TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025001909
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023101675
出願日
2023-06-21
発明の名称
異物検出システム、異物検出装置、異物検出方法、及び、異物検出プログラム
出願人
日本電気株式会社
代理人
個人
主分類
G01S
17/04 20200101AFI20241226BHJP(測定;試験)
要約
【課題】舗装路面に取り残された異物を高い確度で検出する。
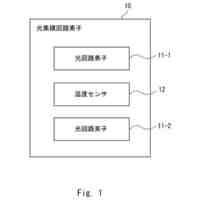
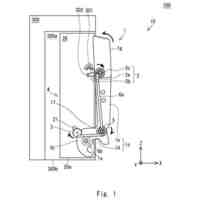
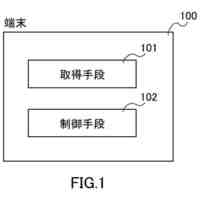
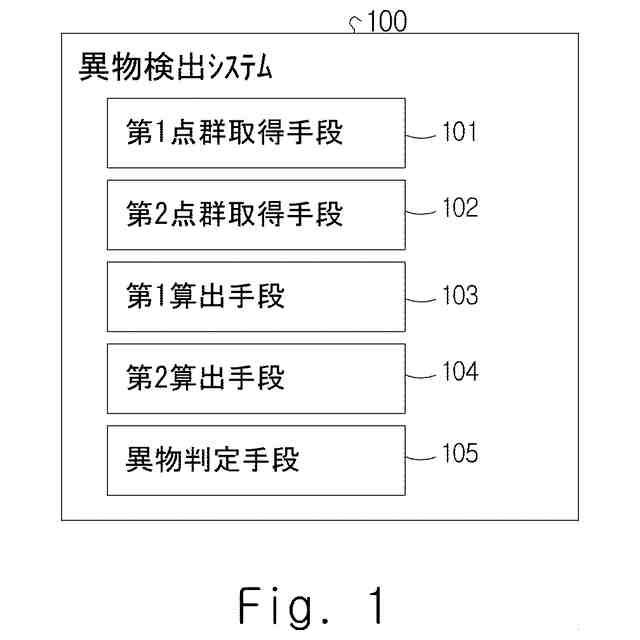
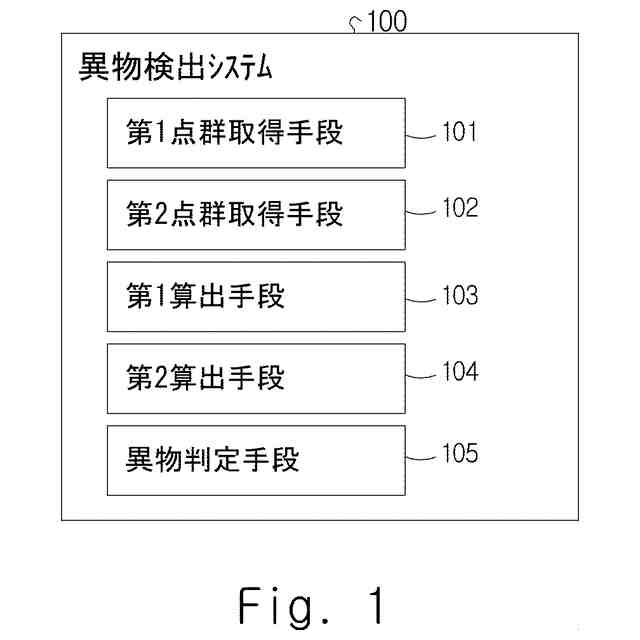
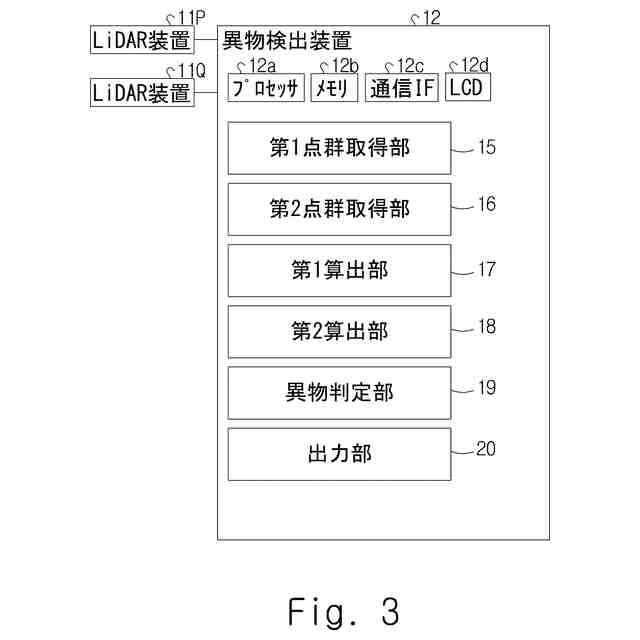
【解決手段】第1点群取得手段101は、舗装路面を第1時刻で測距して生成された第1点群を取得する。第2点群取得手段102は、舗装路面を第1時刻よりも後の第2時刻で測距して生成された第2点群を取得する。第1算出手段103は、第1検出空間における第1点密度分布特性を第1点群に基づいて算出する。第2算出手段104は、第1検出空間と対応する第2検出空間における第2点密度分布特性を第2点群に基づいて算出する。異物判定手段105は、第1点密度分布特性と第2点密度分布特性に基づいて、第2時刻において舗装路面に異物が取り残されているか否か判定する。
【選択図】図1
特許請求の範囲
【請求項1】
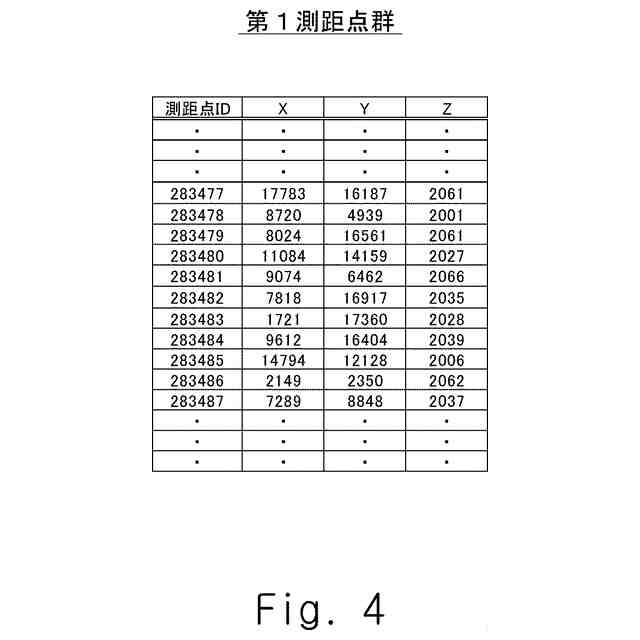
舗装路面を第1時刻で測距して生成された第1点群を取得する第1点群取得手段と、
前記舗装路面を前記第1時刻よりも後の第2時刻で測距して生成された第2点群を取得する第2点群取得手段と、
第1検出空間における第1点密度分布特性を前記第1点群に基づいて算出する第1算出手段と、
前記第1検出空間と対応する第2検出空間における第2点密度分布特性を前記第2点群に基づいて算出する第2算出手段と、
前記第1点密度分布特性と前記第2点密度分布特性に基づいて、前記第2時刻において前記舗装路面に異物が取り残されているか否か判定する異物判定手段と、
を含む、
異物検出システム。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の異物検出システムであって、
