TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024165399
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023081570
出願日
2023-05-17
発明の名称
円筒構造体の点検システム
出願人
国立大学法人徳島大学
,
株式会社GEOソリューションズ
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
H04N
23/60 20230101AFI20241121BHJP(電気通信技術)
要約
【課題】 本発明は、円筒構造体の内側面の画像を撮影する点検カメラの撮影高度、撮影方向を求めることのできる円筒構造体の点検システムを提供する。
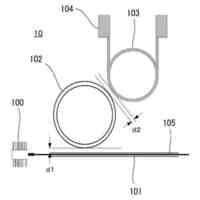
【解決手段】 本発明は、無人飛行体1と、円筒構造体Yλの底面YAに配置される飛行指示体31及び第1乃至第4発光体32~35と、無人飛行体1に搭載される点検カメラ3と、無人飛行体1に搭載される第1及び第2基準カメラ51,52と、位置演算装置5を備える。無人飛行体1は、円筒構造体Yλの内部の空中に停止飛行され、点検カメラ3は、無人飛行体1の停止飛行中に、円筒構造体Yλの内側面Yaの画像を撮影する。ア各基準カメラ51,52は、飛行指示体31及び各発光体32~35を含む画像を撮影する。位置演算装置5は、点検カメラ3の画像の撮影と同時に、第1又は第2基準カメラ51,52の撮影する画像に基づいて、点検カメラ3の撮影高度及び撮影方向を求める。
【選択図】 図7
特許請求の範囲
【請求項1】
地上に立設される円筒構造体の内部に飛行される無人飛行体と、
前記円筒構造体の内部に配置される発光装置と、
前記無人飛行体に搭載される撮影装置と、
位置演算装置と、を備え、
前記発光装置は、
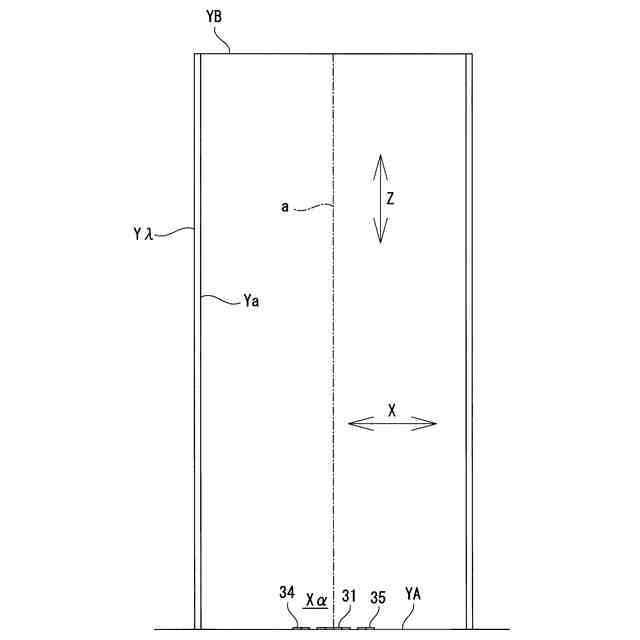
前記円筒構造体の中心に位置して前記円筒構造体の底面に配置され、前記円筒構造体の内部に光を発して、前記無人飛行体の飛行態様を表示する飛行指示体と、
前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間の前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第1発光体と、
前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置される共に、前記第1発光体に対し前記円筒構造体の径方向の第1方向に間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第2発光体と、
前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置されると共に、前記第1発光体に対し前記第1方向と直交する前記円筒構造体の径方向の第2方向に間隔を隔て、前記第2発光体に対し間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第3発光体と、
前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置されると共に、前記第2発光体に対し前記第2方向に間隔を隔て、前記第3発光体に対し前記第1方向に間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第4発光体と、を有し、
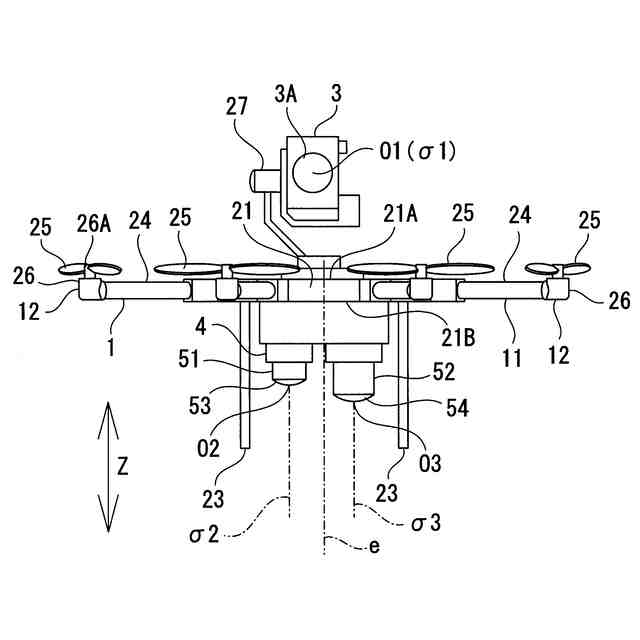
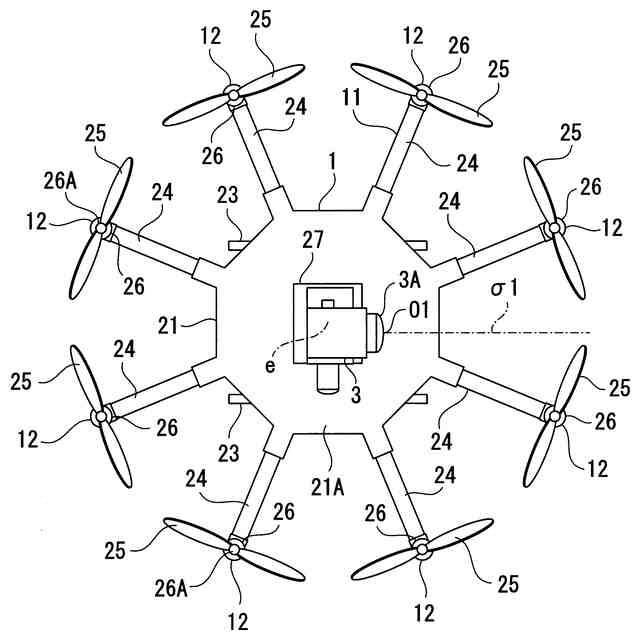
前記撮影装置は、前記無人飛行体に搭載される基準カメラ及び点検カメラを有し、
