TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024171194
公報種別
公開特許公報(A)
公開日
2024-12-11
出願番号
2023088143
出願日
2023-05-29
発明の名称
物体検知装置、物体検知方法およびプログラム
出願人
日本電気株式会社
代理人
個人
,
個人
主分類
G01S
13/28 20060101AFI20241204BHJP(測定;試験)
要約
【課題】物体検知装置において、効率よく高精度な距離および速度推定が可能な技術を提供する。
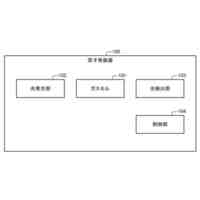
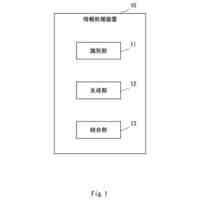
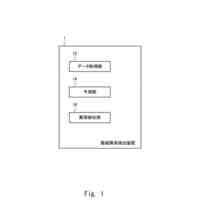
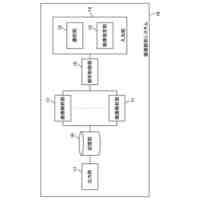
【解決手段】物体検知装置は、当該目標物体に送信し、反射されたデジタル符号変調させた複数の送信パルス信号を受信し、受信信号を生成する送受信部と、受信信号に対し信号処理を施し、目標物体を検出する演算部と、を備え、演算部は、目標物体の複数の速度候補それぞれを用いて、受信信号のドップラシフトを補正するドップラシフト補正を行い、ドップラシフト補正後の受信信号に対しパルス圧縮を行い、速度候補毎の第一出力信号を生成するパルスドップラフィルタバンク処理部と、速度アンビギュイティを折り返し方向の隣接ビンに配置するよう第一出力信号を変形し、第二出力信号を生成する配列形状変更処理部と、第二出力信号から目標物体を検出する目標検出処理部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
自装置に対して相対運動する目標物体にデジタル符号変調させた複数の送信パルス信号を送信するとともに、当該目標物体で反射された前記複数の送信パルス信号を受信し、受信信号を生成する送受信部と、
前記受信信号に対し信号処理を施し、前記目標物体を検出する演算部と、を備え、
前記演算部は、
前記目標物体の複数の速度候補それぞれを用いて、前記受信信号のドップラシフトを補正するドップラシフト補正を行い、ドップラシフト補正後の前記受信信号に対しパルス圧縮を行い、前記速度候補毎の第一出力信号を生成するパルスドップラフィルタバンク処理部と、
速度アンビギュイティを折り返し方向の隣接ビンに配置するよう前記第一出力信号を変形し、第二出力信号を生成する配列形状変更処理部と、
前記第二出力信号から前記目標物体を検出する目標検出処理部と、を備える物体検知装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1記載の物体検知装置であって、
前記パルスドップラフィルタバンク処理部は、前記受信信号のヒット毎に前記ドップラシフト補正および前記パルス圧縮を行った後、積分し、前記第一出力信号を生成する、物体検知装置。
【請求項3】
請求項1記載の物体検知装置であって、
前記配列形状変更処理部は、
前記速度候補それぞれによるグローバルドップラ周波数を、パルス繰り返し周波数(PRF)で除算した際の商である折り返し数と余りであるローカルドップラ周波数とに分解することにより、前記第一出力信号を変形する物体検知装置。
【請求項4】
請求項3記載の物体検知装置であって、
前記目標検出処理部は、予め定めた閾値以上の信号値を有する前記第二出力信号の、前記ローカルドップラ周波数および前記繰り返し数方向の次元から、前記目標物体の速度を算出する、物体検知装置。
【請求項5】
請求項1記載の物体検知装置であって、
前記第一出力信号および前記第二出力信号は、各送信パルス信号に対応する送信信号が送信された時刻からの経過時間であるファストタイム方向の次元を有する信号であり、
前記目標検出処理部は、予め定めた閾値以上の信号値を有する前記第二出力信号の、前記ファストタイム方向の次元の信号から前記目標物体の距離を算出する、物体検知装置。
【請求項6】
請求項1記載の物体検知装置であって、
前記送信パルス信号を重畳する搬送波は、電波である物体検知装置。
【請求項7】
物体検知装置のコンピュータによって実行される物体検知方法であって、
