TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024172370
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023090039
出願日
2023-05-31
発明の名称
車両の制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
H02P
23/06 20160101AFI20241205BHJP(電力の発電,変換,配電)
要約
【課題】損失増加制御の開始又は終了に伴って電池の保護出力を一時的に超過することを抑制できるようにする。
【解決手段】車両の制御装置は、電池と、電池からの電力により作動する電動機を含むパワートレーンと、を備える車両を制御する。制御装置による電動機のトルク制御は、第1のトルク制御と、第1のトルク制御の実行時と比べて電動機の駆動効率が低下するように進角した電流位相角で電動機を駆動する第2のトルク制御(損失増加制御)と、を含む。第1のトルク制御から第2のトルク制御に遷移するために電流位相角を進角させる場合、制御装置は、電流位相角を基準値から目標進角値に向けて時間とともに変化させる。また、第2のトルク制御から第1のトルク制御に遷移するために電流位相角を遅角させる場合、制御装置は、電流位相角を目標進角値から基準値に向けて時間とともに変化させる。
【選択図】図3
特許請求の範囲
【請求項1】
電池と、前記電池からの電力により作動する電動機を含むパワートレーンと、を備える車両を制御する制御装置であって、
前記制御装置による前記電動機のトルク制御は、第1のトルク制御と、前記第1のトルク制御の実行時と比べて前記電動機の駆動効率が低下するように進角した電流位相角で前記電動機を駆動する第2のトルク制御と、を含み、
前記第1のトルク制御から前記第2のトルク制御に遷移するために前記電流位相角を進角させる場合、前記電流位相角を基準値から目標進角値に向けて時間とともに変化させ、
前記第2のトルク制御から前記第1のトルク制御に遷移するために前記電流位相角を遅角させる場合、前記電流位相角を前記目標進角値から前記基準値に向けて時間とともに変化させる
ことを特徴とする車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1は、モータ駆動システムを開示している。このモータ駆動システムは、交流モータでの電力損失を増加させて余剰電力を消費させる制御(損失増加制御)を実行可能に構成されている。電力損失の増加は、交流モータの駆動効率が低下するように電流位相角を進角させることによって行われる。