前記第1点密度分布特性及び前記第2点密度分布特性は、何れも、平均値、最頻値、または、中央値の何れかを示す第1指標値を有し、
前記異物判定手段は、前記第1点密度分布特性の前記第1指標値と前記第2点密度分布特性の前記第1指標値の差分に基づいて、前記第2時刻において前記舗装路面に異物が取り残されているか否か判定する、
異物検出システム。
【請求項3】
請求項2に記載の異物検出システムであって、
前記第1点密度分布特性は、分散を示す第2指標値を有し、
前記異物判定手段は、前記第1点密度分布特性の前記第1指標値と前記第2点密度分布特性の前記第1指標値の差分を前記第1点密度分布特性の前記第2指標値と比較した比較結果に基づいて、前記第2時刻において前記舗装路面に異物が取り残されているか否か判定する、
異物検出システム。
【請求項4】
請求項1から3の何れか1項に記載の異物検出システムであって、
前記第1算出手段は、
前記第1点群のうち前記第1検出空間に含まれる複数の点のそれぞれにおける点密度を算出し、
前記複数の点のそれぞれにおける点密度に基づいて前記第1点密度分布特性を算出する、
異物検出システム。
【請求項5】
請求項1から3の何れか1項に記載の異物検出システムであって、
前記第2算出手段は、
前記第2点群のうち前記第2検出空間に含まれる複数の点のそれぞれにおける点密度を算出し、
前記複数の点のそれぞれにおける点密度に基づいて前記第2点密度分布特性を算出する、
異物検出システム。
【請求項6】
請求項1から3の何れか1項に記載の異物検出システムであって、
前記第1検出空間と前記第2検出空間は、同一の検出空間、または、互いに重複する検出空間である、
異物検出システム。
【請求項7】
請求項1から3の何れか1項に記載の異物検出システムであって、
前記第1検出空間と前記第2検出空間は、球状の空間である、
異物検出システム。
【請求項8】
舗装路面を第1時刻で測距して生成された第1点群を取得する第1点群取得手段と、
前記舗装路面を前記第1時刻よりも後の第2時刻で測距して生成された第2点群を取得する第2点群取得手段と、
第1検出空間における第1点密度分布特性を前記第1点群に基づいて算出する第1算出手段と、
前記第1検出空間と対応する第2検出空間における第2点密度分布特性を前記第2点群に基づいて算出する第2算出手段と、
前記第1点密度分布特性と前記第2点密度分布特性に基づいて、前記第2時刻において前記舗装路面に異物が取り残されているか否か判定する異物判定手段と、
を含む、
異物検出装置。
【請求項9】
コンピュータが、
舗装路面を第1時刻で測距して生成された第1点群を取得し、
