TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024153926
公報種別
公開特許公報(A)
公開日
2024-10-29
出願番号
2024133338,2021199403
出願日
2024-08-08,2021-12-08
発明の名称
光測距装置
出願人
株式会社デンソー
代理人
個人
,
個人
主分類
G01S
7/497 20060101AFI20241022BHJP(測定;試験)
要約
【課題】トータルの測距時間を短縮しつつ、干渉が発生しているかどうかを判断できる光測距装置を提供する。
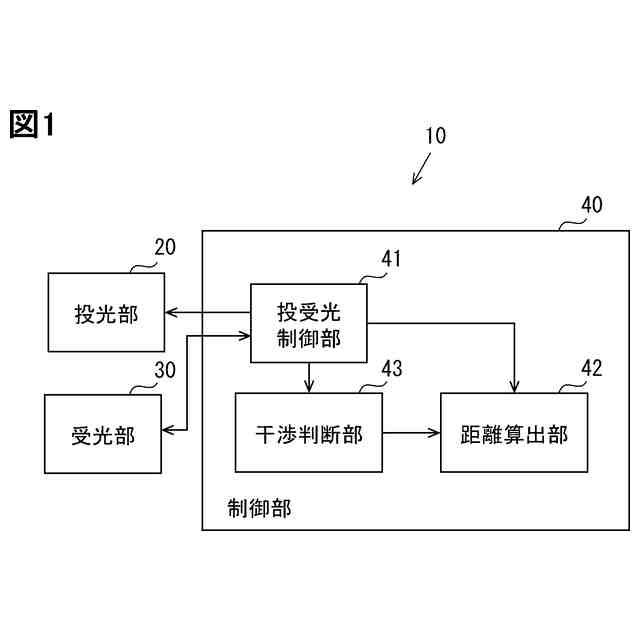
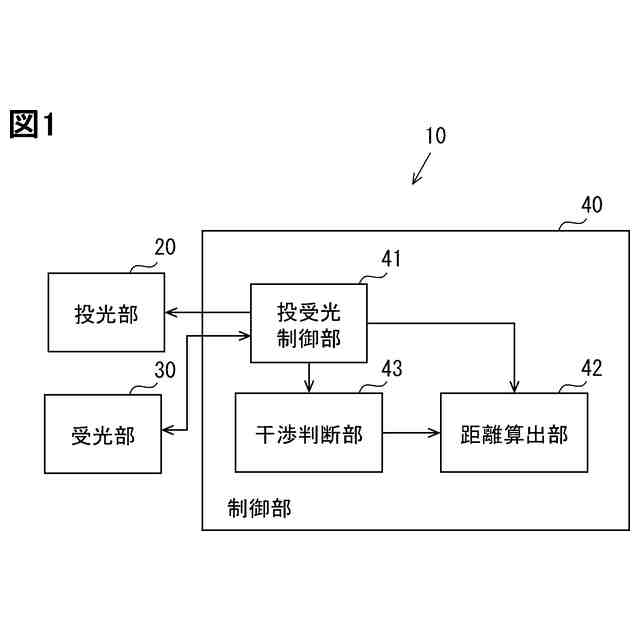
【解決手段】レーザ光の投光と受光により物体までの距離を測定する光測距装置10であって、レーザ光を走査しつつ投光する投光部20と、レーザ光を受光する受光部30と、投光部20が投光したレーザ光が反射して生じた反射レーザ光を受光するための受光期間に、受光部30が受光したレーザ光である受光波が複数ある場合、複数の受光波から得られる波形特徴に基づいて、干渉が発生しているか否かを判断する干渉判断部43を備える。
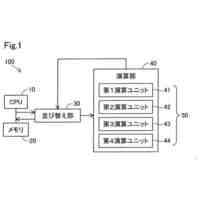
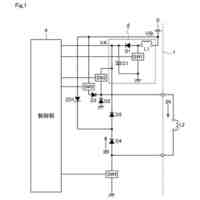
【選択図】図1
特許請求の範囲
【請求項1】
レーザ光の投光と受光により物体までの距離を測定する光測距装置であって、
前記レーザ光を走査しつつ投光する投光部(20)と、
前記レーザ光を受光する受光部(30)と、