前記無人飛行体は、前記円筒構造体の内部の空中に停止飛行され、
前記基準カメラは、前記飛行指示体及び各発光体を含む画像を撮影し、
前記点検カメラは、前記無人飛行体の停止飛行中に、前記円筒構造体の内側面の画像を撮影し、
前記位置演算装置は、
前記無人飛行体の停止飛行中に、前記基準カメラの撮影した画像に基づいて、前記点検カメラの撮影高度を求め、
前記点検カメラの撮影と同時に、前記基準カメラの撮影した画像に基づいて、前記点検カメラの撮影方向を求める
ことを特徴とする円筒構造体の点検システム。
続きを表示(約 4,900 文字)
【請求項2】
前記撮影装置は、
前記点検カメラと、
前記無人飛行体に搭載される固定焦点型の第1基準カメラと、
前記無人飛行体に搭載され、前記第1基準カメラよりも焦点距離の長い固定焦点型の第2基準カメラと、
カメラ制御部と、を有し、
前記無人飛行体は、前記円筒構造体の前記底面から離陸されて、前記円筒構造体の内部の空中に停止飛行され、
前記第1又は第2基準カメラは、前記飛行指示体及び前記各発光体を含む画像を撮影し、
前記カメラ制御部は、
前記無人飛行体の離陸開始から前記第1基準カメラの撮影を開始し、
前記第1基準カメラの撮影した前記飛行指示体及び前記各発光体を含む画像の解像度が所定の解像度以下になると、前記第1基準カメラの撮影から前記第2基準カメラの撮影に切替え、
前記位置演算装置は、
前記無人飛行体の停止飛行中に、前記第1又は第2基準カメラの撮影した画像に基づいて、前記点検カメラの撮影高度を求め、
前記点検カメラの撮影と同時に、前記第1又は第2基準カメラの撮影した画像に基づいて、前記点検カメラの撮影方向を求める
ことを特徴とする請求項1記載の円筒構造体の点検システム。
【請求項3】
前記位置演算装置は、
前記点検カメラの撮影と同時に、前記第1又は第2基準カメラの撮影した画像に基づいて、前記点検カメラの撮影高度を求める
ことを特徴とする請求項2に記載の円筒構造体の点検システム。
【請求項4】
前記無人飛行体を遠隔操作する操縦装置を備え、
前記無人飛行体は、
前記無人飛行体の飛行を制御する機体制御部を有し、
前記機体制御部は、
前記操縦装置からの上昇飛行指令に基づいて、前記無人飛行体を前記円筒構造体の前記底面から離陸して、前記円筒構造体の中心線方向に上昇飛行させると共に、
前記第1又は第2基準カメラの撮影した画像の飛行指示体に表示された飛行態様に基づいて、前記無人飛行体の飛行を制御する
ことを特徴とする請求項2又は請求項3に記載の円筒構造体の点検システム。
【請求項5】
地上に立設される円筒構造体の内部に飛行される無人飛行体と、
前記円筒構造体の内部に配置される発光装置と、
前記無人飛行体に搭載される撮影装置と、
位置演算装置と、を備え、
前記発光装置は、
前記円筒構造体の中心に位置して前記円筒構造体の底面に配置され、前記円筒構造体の内部に光を発して、前記無人飛行体の飛行態様を表示する飛行指示体と、
前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間の前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第1発光体と、
前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置される共に、前記第1発光体に対し前記円筒構造体の径方向の第1方向に間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第2発光体と、
前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置されると共に、前記第1発光体に対し前記第1方向と直交する前記円筒構造体の径方向の第2方向に間隔を隔て、前記第2発光体に対し間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第3発光体と、
