TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024173043
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023091162
出願日
2023-06-01
発明の名称
開閉部材制御装置
出願人
株式会社デンソー
代理人
名古屋国際弁理士法人
主分類
E05F
15/695 20150101AFI20241205BHJP(錠;鍵;窓または戸の付属品;金庫)
要約
【課題】起動制御の種類によらず安定した速度一定制御を実現する技術を提供する。
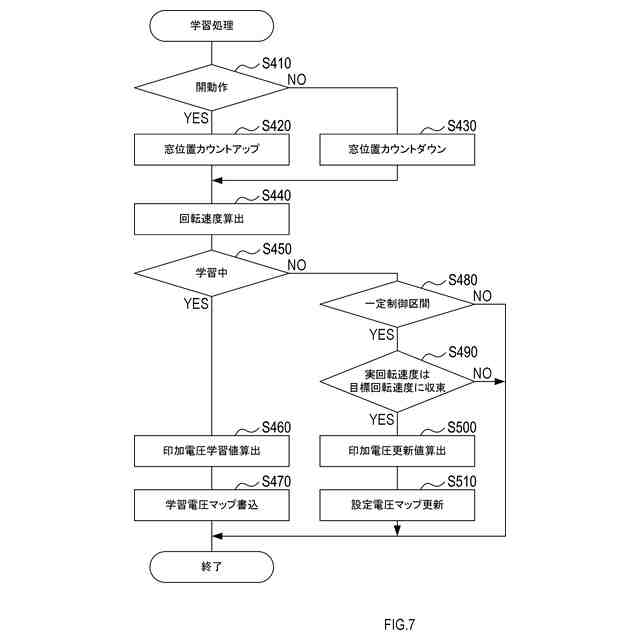
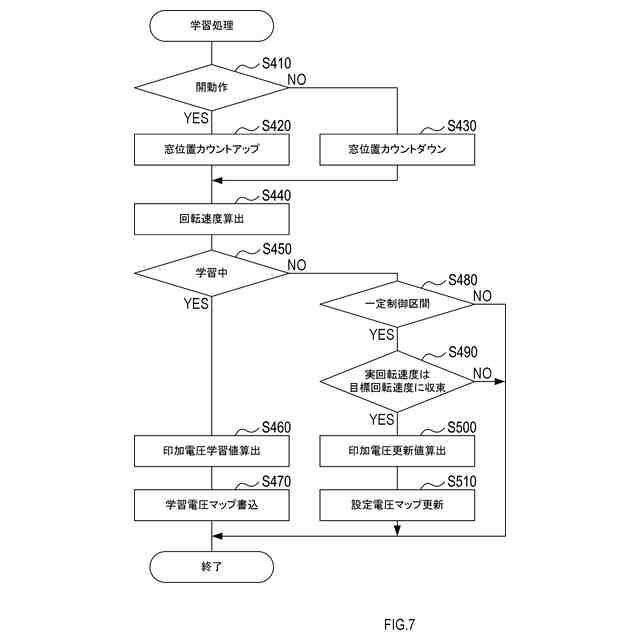
【解決手段】ドアECUの制御部は、S410~S440では、車両に設けられたウィンドウガラスを自動開閉するモータの回転を検出するセンサからの検出信号に基づいて、ウィンドウガラスの位置及び移動速度を検出する。制御部は、S480~S510では、ウィンドウガラスの位置が速度一定制御を実行する区間にあることが検出され、且つ、ウィンドウガラスの移動速度が目標速度に収束していることが検出された場合に、検出される移動速度と目標速度とのずれに基づいて算出される電圧マップの学習値を更新する。
【選択図】図7
特許請求の範囲
【請求項1】
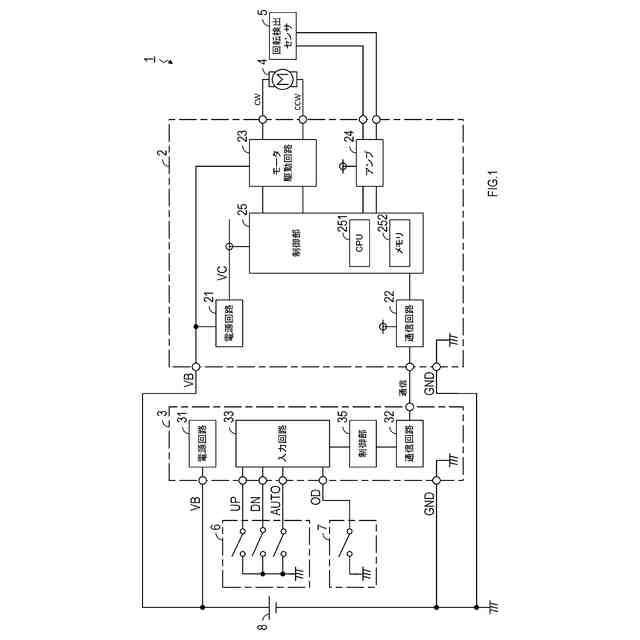
車両に設けられた開閉体を自動開閉するモータの回転を検出するセンサからの検出信号に基づいて、前記開閉体の位置及び移動速度を検出するように構成された状態検出部(25:S410~S440)と、
