TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024172555
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023090344
出願日
2023-05-31
発明の名称
モータ制御装置及びモータ制御方法
出願人
株式会社デンソー
代理人
弁理士法人太陽国際特許事務所
主分類
H02P
21/12 20160101AFI20241205BHJP(電力の発電,変換,配電)
要約
【課題】モータの負荷や回転速度が変化しても、電流検出を不要としかつ複雑な演算処理をすることなく、d軸電流を制御可能とする。
【解決手段】モータ制御装置(10)は、予めモータ(30)の進角マップ値と負荷率を関係付けた進角マップを記憶するメモリ(14)と、モータ(30)に対するモータ印加電圧でのモータ(30)の負荷率を算出し、算出した負荷率を用いて進角マップから得られた進角マップ値とモータ印加電圧に基づいて算出した進角を設定する進角設定部(13)と、設定した進角でモータを制御するPWM駆動制御部(17)と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
予めモータ(30)の進角マップ値と負荷率を関係付けた進角マップを記憶する記憶部(14)と、
前記モータに対する印加電圧であるモータ印加電圧での前記モータの負荷率を算出する算出部(13)と、
算出した前記負荷率を用いて前記進角マップから得られた進角マップ値と前記モータ印加電圧に基づいて算出した進角を設定する設定部(13)と、
設定した前記進角で前記モータを制御する駆動制御部(17)と、
を備えたモータ制御装置(10)。
続きを表示(約 1,000 文字)
【請求項2】
前記進角マップは、前記モータのd軸電流が0となるように設定される、
請求項1に記載のモータ制御装置。
【請求項3】
前記進角マップは、前記モータのd軸電流が0となるように設定された前記進角マップより、特定の負荷率範囲で進角が大きく設定される、