前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置されると共に、前記第2発光体に対し前記第2方向に間隔を隔て、前記第3発光体に対し前記第1方向に間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第4発光体と、を有し、
前記撮影装置は、前記無人飛行体に搭載される基準カメラ及び点検カメラを有し、
前記無人飛行体は、前記円筒構造体の内部の空中に停止飛行され、
前記基準カメラは、前記飛行指示体及び各発光体を含む画像を撮影し、
前記点検カメラは、前記無人飛行体の停止飛行中に、前記円筒構造体の内側面の画像を撮影し、
前記位置演算装置は、
前記無人飛行体の停止飛行中に、前記基準カメラの撮影した画像に基づいて、前記点検カメラの撮影高度を求める
ことを特徴とする円筒構造体の点検システム。
【請求項6】
地上に立設される円筒構造体の内部に飛行される無人飛行体と、
前記円筒構造体の内部に配置される発光装置と、
前記無人飛行体に搭載される撮影装置と、
位置演算装置と、を備え、
前記発光装置は、
前記円筒構造体の中心に位置して前記円筒構造体の底面に配置され、前記円筒構造体の内部に光を発して、前記無人飛行体の飛行態様を表示する飛行指示体と、
前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間の前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第1発光体と、
前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置される共に、前記第1発光体に対し前記円筒構造体の径方向の第1方向に間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第2発光体と、
前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置されると共に、前記第1発光体に対し前記第1方向と直交する前記円筒構造体の径方向の第2方向に間隔を隔て、前記第2発光体に間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第3発光体と、
前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置されると共に、前記第2発光体に対し前記第2方向に間隔を隔て、前記第3発光体に対し前記第1方向に間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第4発光体と、を有し、
前記撮影装置は、前記無人飛行体に搭載される基準カメラ及び点検カメラを有し、
前記無人飛行体は、前記円筒構造体の内部の空中に停止飛行され、
前記基準カメラは、前記飛行指示体及び各発光体を含む画像を撮影し、
前記点検カメラは、前記無人飛行体の停止飛行中に、前記円筒構造体の内側面を撮影し、
前記位置演算装置は、
前記点検カメラの撮影と同時に、前記基準カメラの撮影した画像に基づいて、前記点検カメラの撮影方向を求める
ことを特徴とする円筒構造体の点検システム。
【請求項7】
前記位置演算装置は、
前記点検カメラの撮影と同時に、前記基準カメラの撮影した画像に基づいて、前記点検カメラの撮影高度を求める
ことを特徴とする請求項1又は請求項5に記載の円筒構造体の点検システム。
【請求項8】
地上に立設される円筒構造体の内部に飛行される無人飛行体と、
前記円筒構造体の内部に配置される発光装置と、
前記無人飛行体に搭載される撮影装置と、
位置演算装置と、を備え、
前記発光装置は、
前記円筒構造体の底面に配置され、前記円筒構造体の内部に光を発する第1発光体と、