目標物体の複数の速度候補それぞれを用いて、受信信号のドップラシフトを補正するドップラシフト補正を行い、ドップラシフト補正後の前記受信信号に対しパルス圧縮を行い、前記速度候補毎の第一出力信号を生成するパルスドップラフィルタバンク処理ステップと、
速度アンビギュイティを折り返し方向の隣接ビンに配置するよう前記速度候補を変形し、第二出力信号を生成する配列形状変更処理ステップと、
前記第二出力信号から前記目標物体を検出する目標検出処理ステップと、を備え、
前記目標物体は、前記物体検知装置に対して相対運動し、
前記受信信号は、当該目標物体に送信したデジタル符号変調させた複数の送信パルス信号が、当該目標物体で反射された信号から生成される、物体検知方法。
【請求項8】
物体検知装置のコンピュータに、
前記物体検知装置に対して相対運動する目標物体の複数の速度候補それぞれを用いて、当該目標物体に送信したデジタル符号変調させた複数の送信パルス信号が、当該目標物体で反射された信号から生成される受信信号のドップラシフトを補正するドップラシフト補正を行い、ドップラシフト補正後の前記受信信号に対しパルス圧縮を行い、前記速度候補毎の第一出力信号を生成するパルスドップラフィルタバンク処理手順と、
速度アンビギュイティを折り返し方向の隣接ビンに配置するよう前記速度候補を変形し、第二出力信号を生成する配列形状変更処理手順と、
前記第二出力信号から前記目標物体を検出する目標検出処理手順と、を実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物体検知装置、物体検知方法およびプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
電磁波等を用いて目標物体を検知する物体検知装置がある。このうち、電波を用いるものをレーダ装置と呼ぶ。一般に、レーダ装置は、空間に電波を発射して、目標物体で反射した反射信号を受信することで目標の存在を探知し、その位置、運動状況などを観測する。発射する電波は、一定の幅を持つ矩形波(パルス)であり、以下、電波パルスと呼ぶ。
【0003】
電波パルスを照射するレーダ装置において、目標の速度を推定する方法には、主に以下の2つの方式がある。
(1)ドップラ周波数を利用する方式(第一方式)
(2)アップチャープとダウンチャープとの測距差を利用する方式(第二方式)
【0004】
第一方式は、ドップラ周波数と、既知である送信周波数および光速とから、目標物体の速度を得る方式である。ドップラ周波数は、複数の電波パルスを照射し、目標物体で反射した複数の電波パルスを受信し、受信した複数の電波パルスを、レンジビン毎にヒット方向にフーリエ変換することで算出する。第一方式の長所は精度が高いことである。しかし、電波パルスの照射の時間間隔であるパルス繰り返し周期(PRI:Pulse Repetition Interval)が長い場合、各ヒット間の位相回転量にアンビギュイティが生じ、それに起因して推定速度にもアンビギュイティが生じることが短所である。
【0005】
第二方式は、周波数が高くなる方向に線形に周波数変調させるアップチャープの電波パルスを用いて得た測距結果と、周波数が低くなる方向に線形に周波数変調させるダウンチャープの電波パルスを用いて得た測距結果との差を用いて目標物体の速度を得る方式である。線形周波数変調を用いて測距する場合、ドップラシフトの影響により測距結果が真値からずれる。このとき、ずれる向きはアップチャープとダウンチャープとで逆になることが知られている。これを利用し、アップチャープの測距結果とダウンチャープの測距結果との差分を目標の速度に換算する。第二方式の長所は推定速度にアンビギュイティがないことである。ただし、第二方式は、測距結果の差分を算出する前に、アップチャープとダウンチャープの測距結果を、目標物体毎に対応付けを行う必要がある。しかしながら、近接する複数の目標物体が存在する場合、対応付けを誤りやすく、その結果、測距精度および速度推定精度が劣化しやすいことが短所である。
【0006】
これらを踏まえ、アンビギュイティがなく、かつ、精度が高い速度推定方式が、例えば特許文献1において開示されている。
【先行技術文献】
【特許文献】
【0007】
特開2005-83867号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
以下の分析は、本発明によって与えられたものである。
【0009】
