TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025014975
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023117988
出願日
2023-07-20
発明の名称
歪み補正係数算出方法およびプログラム
出願人
富士通株式会社
代理人
弁理士法人扶桑国際特許事務所
主分類
G06T
5/80 20240101AFI20250123BHJP(計算;計数)
要約
【課題】一般的な環境の撮影画像から歪み補正係数を高精度に算出する。
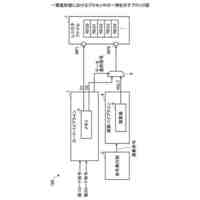
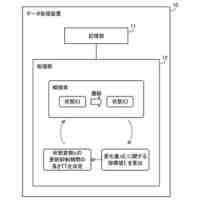
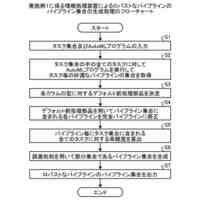
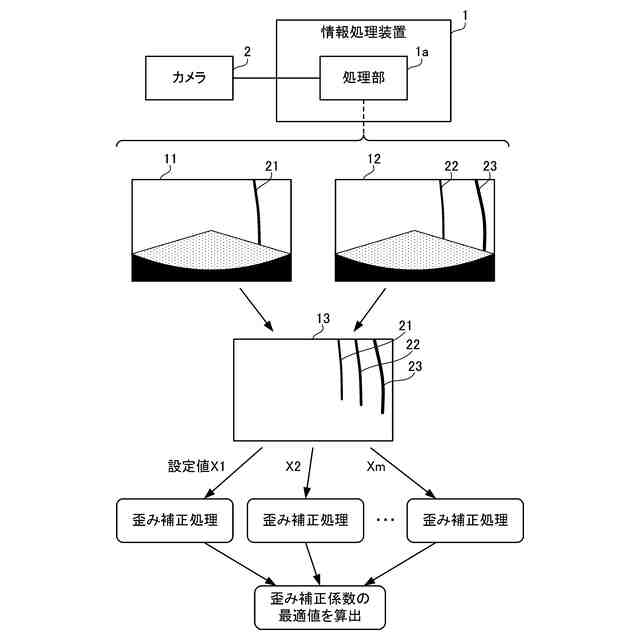
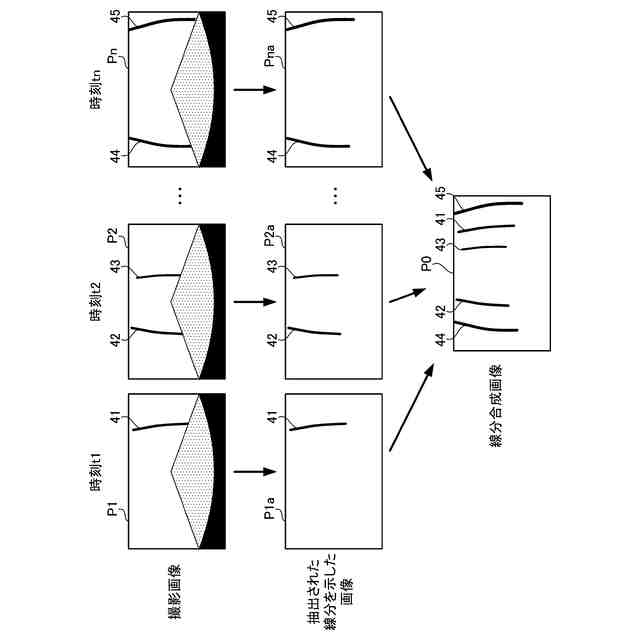
【解決手段】情報処理装置1の処理部1aは、撮影時刻が異なる複数の撮影画像11,12のそれぞれに対して線分抽出処理を実行することで、複数の線分21~23を抽出する。処理部1aは、抽出された複数の線分21~23に対して歪み補正係数の設定値を変化させながら歪み補正処理を実行して処理結果を評価することで、歪み補正係数の最適値を算出する。複数の撮影画像11,12から複数の線分21~23を抽出することで、歪み補正係数の最適値を算出するために用いる線分の数を増やすことができる。その結果、線分の数が少ない画像が撮影された場合でも歪み補正係数を高精度に算出できる。
【選択図】図1
特許請求の範囲
【請求項1】
コンピュータが、
撮影時刻が異なる複数の撮影画像のそれぞれに対して線分抽出処理を実行することで、複数の線分を抽出し、
前記複数の線分に対して歪み補正係数の設定値を変化させながら歪み補正処理を実行して処理結果を評価することで、前記歪み補正係数の最適値を算出する、
歪み補正係数算出方法。
続きを表示(約 580 文字)
【請求項2】
前記複数の線分の抽出では、前記複数の撮影画像のそれぞれから抽出された線分の中から、位置および方向が他の線分と類似する線分を除外し、残りの線分を前記複数の線分として抽出する、
請求項1記載の歪み補正係数算出方法。
【請求項3】