前記第1発光体に対し前記円筒構造体の径方向の第1方向に間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第2発光体と、
前記第1発光体に対し前記第1方向と交差する前記円筒構造体の径方向の第2方向に間隔を隔て、前記第2発光体に対し間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第3発光体と、を有し、
前記撮影装置は、前記無人飛行体に搭載される基準カメラ及び点検カメラを有し、
前記無人飛行体は、前記円筒構造体の内部の空中に停止飛行され、
前記基準カメラは、各発光体を含む画像を撮影し、
前記点検カメラは、前記無人飛行体の停止飛行中に、前記円筒構造体の内側面を撮影し、
前記位置演算装置は、
前記無人飛行体の停止飛行中に、前記基準カメラの撮影した画像に基づいて、前記点検カメラの撮影高度を求め、
前記点検カメラの撮影と同時に、前記基準カメラの撮影した画像に基づいて、前記点検カメラの撮影方向を求める
ことを特徴とする円筒構造体の点検システム。
【請求項9】
地上に立設される円筒構造体の内部に飛行される無人飛行体と、
前記円筒構造体の内部に配置される発光装置と、
前記無人飛行体に搭載される撮影装置と、
位置演算装置と、を備え、
前記発光装置は、
前記円筒構造体の底面に配置され、前記円筒構造体の内部に光を発する第1発光体と、
前記第1発光体に対し前記円筒構造体の径方向の第1方向に間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第2発光体と、
前記第1発光体に対し前記第1方向と交差する前記円筒構造体の径方向の第2方向に間隔を隔て、前記第2発光体に対し間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第3発光体と、を有し、
前記撮影装置は、前記無人飛行体に搭載される基準カメラ及び点検カメラを有し、
前記無人飛行体は、前記円筒構造体の内部の空中に停止飛行され、
前記基準カメラは、各発光体を含む画像を撮影し、
前記点検カメラは、前記無人飛行体の停止飛行中に、前記円筒構造体の内側面の画像を撮影し、
前記位置演算装置は、
前記無人飛行体の停止飛行中に、前記基準カメラの撮影した画像に基づいて、前記点検カメラの撮影高度を求める
ことを特徴とする円筒構造体の点検システム。
【請求項10】
地上に立設される円筒構造体の内部に飛行される無人飛行体と、
前記円筒構造体の内部に配置される発光装置と、
前記無人飛行体に搭載される撮影装置と、
位置演算装置と、を備え、
前記発光装置は、
前記円筒構造体の底面に配置され、前記円筒構造体の内部に光を発する第1発光体と、
前記第1発光体に対し前記円筒構造体の径方向の第1方向に間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第2発光体と、
前記第1発光体に対し前記第1方向と交差する前記円筒構造体の径方向の第2方向に間隔を隔て、前記第2発光体に対し間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第3発光体と、を有し、
前記撮影装置は、前記無人飛行体に搭載される基準カメラ及び点検カメラを有し、
前記無人飛行体は、前記円筒構造体の内部の空中に停止飛行され、
前記基準カメラは、各発光体を含む画像を撮影し、
前記点検カメラは、前記無人飛行体の停止飛行中に、前記円筒構造体の内側面の画像を撮影し、
前記位置演算装置は、
前記点検カメラの撮影と同時に、前記基準カメラの撮影した画像に基づいて、前記点検カメラの撮影方向を求める
ことを特徴とする円筒構造体の点検システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