【先行技術文献】
【特許文献】
【0003】
特開2007-151336号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
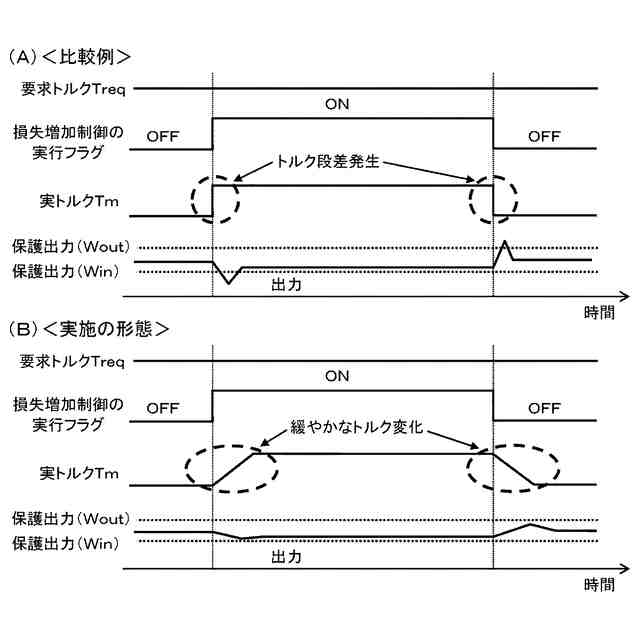
特許文献1に記載のような損失増加制御(本開示に係る「第2のトルク制御」に相当)への(又は、からの)トルク制御の遷移に伴い、電動機の要求トルクに対するトルク差(段差)が実トルクに発生する。その結果、電動機の実パワー(電池のパワー)に対しても、要求パワーに対するパワー差が生じてしまう。高出力領域においてこのような急なトルク差が発生すると、電池の保護出力(入出力制限Win、Wout)を一時的に超過するおそれがある。
【0005】
本開示は、上述のような課題に鑑みてなされたものであり、損失増加制御の開始又は終了に伴って電池の保護出力を一時的に超過することを抑制できる車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る車両の制御装置は、電池と、電池からの電力により作動する電動機を含むパワートレーンと、を備える車両を制御する。制御装置による電動機のトルク制御は、第1のトルク制御と、第1のトルク制御の実行時と比べて電動機の駆動効率が低下するように進角した電流位相角で電動機を駆動する第2のトルク制御と、を含む。第1のトルク制御から第2のトルク制御に遷移するために電流位相角を進角させる場合、制御装置は、電流位相角を基準値から目標進角値に向けて時間とともに変化させる。また、第2のトルク制御から第1のトルク制御に遷移するために電流位相角を遅角させる場合、制御装置は、電流位相角を目標進角値から基準値に向けて時間とともに変化させる。
【発明の効果】
【0007】
本開示によれば、第1のトルク制御と第2のトルク制御との間でのトルク制御の切り替えの際に、電動機に指令される電流位相角を緩やかに変化させることで、電動機の実トルクの急な変化が抑制される。その結果、電池の保護出力を一時的に超過することを抑制できる。
【図面の簡単な説明】
【0008】
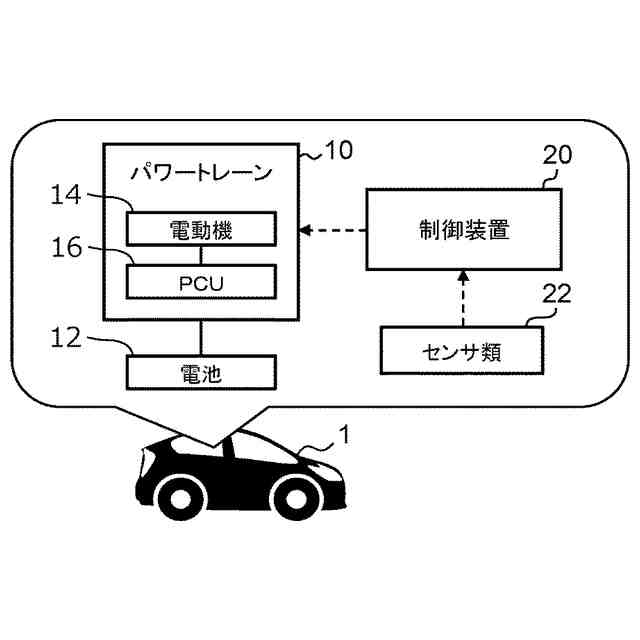
実施の形態に係る車両の構成の一例を概略的に示す図である。
比較例におけるトルク制御の切り替えに関連する動作を表したタイムチャート(A)と、実施の形態におけるトルク制御の切り替えに関連する動作を表したタイムチャート(B)である。
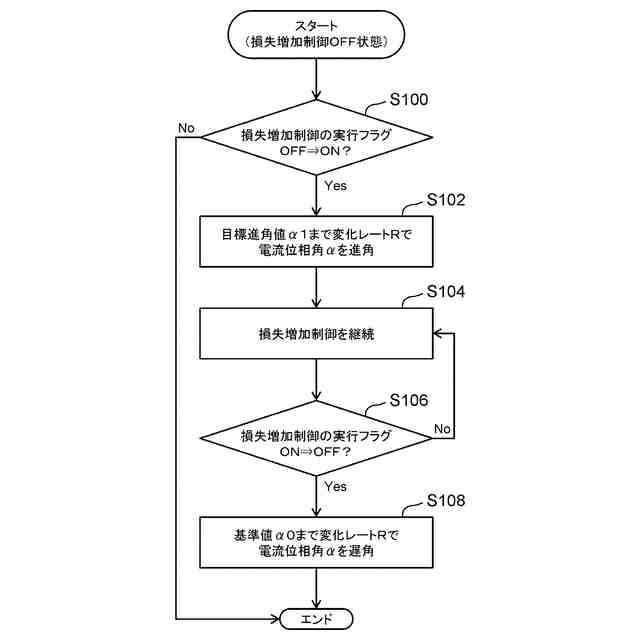