前記開閉体の位置と対応づけて、前記開閉体を一定の目標速度で動作させるのに必要な前記モータの印加電圧の学習値を示した電圧マップを記憶するように構成されたマップ記憶部(252)と、
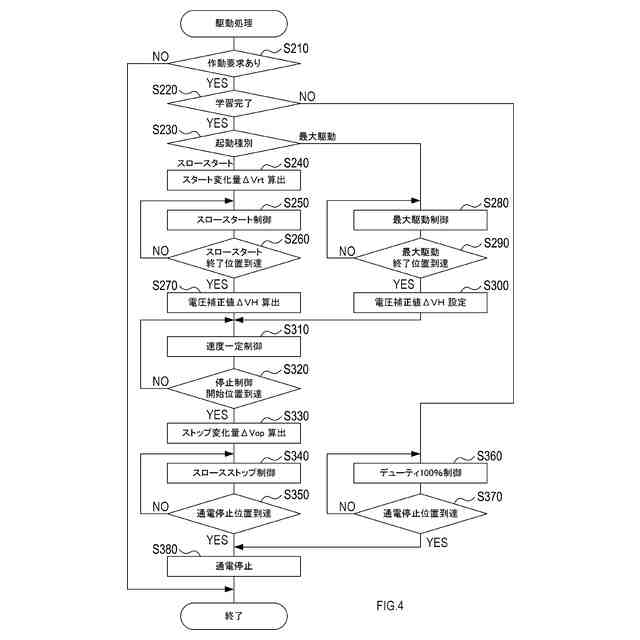
起動制御及び速度一定制御を少なくとも実行することで、指定された速度パターンで前記開閉体が移動するように、前記状態検出部で検出される前記開閉体の位置及び移動速度、並びに前記電圧マップを用いて、前記モータの印加電圧を制御する駆動信号を生成するように構成された信号生成部(25:S210~S380)と、
前記速度一定制御を行っているときに、前記状態検出部で検出される前記移動速度と前記目標速度とのずれを検出して、前記電圧マップの前記学習値を更新するように構成された更新部(25:S480~S510)と、
を備え、
前記更新部は、前記開閉体の位置が前記速度一定制御を実行する区間にあることが検出され、且つ、前記開閉体の移動速度が前記目標速度に収束していることが検出された場合に、前記学習値の更新を開始するように構成され、
前記起動制御は、前記開閉体の移動開始時に実施される制御であり、
前記速度一定制御は、前記起動制御の後に実施され、前記電圧マップに従って前記開閉体を前記目標速度で移動させる制御である、
開閉部材制御装置。
続きを表示(約 250 文字)
【請求項2】
請求項1に記載の開閉部材制御装置であって、
前記起動制御は、前記起動制御が実施される区間の長さ、及び前記起動制御の終了時における前記開閉体の移動速度のうち少なくとも一つが互いに異なる複数種類が存在する
開閉部材制御装置。
【請求項3】
請求項2に記載の開閉部材制御装置であって、
前記起動制御は、前記開閉体の移動速度を一定の割合で増大させるスロースタート制御と、前記開閉体を、最大駆動力で駆動する最大駆動制御とを含む