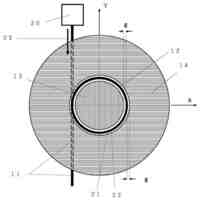
本発明は、無人飛行体に搭載したカメラにて煙突等の円筒構造体の内側面の画像を撮影して、円筒構造体の画像から内側面の状態を点検する円筒構造体の点検システムに関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
煙突を点検する技術として、特許文献1は、無人小型飛行体を用いた点検方法を開示する。無人小型飛行体は、無人小型飛行体に配置されたガイド、及び煙突の内部に設置されたガイドワイヤによって案内されて、煙突の内部に上昇飛行又は降下飛行される。無人小型飛行体は、煙突の内側面の画像を撮影するカメラを有する。
【先行技術文献】
【特許文献】
【0003】
特許第6733925号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、無人小型飛行体をガイド及びガイドワイヤにて案内しつつ煙突の内部を飛行させて、無人小型飛行体のカメラによって煙突の画像を撮影することで、煙突の内側面の状態を確認できるものの、カメラの撮影高度及びカメラの撮影方向を認識できず、煙突の内側面に発生している異常の位置(異常の箇所)を特定できない虞がある。
【0005】
本発明は、円筒構造体の内側面の画像を撮影する点検カメラの撮影高度、撮影方向を求めることのできる円筒構造体の点検システムを提供することである。
【課題を解決するための手段】
【0006】
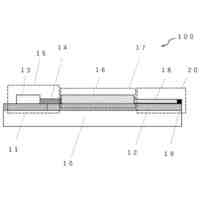
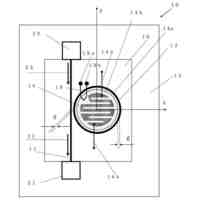
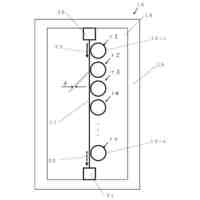
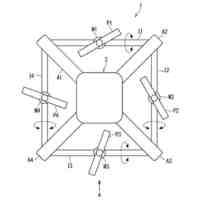
本発明に係る請求項1は、地上に立設される円筒構造体の内部に飛行される無人飛行体と、前記円筒構造体の内部に配置される発光装置と、前記無人飛行体に搭載される撮影装置と、位置演算装置と、を備え、前記発光装置は、前記円筒構造体の中心に位置して前記円筒構造体の底面に配置され、前記円筒構造体の内部に光を発して、前記無人飛行体の飛行態様を表示する飛行指示体と、前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間の前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第1発光体と、前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置される共に、前記第1発光体に対し前記円筒構造体の径方向の第1方向に間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第2発光体と、前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置されると共に、前記第1発光体に対し前記第1方向と直交する前記円筒構造体の径方向の第2方向に間隔を隔て、前記第2発光体に対し間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第3発光体と、前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置されると共に、前記第2発光体に対し前記第2方向に間隔を隔て、前記第3発光体に対し前記第1方向に間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第4発光体と、を有し、前記撮影装置は、前記無人飛行体に搭載される基準カメラ及び点検カメラを有し、前記無人飛行体は、前記円筒構造体の内部の空中に停止飛行され、前記基準カメラは、前記飛行指示体及び各発光体を含む画像を撮影し、前記点検カメラは、前記無人飛行体の停止飛行中に、前記円筒構造体の内側面の画像を撮影し、前記位置演算装置は、前記無人飛行体の停止飛行中に、前記基準カメラの撮影した画像に基づいて、前記点検カメラの撮影高度を求め、前記点検カメラの撮影と同時に、前記基準カメラの撮影した画像に基づいて、前記点検カメラの撮影方向を求めることを特徴とする円筒構造体の点検システムである。
