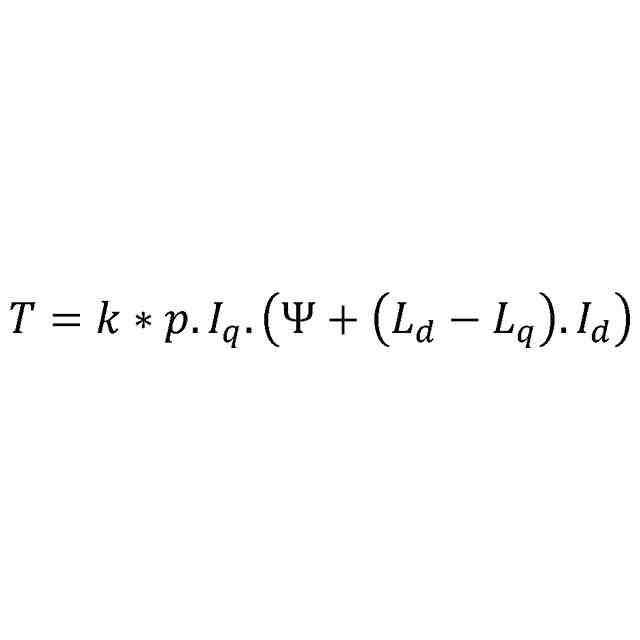
変換利得(G
Iq2Trq
)が、uvw-dq0変換における変換係数、前記モータの極対数(p)、前記uvw-dq0変換における前記モータの等価磁束(Ψ)、前記前回の反復中に測定され又は求められた前記モータに供給される前記交流電流の前記直軸電流(l
d
)、及び前記モータの直軸インダクタンス(L
d
)又は横軸インダクタンス(L
q
)に基づいて求められる、計算ステップ(E5)を備える、
請求項5に記載の決定方法(100)。
【請求項7】
前記制御パラメータ(CTL)は、
前記測定直流電流(I
DCMes
)が前記直流電流閾値(I
DCMax
)以上であるときにはアクティブ状態(IN)に変化し、
前記測定直流電流(I
DCMes
)が前記直流電流閾値(I
DCMax
)未満であり、かつ、前記設定トルク(X
OUT
)を表す前記パラメータが前記所望トルク(X
IN
)を表す前記パラメータに等しいときには非アクティブ状態(OFF)に変化する、
請求項1-6のいずれか1項に記載の決定方法(100)。
【請求項8】
前記制御パラメータ(CTL)は、前記非アクティブ状態(OFF)で開始される、
請求項7に記載の決定方法(100)。
【請求項9】
請求項1-8のいずれか1項に記載の決定方法(100)によって求められる、設定トルク(X
OUT
)を表す前記パラメータによって制御される少なくとも1つのモータ(12)を備える、
パワーステアリングシステム(1)。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電気モータの分野、特に電気モータの設定トルクを表すパラメータを求める方法に関する。
続きを表示(約 1,400 文字)
【0002】
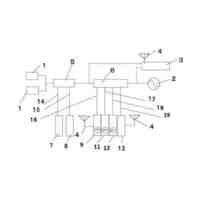
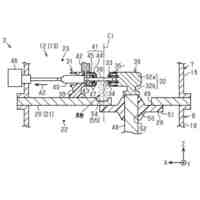
本発明は、電気モータ、特に、相や巻線の数に関係なく、ベクトル制御方法によって駆動される、ブラシレス電気モータに適用される。電気モータは、交流の供給電流をこのベクトル制御方法によって駆動されるインバータから受け取り、インバータには直流の供給電流が供給される。
【背景技術】
【0003】
以下では、直流の供給電流は直流電流、交流の供給電流は交流電流と呼ばれる。
【0004】
以下では、インバータの直流電流を供給又は回収する役割を担う、インバータの上流のシステムは、直流供給システム、すなわち、直流システムと呼ばれる。例えば、この上流のシステムは、電池又はDC-DCコンバータであり得る。
【0005】
インバータは、直流電流を、モータに供給される交流電流に変換する。
【0006】
フィールド指向制御とも呼ばれるベクトル制御は、モータの交流電流が、以下では横軸電流と呼ばれlqと表記される、q軸に沿う成分と、直軸電流と呼ばれldと表記される、d軸に沿う成分との2つの直交する成分に分解される、電気モータ用の既知の制御方法である。横軸電流lq及び直軸電流ldは、dと表記されるいわゆる磁化の直軸及びqと表記される横軸の空間電流である。横軸電流lq及び直軸電流ldは、電気モータのロータに関係する回転参照フレームへの、三相電流システムの空間投影に対応する。よって、横軸電流lq及び直軸電流ldは、直軸dに対する三相電流システムの位相シフト及び三相電流システムの振幅の関数である。低リラクタンスモータでは、直軸電流ldは、一般に、感知される磁束の減少を可能にして高速での動作を最適化し、一方、横軸電流lqは、以下ではモータトルクと呼ばれる、モータによって与えられるトルクを制御する。直軸電流ld及び横軸電流lqは、例えば、設定トルク、モータの回転速度、モータの温度、及びモータに供給される交流の電圧、のうちの少なくとも1つのパラメータによって特徴付けられるモータの動作点に基づいて求められる。