請求項2に記載のモータ制御装置。
【請求項4】
前記進角マップは、前記負荷率が所定値未満の範囲では遅角になるように設定される、
請求項1に記載のモータ制御装置。
【請求項5】
前記所定値未満の範囲は、前記負荷率がマイナスの範囲である、
請求項4に記載のモータ制御装置。
【請求項6】
前記設定部は、前記モータの回転速度が閾値以下の場合、前記進角を固定するモードに切り替える、
請求項1に記載のモータ制御装置。
【請求項7】
前記モータの温度に応じて前記進角を補正する補正部(15)を更に備えた
請求項1に記載のモータ制御装置。
【請求項8】
外部から取得した情報に基づいて前記進角を補正する補正部(15)を更に備えた
請求項1に記載のモータ制御装置。
【請求項9】
予めモータの進角マップ値と回転速度を関係付けた進角マップを記憶する記憶部(14)と、
前記モータの負荷を推定する推定部(13)と、
推定した前記負荷から進角補正値を算出する算出部(13)と、
前記モータの実際の回転速度を用いて前記進角マップから得られた進角マップ値と算出した前記進角補正値に基づいて算出した進角を設定する設定部(13)と、
設定した前記進角で前記モータを制御する駆動制御部(17)と、
を備えたモータ制御装置(10A)。
【請求項10】
予めモータの進角マップ値と負荷を関係付けた進角マップを記憶する記憶部(14)と、
前記モータの負荷を推定する推定部(13)と、
前記モータの実際の回転速度から進角補正値を算出する算出部(13)と、
推定した前記負荷を用いて前記進角マップから得られた進角マップ値と算出した前記進角補正値に基づいて算出した進角を設定する設定部(13)と、
設定した前記進角で前記モータを制御する駆動制御部(17)と、
を備えたモータ制御装置(10B)。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、モータ制御装置及びモータ制御方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