前記舗装路面を前記第1時刻よりも後の第2時刻で測距して生成された第2点群を取得し、
第1検出空間における第1点密度分布特性を前記第1点群に基づいて算出し、
前記第1検出空間と対応する第2検出空間における第2点密度分布特性を前記第2点群に基づいて算出し、
前記第1点密度分布特性と前記第2点密度分布特性に基づいて、前記第2時刻において前記舗装路面に異物が取り残されているか否か判定する、
異物検出方法。
【請求項10】
コンピュータに、請求項9に記載の異物検出方法を実行させる異物検出プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、異物検出システム、異物検出装置、異物検出方法、及び、異物検出プログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
空港に代表される航空機用の施設を運営するに際し、航空機用の舗装路面、即ち滑走路や誘導路、駐機場を綿密に点検することは重要な課題である。なぜなら、舗装路面に異物が取り残されている場合があるからである。異物としては、動物の死骸のような比較的大きなものもあれば、航空機を整備するための工具のような比較的小さなもの、ひいては、航空機や巡回車両から脱落した部品のような微小なものもある。これらの異物は、航空機のタイヤを破裂させたり、ジェットエンジンに吸い込まれることでジェットエンジンに致命的なダメージを与えたりする。このような事態を回避すべく、空港職員は、定期的に舗装路面を巡回し、異物の発見と除去に努めなければならない。しかしながら、舗装路面は極めて広大であり、上記の定期的な巡回には多大な費用を要していた。
【0003】
特許文献1は、圃場の農作物を刈り取る収穫機を開示している。この収穫機は、ステレオカメラを備えている。収穫機は、ステレオカメラから取得した一対の撮像画像を用いてステレオマッチングを行うことで三次元点群を生成する。収穫機は、三次元点群に基づいて障害物を検出する。具体的には、収穫機は、走行方向前方の処理対象空間を水平方向及び垂直方向において格子状に区分けする。これにより、収穫機は、処理対象空間を複数のセルに区分けする。次に、収穫機は、三次元点群を対応するセルに格納する。そして、収穫機は、点密度が所定のしきい値を超えたセルに障害物があると推定する。
【先行技術文献】
【特許文献】
【0004】
特許第7195543号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
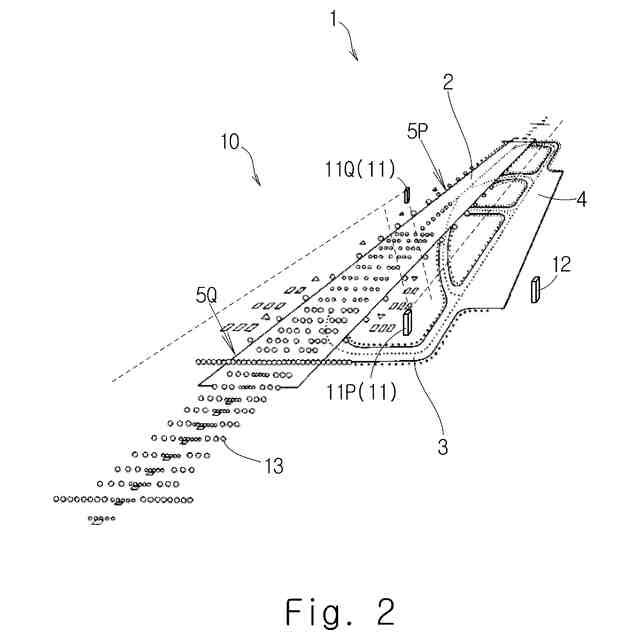