前記複数の線分の抽出では、前記複数の撮影画像のそれぞれから抽出された線分の中から、画像中央の所定領域に含まれる線分を除外し、残りの線分を前記複数の線分として抽出する、
請求項1記載の歪み補正係数算出方法。
【請求項4】
前記最適値の算出では、
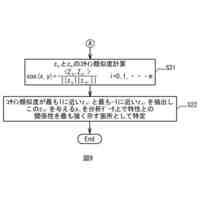
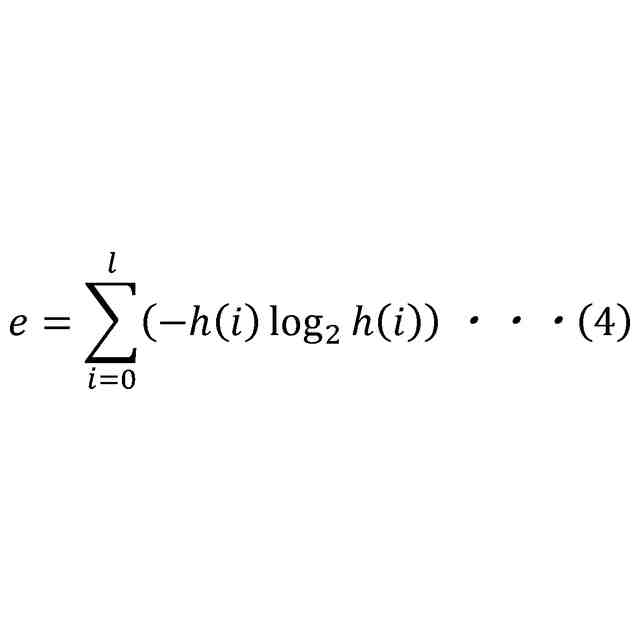
前記設定値を変化させながら前記歪み補正処理を実行するたびに、前記歪み補正処理の実行後の前記複数の線分についての方向ヒストグラムのエントロピーを算出し、
前記エントロピーに基づいて前記最適値を算出する、
請求項1記載の歪み補正係数算出方法。
【請求項5】
コンピュータに、
撮影時刻が異なる複数の撮影画像のそれぞれに対して線分抽出処理を実行することで、複数の線分を抽出し、
前記複数の線分に対して歪み補正係数の設定値を変化させながら歪み補正処理を実行して処理結果を評価することで、前記歪み補正係数の最適値を算出する、
処理を実行させる歪み補正係数算出プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、歪み補正係数算出方法およびプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
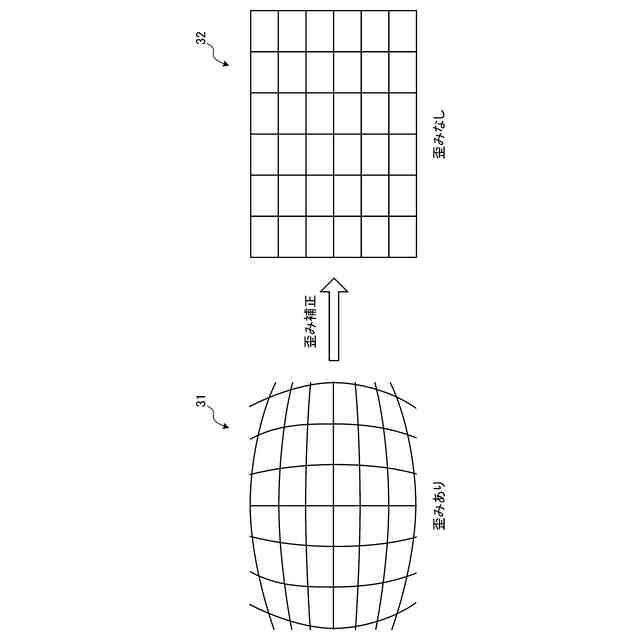
撮影された画像から、対象物の位置や速度、対象物までの距離などを推定する技術が普及している。このような推定には、撮影に使用したカメラに関するカメラパラメータが必要となる。カメラパラメータ(特に、内部パラメータ)の1つとして、レンズの歪曲収差を補正するための歪み補正係数がある。
【0003】
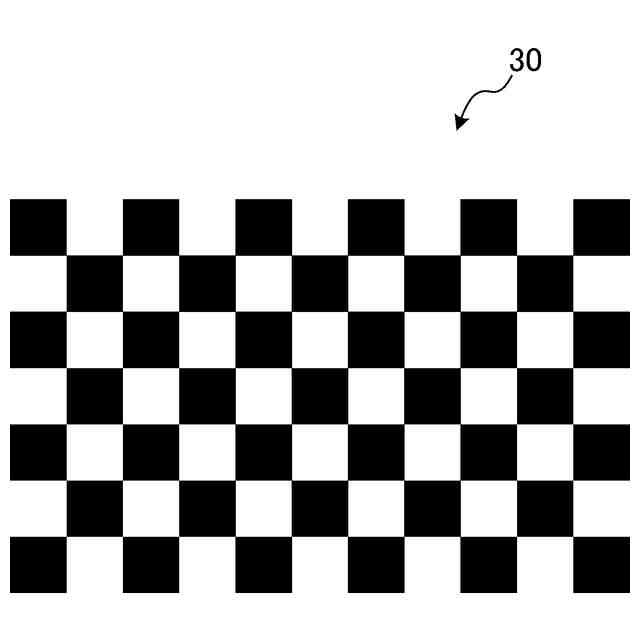
歪み補正係数を計算する方法としては、例えば、チェッカーボードなどの専用の画像パターンを撮影し、画像上の画像パターンの位置を基に歪み補正係数を計算する方法がある。しかし、この方法では、カメラごとに専用の画像パターンを用いて歪み補正係数を計算する必要があり、利便性が低い。また、撮影の仕方によって計算結果に誤差が生じ得るので、作業のために一定の技術が必要となる。
【0004】