【0007】
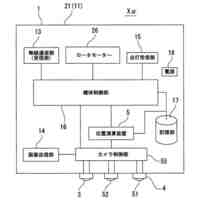
本発明に係る請求項2は、前記撮影装置は、前記点検カメラと、前記無人飛行体に搭載される固定焦点型の第1基準カメラと、前記無人飛行体に搭載され、前記第1基準カメラよりも焦点距離の長い固定焦点型の第2基準カメラと、カメラ制御部と、を有し、前記無人飛行体は、前記円筒構造体の前記底面から離陸されて、前記円筒構造体の内部の空中に停止飛行され、前記第1又は第2基準カメラは、前記飛行指示体及び前記各発光体を含む画像を撮影し、前記カメラ制御部は、前記無人飛行体の離陸開始から前記第1基準カメラの撮影を開始し、前記第1基準カメラの撮影した前記飛行指示体及び前記各発光体を含む画像の解像度が所定の解像度以下になると、前記第1基準カメラの撮影から前記第2基準カメラの撮影に切替え、前記位置演算装置は、前記無人飛行体の停止飛行中に、前記第1又は第2基準カメラの撮影した画像に基づいて、前記点検カメラの撮影高度を求め、前記点検カメラの撮影と同時に、前記第1又は第2基準カメラの撮影した画像に基づいて、前記点検カメラの撮影方向を求めることを特徴とする請求項1記載の円筒構造体の点検システムである。
【0008】
本発明に係る請求項3は、前記位置演算装置は、前記点検カメラの撮影と同時に、前記第1又は第2基準カメラの撮影した画像に基づいて、前記点検カメラの撮影高度を求めることを特徴とする請求項2に記載の円筒構造体の点検システムである。
【0009】
本発明に係る請求項4は、前記無人飛行体を遠隔操作する操縦装置を備え、前記無人飛行体は、前記無人飛行体の飛行を制御する機体制御部を有し、前記機体制御部は、前記操縦装置からの上昇飛行指令に基づいて、前記無人飛行体を前記円筒構造体の前記底面から離陸して、前記円筒構造体の中心線方向に上昇飛行させると共に、前記第1又は第2基準カメラの撮影した画像の飛行指示体に表示された飛行態様に基づいて、前記無人飛行体の飛行を制御することを特徴とする請求項2又は請求項3に記載の円筒構造体の点検システムである。
【0010】
本発明に係る請求項5は、地上に立設される円筒構造体の内部に飛行される無人飛行体と、前記円筒構造体の内部に配置される発光装置と、前記無人飛行体に搭載される撮影装置と、位置演算装置と、を備え、前記発光装置は、前記円筒構造体の中心に位置して前記円筒構造体の底面に配置され、前記円筒構造体の内部に光を発して、前記無人飛行体の飛行態様を表示する飛行指示体と、前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間の前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第1発光体と、前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置される共に、前記第1発光体に対し前記円筒構造体の径方向の第1方向に間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第2発光体と、前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置されると共に、前記第1発光体に対し前記第1方向と直交する前記円筒構造体の径方向の第2方向に間隔を隔て、前記第2発光体に対し間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