【0007】
モータには、直軸成分ld及び横軸成分lqを含みインバータによって提供される交流が供給される。
【発明の概要】
【発明が解決しようとする課題】
【0008】
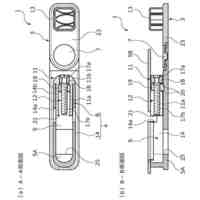
本発明は、自動車製造者が、パワーステアリングシステムの電力消費、換言すると供給される直流電流、をより正確に制御しようと努めている、車両用のパワーステアリングの分野に好ましくは適用される。
【0009】
車両のステアリングシステムの目的は、ステアリングホイールによって車両の車輪の向きの角度を修正することによって、運転者が車両の進路を制御することを可能にすることである。電動パワーステアリングシステムの消費電力は、車輪によって伝達される力(駐車操作、運転、低グリップ等)と運転者のステアリングホイールを回したいという欲求とに依存するので、予測することが難しい。しかし、電動パワーステアリングシステムには、非常に大きな電力を消費する能力及び傾向がある。
【0010】
パワーステアリングシステムの消費電力を制御することを可能にするさまざまな解決策が存在する。交流のレベルでモータへの供給電圧を制御することに基づくものもあれば、モータトルク又は横軸電流lqに基づくものもある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
モータ
17日前
個人
総反回転復動発電器
6日前
個人
回転装置のハルバッハ磁石配列
4日前
株式会社神戸製鋼所
電動機
18日前
株式会社神戸製鋼所
電動機
3日前
神保電器株式会社
配線器具取付枠
17日前
住友電装株式会社
電気接続箱
17日前
個人
路面走行車両を利用した発電システム
18日前
個人
太陽光発電電力活用プラットフォーム
17日前
富士電機株式会社
電力変換装置
17日前
株式会社ダイヘン
電力システム
17日前
株式会社ダイヘン
電力システム
3日前
矢崎総業株式会社
蓄電システム
18日前
東芝ライテック株式会社
電源装置
21日前
株式会社豊田自動織機
電動圧縮機
3日前
株式会社ミツバ
電動モータ
10日前
TDK株式会社
電力変換装置
3日前
システムカワバタ有限会社
コード収納装置
11日前
株式会社ダイヘン
無効電力補償装置
3日前
日新電機株式会社
ガス絶縁開閉装置
21日前
株式会社デンソー
電力変換装置
17日前
大阪瓦斯株式会社
電力調達装置
17日前
株式会社デンソー
電力制御装置
4日前
株式会社アイシン
車両用駆動装置
3日前
日立Astemo株式会社
電子制御装置
3日前
テルモ株式会社
保護回路及び電子機器
4日前
株式会社TMEIC
無効電力補償装置
3日前
大和ハウス工業株式会社
電力融通システム
17日前
富士電機機器制御株式会社
過負荷保護装置
17日前
株式会社ミツバ
モータ
21日前
株式会社デンソー
モータ
11日前
株式会社ワィティー
アキシャルギャップ誘導モータ
3日前
株式会社デンソー
モータ制御装置
3日前
富士電機株式会社
半導体装置、電力変換装置
3日前
トヨタ自動車株式会社
サーバ
3日前
株式会社デンソー
モータ
17日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