前記投光部が投光した前記レーザ光が反射して生じた反射レーザ光を受光するための1回の受光期間に前記受光部が受光した受光信号、または、複数回の投光に対応した複数回の前記受光期間に前記受光部が受光した前記受光信号を積算した信号のいずれかである判断対象受光信号に、前記受光部が受光した前記レーザ光である受光波が複数ある場合、複数の前記受光波から得られる波形特徴に基づいて、干渉が発生しているか否かを判断する干渉判断部(43)を備え、
前記波形特徴が前記受光波の周期であり、
前記干渉判断部は、前記受光波に周期性がある場合、干渉が発生していると判断し、
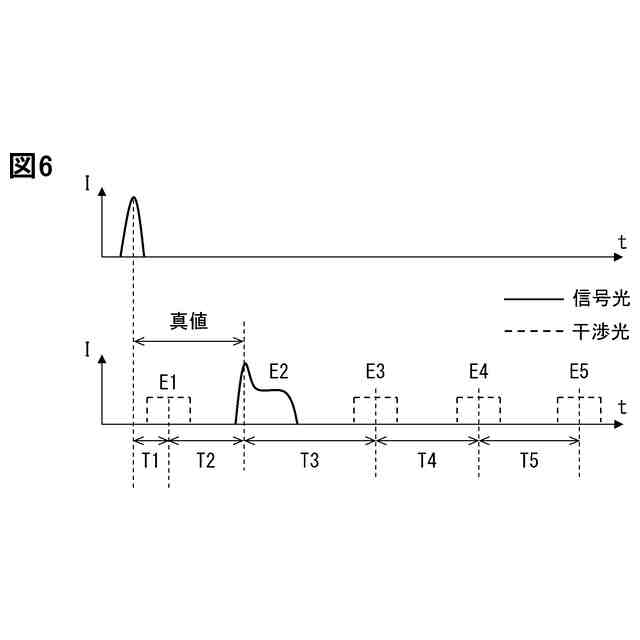
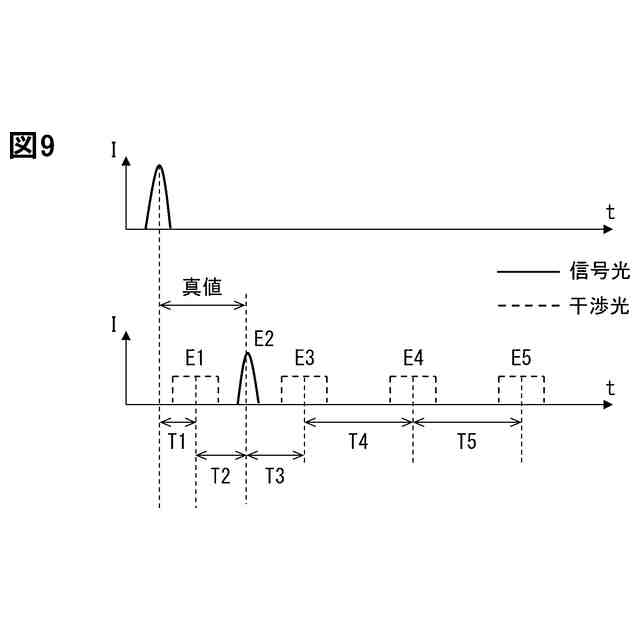
前記干渉判断部は、1つ前の波形の検出時刻から前記受光波の検出時刻までの時間差(T)を、複数の前記受光波についてそれぞれ算出し、互いに隣り合う前記受光波の前記時間差が近似していると判断できる場合、前記受光波に周期性があると判断し、
前記干渉判断部は、互いに隣り合う前記受光波の前記時間差が近似していると判断できる場合、前記時間差を干渉周期に決定し、
前記判断対象受光信号に複数の前記受光波がある場合、複数の前記受光波のうち、周期性がない前記受光波に基づいて距離を算出する距離算出部(42)を備え、
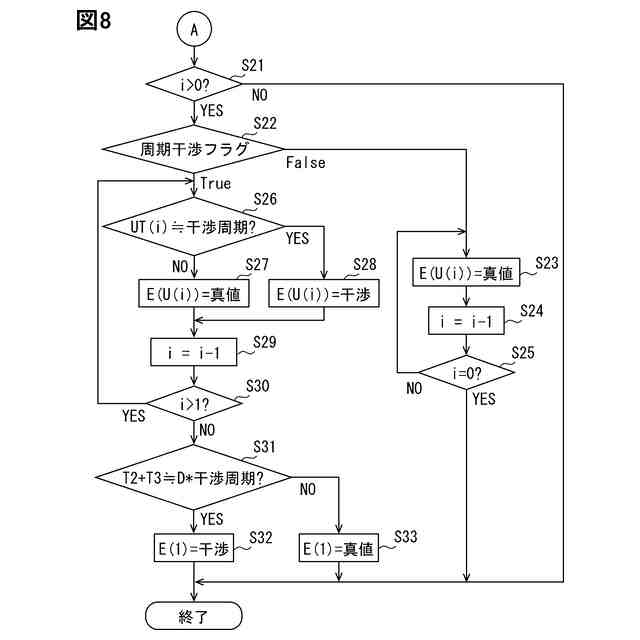
前記干渉判断部は、2番目の前記受光波の前記時間差と3番目の前記受光波の前記時間差の和が前記干渉周期の自然数倍と近似しない場合、1番目の前記受光波を周期性がない前記受光波であるとする、光測距装置。
続きを表示(約 1,300 文字)
【請求項2】
レーザ光の投光と受光により物体までの距離を測定する光測距装置であって、
前記レーザ光を走査しつつ投光する投光部(20)と、
前記レーザ光を受光する受光部(30)と、