開閉部材制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、開閉部材をモータによって駆動制御する技術に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
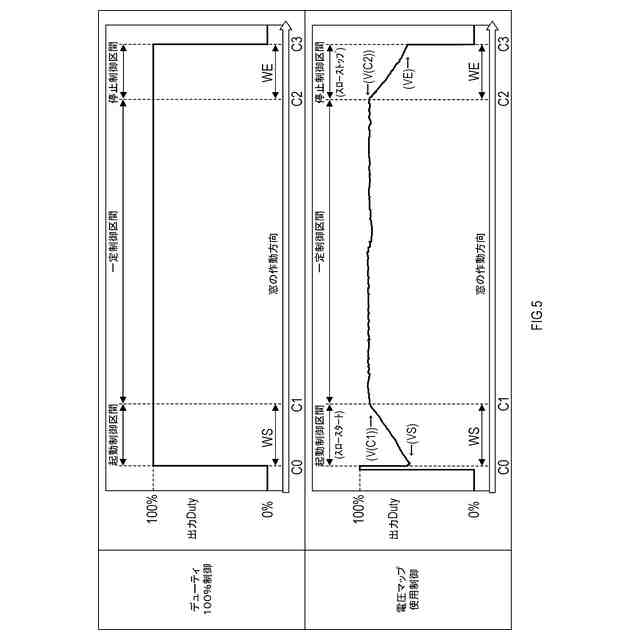
下記特許文献1には、パワーウィンドウシステムにおいて、作動開始時にスロースタート制御、作動終了時にスローストップ制御、スロースタート制御とスローストップ制御との間では速度一定制御を実施することが記載されている。
【0003】
スロースタート制御では、モータを駆動する駆動信号のデューティを、一定の割合で増大させることで、モータの印加電圧、ひいてはモータによって駆動されるウィンドウガラス(以下、開閉体)の移動速度を目標速度まで一定の割合で増大させる。同様に、スローストップ制御では、モータを駆動する駆動信号のデューティを、一定の割合で減少させることで、モータの印加電圧、ひいてはモータによって駆動される開閉体の移動速度を一定の割合で減少させる。
【0004】
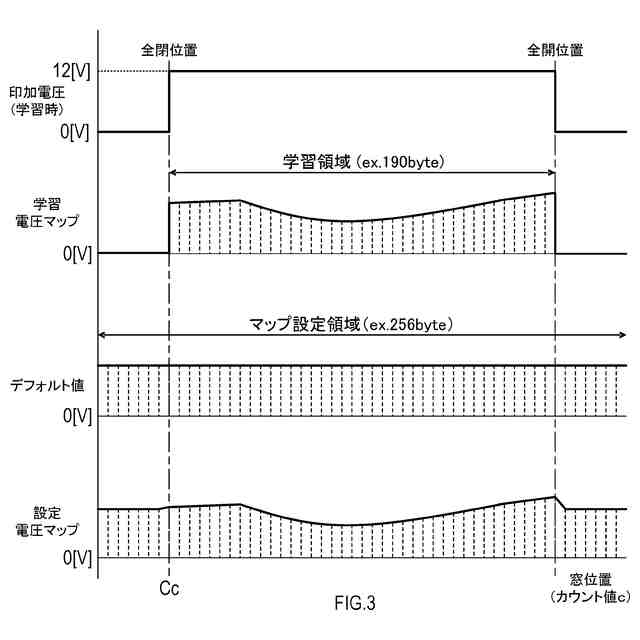
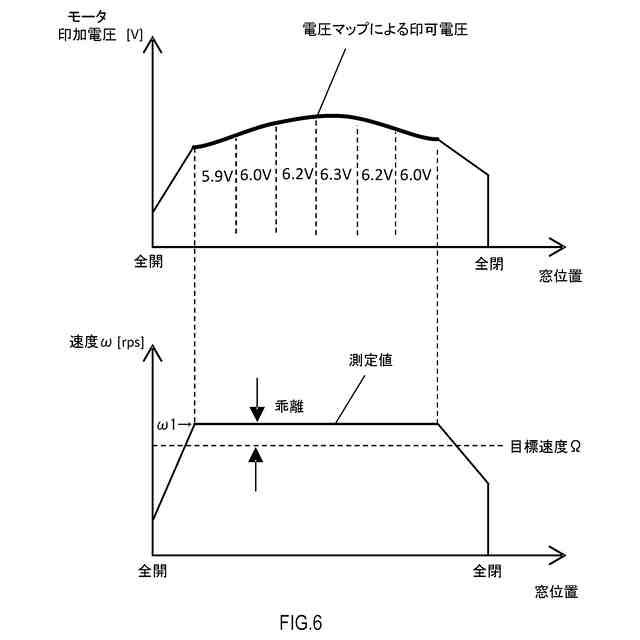
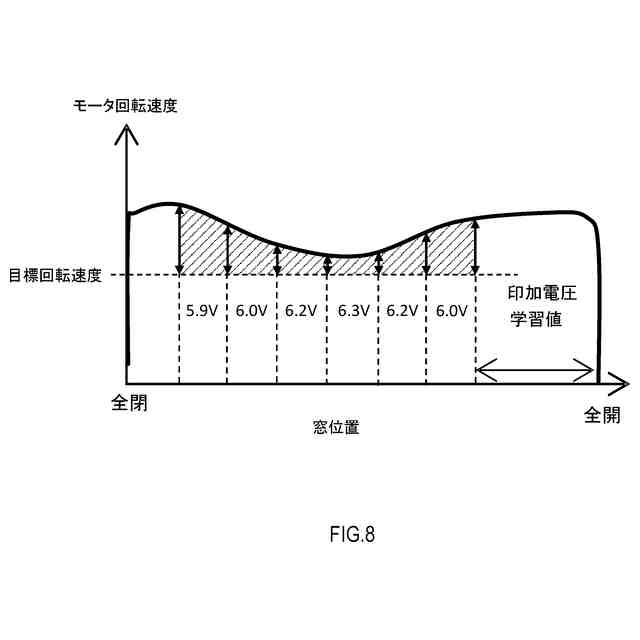
速度一定制御では、開閉体の移動速度を一定にするのに必要な制御値(すなわち、モータの印加電圧)を、開閉体の位置に対応づけて学習した電圧マップを使用して制御を行う。なお、電圧マップの学習値は、速度一定制御が行われる毎に更新される。
【先行技術文献】
【特許文献】
【0005】
特開2022-41648号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