これに対して、専用の画像パターンを用いずに、一般的な環境を撮影した画像を用いて歪み補正係数を計算する方法も考えられている。例えば、撮影画像に対して歪み補正処理を施したときの画像内の直線成分の写り方に基づいて、最適な歪み補正係数を推定する技術が提案されている。
【0005】
なお、関連技術として、画像から線分を抽出し、抽出された各線分について直線の一部が歪曲されたものと仮定して歪曲収差係数を算出し、算出結果を統計的に処理することで最適な歪曲収差係数を推定する方法が提案されている。
【先行技術文献】
【特許文献】
【0006】
特開2004-86747号公報
【非特許文献】
【0007】
鹿貫悠多、群馬大学大学院博士論文「環境構造を利用したカメラ放射歪の自動補正技術の研究」、平成27年12月
【発明の概要】
【発明が解決しようとする課題】
【0008】
上記のように、撮影画像に対して歪み補正処理を施したときの画像内の直線成分の写り方に基づいて歪み補正係数を推定する技術では、撮影画像に写っている直線成分の数が少ない場合には推定精度が低下するという問題がある。例えば、建造物が少ない領域を走行したときに撮影された車載カメラの撮影画像には、直線成分が少なく、このような撮影画像からは歪み補正係数を高精度に推定できない。
【0009】
1つの側面では、本発明は、一般的な環境の撮影画像から歪み補正係数を高精度に算出可能な歪み補正係数算出方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
1つの案では、コンピュータが次のような処理を実行する歪み補正係数算出方法が提供される。この歪み補正係数算出方法において、コンピュータは、撮影時刻が異なる複数の撮影画像のそれぞれに対して線分抽出処理を実行することで、複数の線分を抽出し、複数の線分に対して歪み補正係数の設定値を変化させながら歪み補正処理を実行して処理結果を評価することで、歪み補正係数の最適値を算出する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
富士通株式会社
予測
18日前
富士通株式会社
プロセッサ
25日前
富士通株式会社
シーン検出
18日前
富士通株式会社
グラフ表現
5日前
富士通株式会社
画像符号化
5日前
富士通株式会社
冷却部品、及び冷却装置
12日前
富士通株式会社
通信制御装置及び基地局制御方法
4日前
富士通株式会社
能動学習プログラム、方法、及び装置
11日前
富士通株式会社
ネットワーク装置及びモデル学習方法
5日前
富士通株式会社