ところで、本願発明者らは、航空機用の施設にLiDAR装置を設置し、当該LiDAR装置から出力される三次元点群を用いて航空機用の舗装路面に取り残された異物を検出することを検討している。具体的には、本願発明者らは、異物を検出するに際し、上記特許文献1のように三次元点群の点密度に着目している。しかしながら、三次元点群の点密度に基づいて異物を検出しようとする場合、幾つかの解決できない問題が存在している。
【0006】
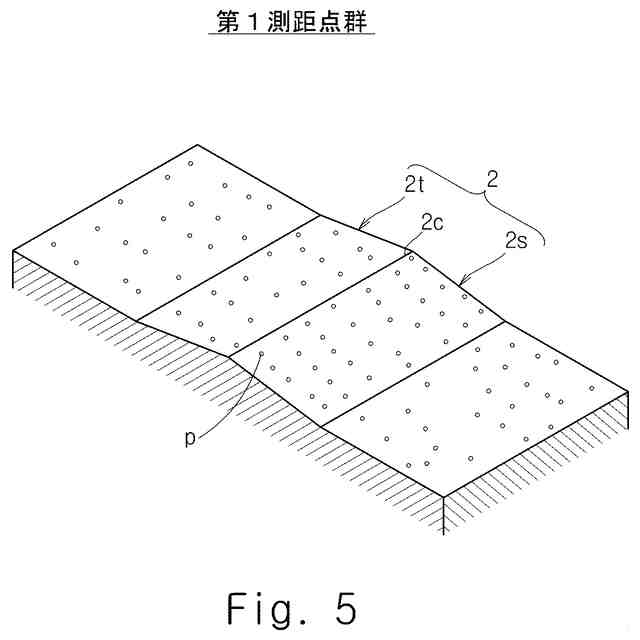
第1に、LiDAR装置は、関係法規に従って地表近くに設置されなければならない。これに対し、航空機用の舗装路面は水平距離にして数キロメートルに及ぶ。従って、LiDAR装置は、レーザ光を舗装路面に向かって極めて浅い角度で照射することになる。一方で、舗装路面に排水性を持たせるために、舗装路面は一般的に逆V字に傾斜している。即ち、舗装路面は、中心線を堺に第1傾斜面と第2傾斜面を有する。第1傾斜面は、中心線よりもLiDAR装置に近い傾斜面である。第2傾斜面は、中心線よりもLiDAR装置から遠い傾斜面である。この場合、第1傾斜面の点密度は、第2傾斜面の点密度よりも必然的に高くなるだろう。このように点密度は舗装路面の傾斜自体に大きく影響を受けるので、点密度を用いた異物検出は過検知や検知漏れを免れない。
【0007】
第2に、LiDAR装置は数キロメートル先にレーザ光を照射することになるので、当該レーザ光の発散に起因して測距精度が劣化する。測距精度が劣化することは、それ自体が点密度の粗密を招く。このように点密度はLiDAR装置からのレーザ光の照射距離自体に大きく影響を受けるので、点密度を用いた異物検出は過検知や検知漏れを免れない。
【0008】
このように、舗装路面上に異物がなければ舗装路面の点密度が均一になることを前提とした異物検出は、実際の運用に耐え得る検出確度を提供することができない。
【0009】
本開示の目的は、舗装路面に取り残された異物を高い確度で検出する技術を提供することにある。
【課題を解決するための手段】
【0010】
本開示の第1の観点によれば、
舗装路面を第1時刻で測距して生成された第1点群(point cloud)を取得する第1点群取得手段と、
前記舗装路面を前記第1時刻よりも後の第2時刻で測距して生成された第2点群を取得する第2点群取得手段と、
第1検出空間における第1点密度分布特性を前記第1点群に基づいて算出する第1算出手段と、
前記第1検出空間と対応する第2検出空間における第2点密度分布特性を前記第2点群に基づいて算出する第2算出手段と、
前記第1点密度分布特性と前記第2点密度分布特性に基づいて、前記第2時刻において前記舗装路面に異物が取り残されているか否か判定する異物判定手段と、