特許文献1に開示の方式では、上記第一方式と第二方式とを融合させることで、それぞれの長所を残したまま、それぞれの短所のみを改善する。しかしながら、この方式では、アップチャープとダウンチャープのそれぞれで目標物体を2度探知する必要がある。ヒット数がNで一度のみ目標を探知する方式と比較すると、観測時間を同一とした条件においては、アップチャープとダウンチャープのそれぞれはN/2ヒットで目標を探知する必要があるため、探知能力が劣化する。一方、探知能力を同一とした条件においては、アップチャープとダウンチャープのそれぞれはNヒットで目標を探知する必要があるため、2倍の観測時間が必要となり、レーダの時間リソースを2倍消費する。
【0010】
このように、電波パルスを用いるレーダ装置(パルスレーダ装置)等の物体検知装置において、探知能力を劣化させたり、レーダの消費リソースを増やしたりすることなく、距離および速度のアンビギュイティなしに、精度の高い距離推定(測距)および速度推定が望まれている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
原子発振器
6日前
日本電気株式会社
量子デバイスおよびその製造方法
13日前
日本電気株式会社
異常予兆判定装置および異常予兆判定方法
6日前
日本電気株式会社
情報処理装置、情報処理方法、及びプログラム
13日前
日本電気株式会社
検索支援装置、検索支援方法、およびプログラム
10日前
日本電気株式会社
関係抽出装置、関係抽出方法、およびプログラム
今日
日本電気株式会社
情報処理装置、データ生成方法、及びプログラム
10日前
日本電気株式会社
監視装置、監視方法およびコンピュータプログラム
7日前
日本電気株式会社
量子デバイス、発振周波数設定方法およびプログラム
6日前
日本電気株式会社
路面異常検出装置、路面異常検出方法及びプログラム
7日前
日本電気株式会社
制御装置、制御システム、制御方法、及び、プログラム
今日
日本電気株式会社
関わり提示装置、関わり提示システム、及び関わり提示方法
7日前
日本電気株式会社
移動体システム、移動体、移動体制御方法およびプログラム
今日
日本電気株式会社
日程調整装置、日程調整システム、日程調整方法およびプログラム
10日前
日本電気株式会社
通信品質監視装置、通信品質監視方法、及び、通信品質監視プログラム
6日前
日本電気株式会社
光伝送路監視装置、光伝送路監視方法、及び、光伝送路監視プログラム
13日前
日本電気株式会社
情報処理端末、情報処理プログラム、情報処理方法、及び情報処理システム
6日前
日本電気株式会社
情報共有装置、情報共有システム、情報共有方法および情報共有プログラム
10日前
日本電気株式会社
ファイバ素線固定構造、光海底中継器、及びファイバ素線固定構造の組立方法
10日前
日本電気株式会社
分散再暗号化装置、暗号システム、分散再暗号化方法、分散再暗号化プログラム
6日前
日本電気株式会社
プログラム及び飛行体制御方法
7日前
日本電気株式会社
検索装置、検索方法、及びプログラム
7日前
日本電気株式会社
プログラム、追跡方法、および追跡装置
6日前
日本電気株式会社
端末デバイスの方法、及び端末デバイス
2日前
日本電気株式会社
店舗システム、処理方法及びプログラム
2日前
日本電気株式会社
デバイス、表示方法、およびプログラム
10日前
日本電気株式会社
通信方法、端末装置及びネットワーク装置
2日前
日本電気株式会社
情報処理システム、情報処理端末、情報処理装置、情報処理方法、及び、情報処理プログラム
13日前
日本電気株式会社
監視装置、監視システム、方法、及びプログラム
7日前
日本電気株式会社
画像解析システム、プログラム及び画像解析方法
8日前
日本電気株式会社
動作検出システム、動作検出方法、及びプログラム
今日
日本電気株式会社
情報処理装置、情報処理方法及び情報処理プログラム
今日
日本電気株式会社
料金徴収装置、料金徴収方法及びコンピュータプログラム
10日前
日本電気株式会社
表示制御装置、表示制御方法およびコンピュータプログラム
10日前
日本電気株式会社
視線推定システム、視線推定方法、及びコンピュータプログラム
2日前
日本電気株式会社
デブリ除去システム、ステーション衛星、デブリ除去衛星、地上制御装置、デブリ除去方法、制御方法、プログラム
6日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