第3発光体と、前記飛行指示体に対し間隔を隔てて前記円筒構造体の内側面及び前記飛行指示体の間に配置されると共に、前記第2発光体に対し前記第2方向に間隔を隔て、前記第3発光体に対し前記第1方向に間隔を隔てて前記円筒構造体の前記底面に配置され、前記円筒構造体の内部に光を発する第4発光体と、を有し、前記撮影装置は、前記無人飛行体に搭載される基準カメラ及び点検カメラを有し、前記無人飛行体は、前記円筒構造体の内部の空中に停止飛行され、前記基準カメラは、前記飛行指示体及び各発光体を含む画像を撮影し、前記点検カメラは、前記無人飛行体の停止飛行中に、前記円筒構造体の内側面の画像を撮影し、前記位置演算装置は、前記無人飛行体の停止飛行中に、前記基準カメラの撮影した画像に基づいて、前記点検カメラの撮影高度を求めることを特徴とする円筒構造体の点検システムである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人徳島大学
マイクロコム制御装置
17日前
国立大学法人徳島大学
ゼオライトの製造方法
3か月前
国立大学法人徳島大学
光位相変調モジュール
4か月前
国立大学法人徳島大学
円筒構造体の点検システム
9か月前
国立大学法人徳島大学
表面プラズモン共鳴センサー
11か月前
国立大学法人徳島大学
肝細胞様細胞の製造方法及びその利用
3日前
デンカ株式会社
残存膨張量測定方法
10か月前
国立大学法人徳島大学
マイクロ光共振器、及び光周波数コム発生装置
3日前
国立大学法人徳島大学
マイクロ光共振器、及び光周波数コム発生装置
3日前
国立大学法人徳島大学
マイクロ光共振器、及び光周波数コム発生装置
3日前
国立大学法人徳島大学
マイクロ光共振器、及び光周波数コム発生装置
3日前
国立大学法人 熊本大学
薬剤及び医薬組成物
10か月前
国立大学法人徳島大学
紫外線波長変換素子、及び紫外線分光測定装置
8か月前
JFEスチール株式会社
リン化合物の製造方法
5か月前
株式会社ジェイテクト
飼育設備および移動飼育設備
8か月前
国立大学法人徳島大学
分析プログラム、分析装置、分析方法、および測定装置
20日前
四国計測工業株式会社
植物栽培装置および植物栽培方法
11か月前
三菱電機株式会社
無人飛行体および無人飛行体の飛行制御方法
9か月前
株式会社マルイ
透気測定装置、透気測定方法、及び透気測定システム
4か月前
国立大学法人徳島大学
高偏極化対象物、並びに、その製造方法、高偏極化方法及び高偏極化装置
3か月前
愛知製鋼株式会社
アミノ酸t-ブチルエステル及び/又はその塩の製造方法
8か月前
ダイキン工業株式会社
刺激特定プログラム、刺激特定装置、および刺激特定システム
8か月前
ダイキン工業株式会社
腸状態推定プログラム、腸状態推定装置、および腸状態推定システム
8か月前
ダイキン工業株式会社
腸の状態を評価する評価装置、評価システム、評価方法および評価プログラム
11か月前
ナノミストテクノロジーズ株式会社
使用環境に対する超音波振動子の寿命を検出する超音波霧化システム
3か月前
国立大学法人徳島大学
器具の洗浄方法、原液処理装置および原液処理装置の操作方法
3か月前
国立大学法人徳島大学
腐敗菌情報検索方法、システム及びデータ構造並びにそのデータ構造を用いる食品安全・衛生管理システム及び方法
6か月前
個人
店内配信予約システム
2か月前
サクサ株式会社
中継装置
2か月前
WHISMR合同会社
収音装置
11日前
キヤノン株式会社
撮像装置
26日前
キヤノン株式会社
撮像装置
2か月前
アイホン株式会社
電気機器
5日前
キヤノン株式会社
通信装置
3か月前
キヤノン株式会社
電子機器
2か月前
日本精機株式会社
車両用表示装置
3か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