ブラシレスモータは、ベクトル制御を用いることにより、回転速度や負荷が変化しても最適な電流位相に調整され、最適なモータ特性で電流を抑制し効率的に動作させることができる。
【0003】
例えば、特許文献1には、永久磁石同期モータを駆動する電力変換器の出力電圧を、第1のd軸電流指令値から演算した第2のd軸電流指令値と、第1のq軸電流指令値から演算した第2のq軸電流指令値と、周波数指令値と、モータ定数設定値とに基づいて制御する、永久磁石同期モータのベクトル制御装置が記載されている。このベクトル制御装置は、第2のd軸電流指令値と第2のq軸電流指令値と、電力変換器の出力電流の検出値と、モータ定数設定値とを用いて、電力変換器に接続した永久磁石同期モータのモータ定数を同定するモータ定数同定演算部を備え、モータ定数同定演算部が同定したモータ定数をベクトル制御演算に用いて永久磁石モータを駆動制御する。
【先行技術文献】
【特許文献】
【0004】
特開2007-049843号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記ベクトル制御では、電流を検出する電流検出部と、座標変換等の演算を行う演算部と、が必要とされ、特に電流変化が大きい場合は電流制御の周期を高速化しなくてはならず、処理能力の高いマイクロコンピュータを採用する必要がある。このため、コストを重視する場合は、予め進角を固定又は回転速度に応じて進角を設定することがある。この場合、回転速度や負荷が変動する用途では、d軸電流が過大となり、効率、速度制御性が低下する場合があった。
【0006】
本開示は、モータの負荷や回転速度が変化しても、電流検出を不要としかつ複雑な演算処理をすることなく、d軸電流を制御可能とするモータ制御装置及びモータ制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
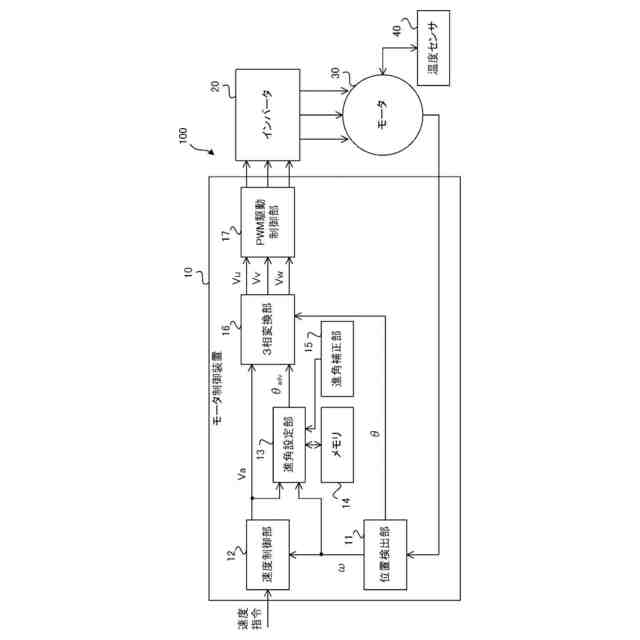
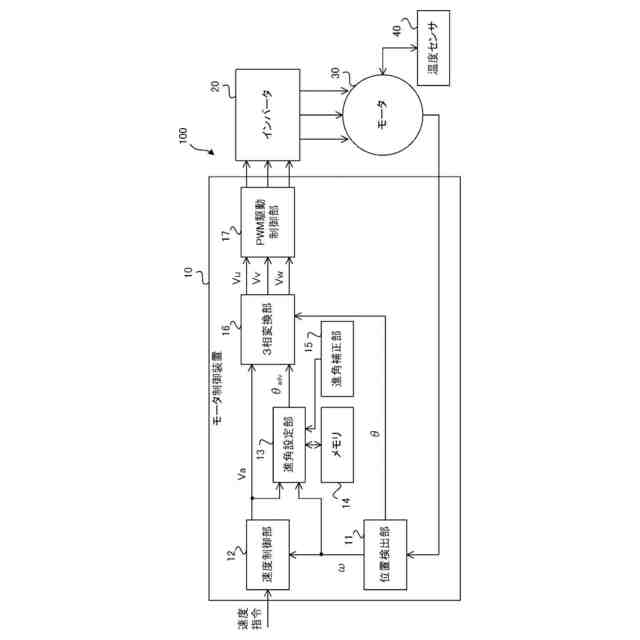