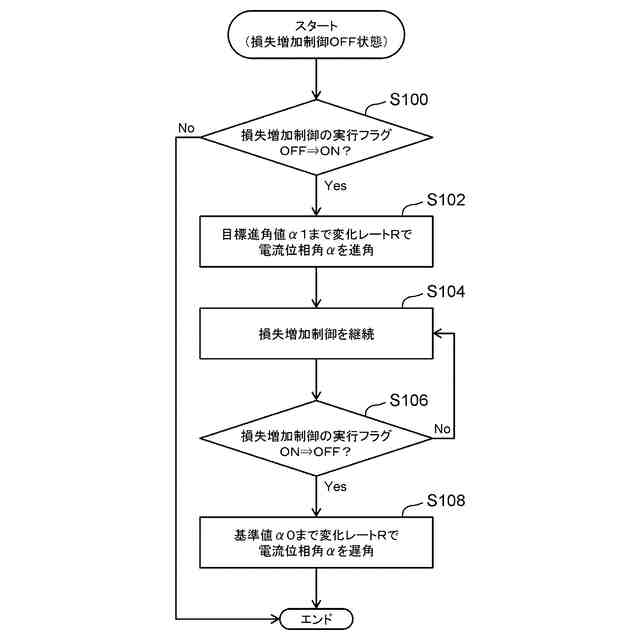
実施の形態に係るトルク制御の切り替えに関する処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
添付図面とともに本開示の実施の形態を説明する。
【0010】
1.車両の構成
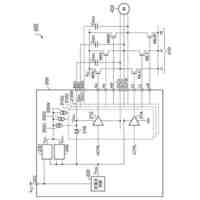
図1は、実施の形態に係る車両1の構成の一例を概略的に示す図である。車両1は、パワートレーン10と、電池12と、制御装置20と、センサ類22とを備える。車両1は、ハイブリッド電気自動車(HEV)又はバッテリ電気自動車(BEV)等の電動車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
電気を重力で発電装置
1か月前
個人
高圧電気機器の開閉器
18日前
キヤノン電子株式会社
モータ
1か月前
キヤノン電子株式会社
モータ
1か月前
トヨタ自動車株式会社
モータ
1か月前
株式会社アイドゥス企画
減反モータ
18日前
株式会社デンソー
端子台
11日前
株式会社デンソー
回転電機
2日前
株式会社ダイヘン
送配電装置
2日前
富士電機株式会社
電力変換装置
2日前
本田技研工業株式会社
回転電機
4日前
株式会社不二越
空冷式油圧装置
2日前
富士電機株式会社
電力変換装置
2日前
ローム株式会社
半導体集積回路
9日前
矢崎総業株式会社
電源回路
17日前
矢崎総業株式会社
給電装置
10日前
株式会社TMEIC
制御装置
10日前
株式会社日立製作所
回転電機
9日前
大和ハウス工業株式会社
敷設用機器
10日前
トヨタ自動車株式会社
ステータの製造装置
1か月前
個人
非対称鏡像力を有する4層PWB電荷搬送体
25日前
ローム株式会社
モータドライバ回路
25日前
日産自動車株式会社
ロータシャフト
25日前
日産自動車株式会社
ロータシャフト
25日前
株式会社イノコンバンク
無線給電システム
2日前
個人
電線盗難防止方法及び電線盗難防止装置
1か月前
サンデン株式会社
モータ
3日前
株式会社TMEIC
電力変換装置
10日前
株式会社土井製作所
ケーブル保護管路
9日前
株式会社アイシン
電力変換装置
1か月前
京商株式会社
模型用非接触電力供給システム
18日前
サンデン株式会社
モータ
3日前
株式会社マキタ
電動作業機
1か月前
トヨタ自動車株式会社
可変界磁ロータ
1か月前
トヨタ自動車株式会社
熱利用回路
11日前
ジヤトコ株式会社
治具
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