ネットワーク装置及びモデル学習方法
25日前
富士通株式会社
光伝送装置および送信光パワー制御方法
19日前
富士通株式会社
サーバ監視システムおよびサーバ監視方法
11日前
富士通株式会社
支援プログラム、支援方法及び情報処理装置
25日前
富士通株式会社
生成プログラム、生成方法および情報処理装置
18日前
富士通株式会社
評価プログラム、評価方法および情報処理装置
18日前
富士通株式会社
推定プログラム、推定方法、及び情報処理装置
25日前
富士通株式会社
演算プログラム、演算方法、および情報処理装置
5日前
富士通株式会社
演算プログラム、演算方法、および情報処理装置
4日前
富士通株式会社
予測プログラム、予測方法、および情報処理装置
4日前
富士通株式会社
データ処理装置、プログラム及びデータ処理方法
15日前
富士通株式会社
半導体装置、半導体装置の製造方法及び電子装置
4日前
富士通株式会社
プログラム、データ処理方法およびデータ処理装置
5日前
富士通株式会社
制御装置、制御方法、通信システム、及び基地局装置
4日前
富士通株式会社
情報処理プログラム、情報処理方法及び情報処理装置
18日前
富士通株式会社
情報処理プログラム、情報処理方法及び情報処理装置
19日前
富士通株式会社
情報処理プログラム、情報処理方法、及び情報処理装置
1日前
富士通株式会社
情報処理プログラム、情報処理方法、および情報処理装置
5日前
富士通株式会社
光送信器、これを用いた光トランシーバ、及び波長制御方法
19日前
富士通株式会社
データ処理装置、データ処理プログラム及びデータ処理方法
25日前
富士通株式会社
通知先決定プログラム、通知先決定方法及び通知先決定装置
18日前
富士通株式会社
伝送路パラメータ推定装置および伝送路パラメータ推定方法
4日前
富士通株式会社
情報処理プログラム、情報処理システム、および情報処理方法
4日前
富士通株式会社
アバター生成プログラム、アバター生成方法および情報処理装置
18日前
富士通株式会社
パイプライン集合生成プログラム、パイプライン集合生成方法及び情報処理装置
5日前
富士通株式会社
アンケート結果分析プログラム、アンケート結果分析方法、および情報処理装置
4日前
富士通株式会社
パイプライン集合生成プログラム、パイプライン集合生成方法及び情報処理装置
1日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