本開示の第1態様に係るモータ制御装置は、予めモータの進角マップ値と負荷率を関係付けた進角マップを記憶する記憶部と、前記モータに対する印加電圧であるモータ印加電圧での前記モータの負荷率を算出する算出部と、算出した前記負荷率を用いて前記進角マップから得られた進角マップ値と前記モータ印加電圧に基づいて算出した進角を設定する設定部と、設定した前記進角で前記モータを制御する駆動制御部と、を備える。
【0008】
本開示の第2態様に係るモータ制御方法は、予めモータの進角マップ値と負荷率を関係付けた進角マップを記憶する記憶部を備えたモータ制御装置によるモータ制御方法であって、前記モータ制御装置が、前記モータに対する印加電圧であるモータ印加電圧での前記モータの負荷率を算出し、算出した前記負荷率を用いて前記進角マップから得られた進角マップ値と前記モータ印加電圧に基づいて算出した進角を設定し、設定した前記進角で前記モータを制御する。
【発明の効果】
【0009】
開示の技術によれば、モータの負荷や回転速度が変化しても、電流検出を不要としかつ複雑な演算処理をすることなく、d軸電流を制御することができる、という効果を有する。
【図面の簡単な説明】
【0010】
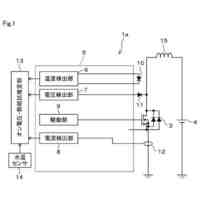
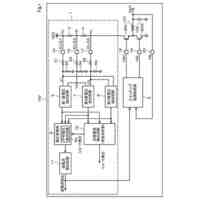
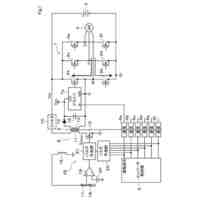
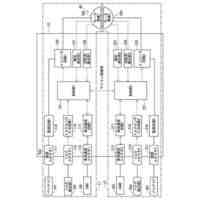
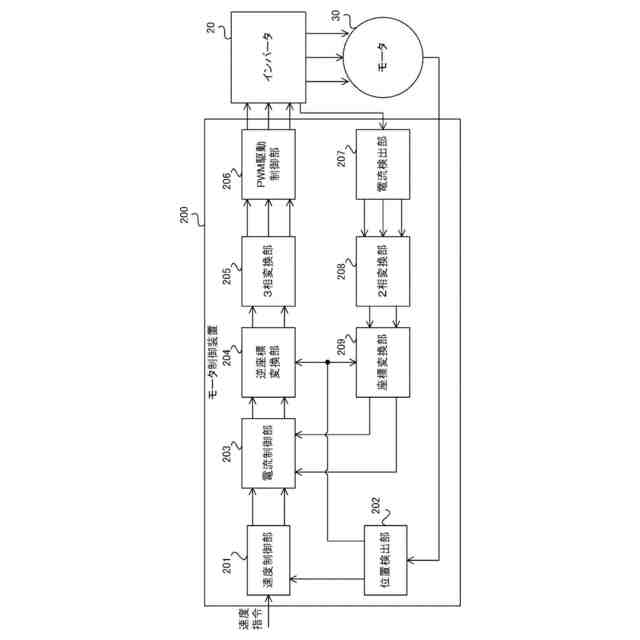
第1の実施形態に係るブラシレスモータシステムの構成の一例を示すブロック図である。
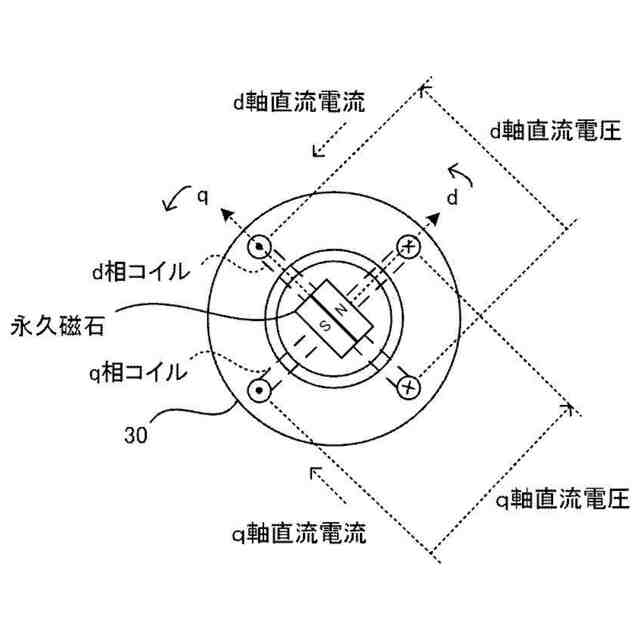
実施形態に係るブラシレスモータのd軸及びq軸の関係を模式的に示す図である。
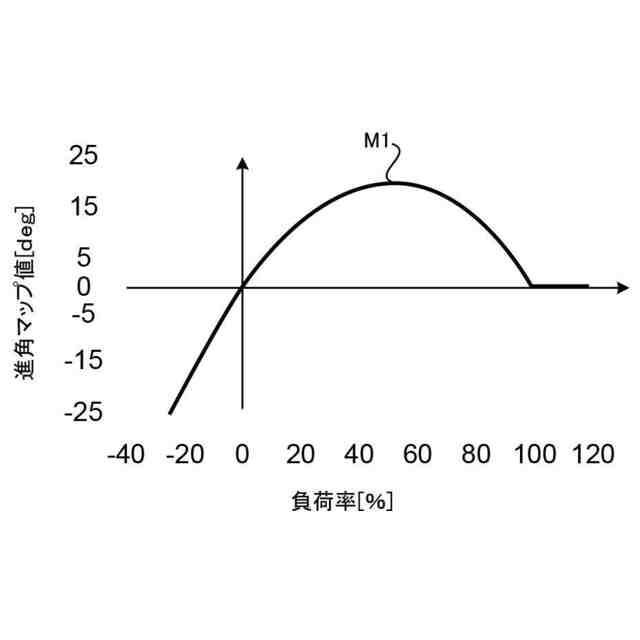
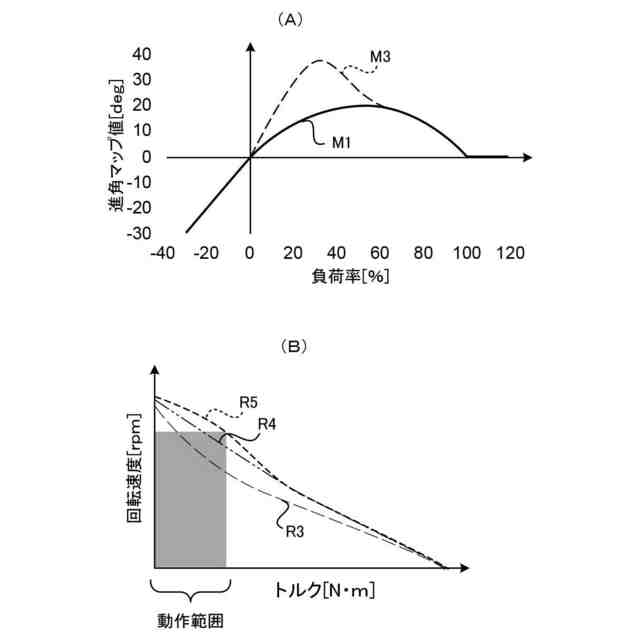
実施形態に係る進角マップ及び進角マップ値の設定例を示すグラフである。