パワーウィンドウシステムにおける作動開始時の制御(以下、起動制御)は、スロースタート制御だけでなく、開閉体を全閉状態から速やかに下降させるために最大駆動力で駆動する最大駆動制御を行うことがある。最大駆動制御は、例えば、ハードトップ車のドア開時に、窓干渉を避けるために行われる。
【0007】
そして、発明者らの検討の結果、起動制御が複数種類存在する場合、電圧マップが誤学習されてしまうという課題が見いだされた。
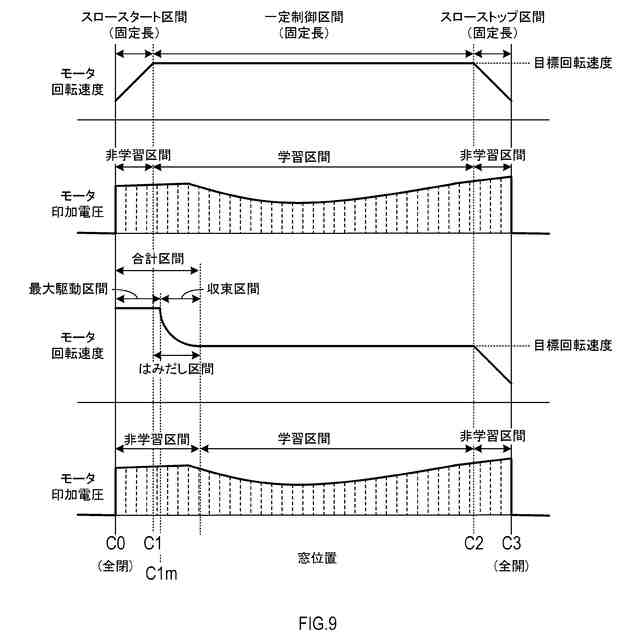
すなわち、スロースタート制御では、スロースタート区間の終了時に一定制御区間での目標速度と一致するように制御される。これに対して最大駆動制御では、目標速度より高い速度となるように制御される。従って、最大駆動制御が行われる区間である最大駆動区間における開閉体の移動速度は目標速度とは乖離しており、最大駆動区間の終了後も、開閉体の移動速度が目標速度に収束するまでに時間を要する。
【0008】
つまり、図10に示すように、最大駆動区間及び収束に要する区間が、一定制御区間にはみ出している場合、このはみだし区間では、目標速度から乖離した実速度が、速やかに目標速度と一致するように、減速を強化する方向で学習値の更新が行われる。
【0009】
このため、最大駆動制御による学習値の更新が行われた後に、スロースタート制御が実行され、その後、速度一定制御が開始されると、目標速度より低い速度となるように制御されてしまう。
【0010】
なお、はみだし区間が生じないように、スロースタート区間及び最大駆動区間を設定することも考えられるが、この場合、スロースタート区間が必要以上に長くなったり、最大駆動区間を十分に確保できなかったりする可能性があった。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