を含む、
異物検出システムが提供される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本電気株式会社
管理装置
1か月前
日本電気株式会社
特定装置
10日前
日本電気株式会社
監視装置
1か月前
日本電気株式会社
監視装置
1か月前
日本電気株式会社
光モジュール
1か月前
日本電気株式会社
海底分岐装置
1か月前
日本電気株式会社
異常検知装置
1か月前
日本電気株式会社
光集積回路素子
1か月前
日本電気株式会社
レーザモジュール
2か月前
日本電気株式会社
超伝導量子回路装置
2か月前
日本電気株式会社
システム、装置及び方法
2か月前
日本電気株式会社
推論装置および推論方法
1か月前
日本電気株式会社
ラインカード及びイジェクタ
1か月前
日本電気株式会社
制御装置、プログラム及び方法
2か月前
日本電気株式会社
考査装置、考査方法、プログラム
1か月前
日本電気株式会社
時刻維持装置および時刻維持方法
1か月前
日本電気株式会社
考査装置、考査方法、プログラム
1か月前
日本電気株式会社
ボロメータアレイ、及び光検出方法
12日前
日本電気株式会社
交渉装置、交渉方法及びプログラム
18日前
日本電気株式会社
交渉装置、交渉方法及びプログラム
1か月前
日本電気株式会社
推定装置、推定方法及びプログラム
2か月前
日本電気株式会社
端末、端末の制御方法及びプログラム
1か月前
日本電気株式会社
監視装置、監視方法、及びプログラム
1か月前
日本電気株式会社
レコメンド装置およびレコメンド方法
1か月前
日本電気株式会社
情報処理装置、制御方法及び記憶媒体
2か月前
日本電気株式会社
学習装置、学習方法及び学習プログラム
2か月前
日本電気株式会社
情報処理装置、方法、及び、プログラム
3日前
日本電気株式会社
安否確認支援装置、方法及びプログラム
1か月前
日本電気株式会社
情報処理装置、方法、及び、プログラム
3日前
日本電気株式会社
乗車誘導計画装置および乗車誘導計画方法
24日前
日本電気株式会社
情報処理装置、情報処理方法、プログラム
3日前
日本電気株式会社
店舗端末、情報処理方法、及びプログラム
1か月前
日本電気株式会社
情報処理装置、情報処理方法、プログラム
1か月前
日本電気株式会社
情報処理装置、情報処理方法、プログラム
10日前
日本電気株式会社
制御装置、制御プログラム、および制御方法
3日前
日本電気株式会社
健康管理装置、健康管理方法及びプログラム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