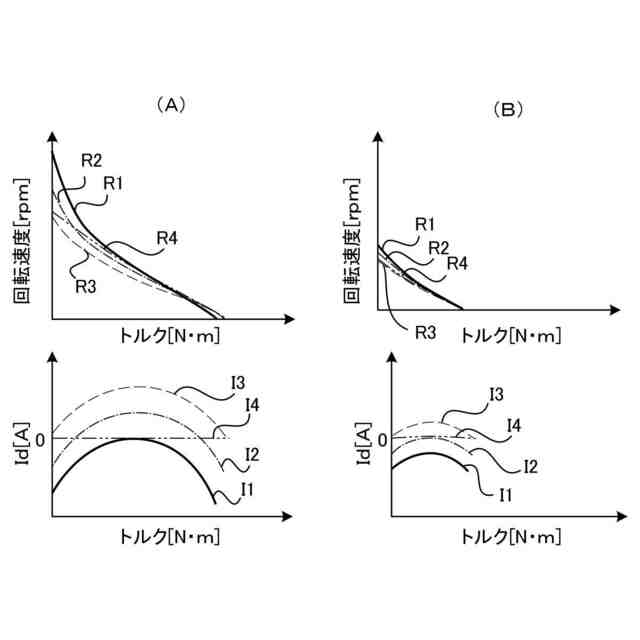
(A)はモータ印加電圧Va=Vsのときのブラシレスモータの回転速度とトルクとの関係及びd軸電流とトルクとの関係の一例を示すグラフである。(B)はモータ印加電圧Va=Vs/2のときのブラシレスモータの回転速度とトルクとの関係及びd軸電流とトルクとの関係の一例を示すグラフである。
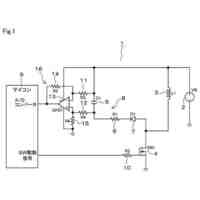
比較例に係るモータ制御装置の構成を示すブロック図である。
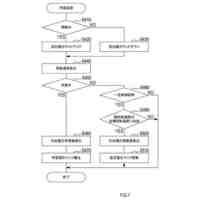
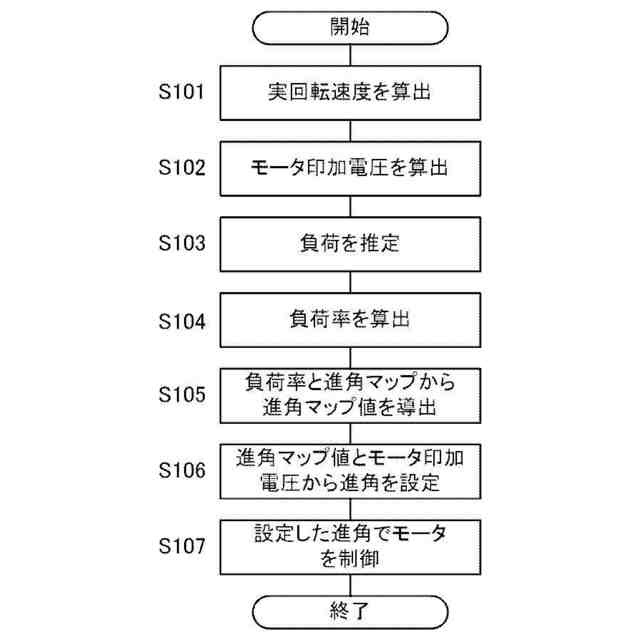
第1の実施形態に係るモータ制御装置による進角制御処理の流れの一例を示すフローチャートである。
(A)はモータ印加電圧Va=Vsのときのブラシレスモータの進角マップの別の設定例を示すグラフである。(B)はモータ印加電圧Va=Vsのときのブラシレスモータの回転速度とトルクとの関係の別の例を示すグラフである。
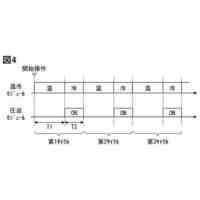
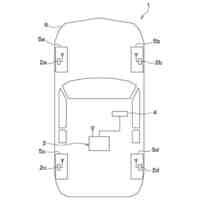
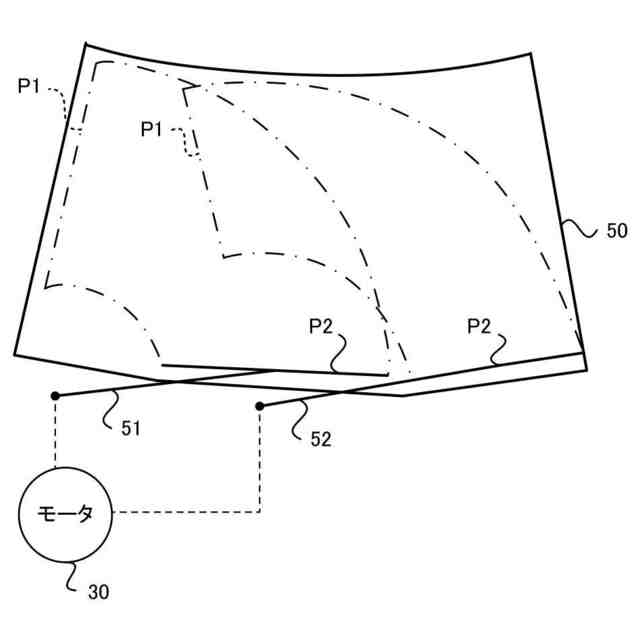
フロントガラスに設けられたワイパアームの上反転位置及び下反転位置の一例を模式的に示す図である。
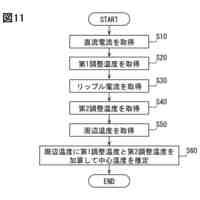
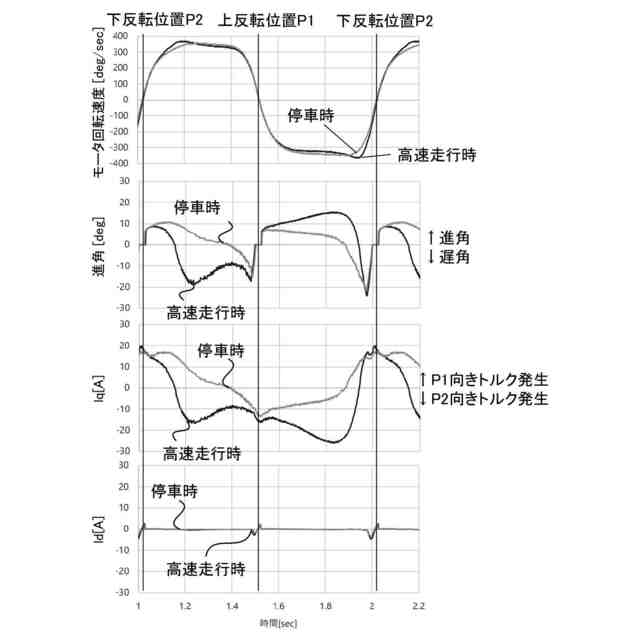
ワイパアームの上反転位置及び下反転位置におけるワイパモータ回転速度、進角、q軸電流及びd軸電流のシミュレーション結果を示すグラフである。
第2の実施形態に係るモータ制御装置による進角制御処理の流れの一例を示すフローチャートである。
(A)は負荷と進角補正値を関係付けた補正値テーブルの一例を示す図である。(B)は進角マップ値と回転速度を関係付けた進角マップの一例を示す図である。(C)は回転方向と負荷との対応関係の一例を示す図である。
第3の実施形態に係るモータ制御装置による進角制御処理の流れの一例を示すフローチャートである。
第4の実施形態に係るモータ制御装置による進角制御処理の流れの一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
変調器
今日
株式会社デンソー
回転子
7日前
株式会社デンソー
電子装置
7日前
株式会社デンソー
駆動回路
1日前
株式会社デンソー
光学部材
8日前
株式会社デンソー
光学部材
13日前
株式会社デンソー
電力変換器
13日前
株式会社デンソー
半導体装置
14日前
株式会社デンソー
レーダ装置
7日前
株式会社デンソー
半導体装置
7日前
株式会社デンソー
半導体装置
14日前
株式会社デンソー
半導体装置
今日
株式会社デンソー
輻射ヒータ
7日前
株式会社デンソー
半導体装置
2日前
株式会社デンソー
電磁継電器
7日前
株式会社デンソー
慣性センサ
7日前
株式会社デンソー
レーダ装置
7日前
株式会社デンソー
電力変換装置
7日前
株式会社デンソー
異常検出装置
今日
株式会社デンソー
電力変換装置
7日前
株式会社デンソー
血流促進装置
今日
株式会社デンソー
負荷駆動装置
2日前
株式会社デンソー
車両用空調装置
7日前
株式会社デンソー
ガスセンサ素子
7日前
株式会社デンソーウェーブ
コードスキャナ
13日前
株式会社デンソー
電流値算出装置
14日前
株式会社デンソー
コンデンサ装置
7日前
株式会社デンソー
コンデンサ装置
今日
株式会社デンソー
電源コントローラ
13日前
株式会社デンソー
回転電機制御装置
2日前
株式会社デンソー
車輪位置検出装置
今日
株式会社デンソー
カメラモジュール
14日前
株式会社デンソー
開閉部材制御装置
7日前
株式会社デンソー
弾性リング組付装置
1日前
株式会社デンソー
LiDAR送受信機
2日前
株式会社デンソー
タイミング判定装置
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