前記投光部が投光した前記レーザ光が反射して生じた反射レーザ光を受光するための1回の受光期間に前記受光部が受光した受光信号、または、複数回の投光に対応した複数回の前記受光期間に前記受光部が受光した前記受光信号を積算した信号のいずれかである判断対象受光信号に、前記受光部が受光した前記レーザ光である受光波が複数ある場合、複数の前記受光波から得られる波形特徴に基づいて、干渉が発生しているか否かを判断する干渉判断部(43)を備え、
前記波形特徴が、それぞれの前記受光波の形状を特定する1種類以上の形状特徴値であり、
前記干渉判断部は、前記判断対象受光信号に複数の前記受光波がある場合、複数の前記受光波の前記形状特徴値を大きさの順に並べ、隣り合う前記形状特徴値が近似している場合に、干渉が発生していると判断する、光測距装置。
【請求項3】
請求項2に記載の光測距装置であって、
前記形状特徴値に前記受光波のピーク強度が含まれる、光測距装置。
【請求項4】
請求項2または3に記載の光測距装置であって、
前記形状特徴値に前記受光波の幅が含まれる、光測距装置。
【請求項5】
請求項2~4のいずれか1項に記載の光測距装置であって、
前記形状特徴値に前記受光波のエネルギーが含まれる、光測距装置。
【請求項6】
請求項2~5のいずれか1項に記載の光測距装置であって、
隣り合う前記形状特徴値と近似している前記形状特徴値を干渉基準値とし、
前記判断対象受光信号に複数の前記受光波がある場合、複数の前記受光波のうち、前記形状特徴値が前記干渉基準値と近似していない前記受光波に基づいて距離を算出する距離算出部(42)を備える、光測距装置。
【請求項7】
レーザ光の投光と受光により物体までの距離を測定する光測距装置であって、
前記レーザ光を走査しつつ投光する投光部(20)と、
前記レーザ光を受光する受光部(30)と、
前記投光部が投光した前記レーザ光が反射して生じた反射レーザ光を受光するための1回の受光期間に前記受光部が受光した受光信号、または、複数回の投光に対応した複数回の前記受光期間に前記受光部が受光した前記受光信号を積算した信号のいずれかである判断対象受光信号に、前記受光部が受光した前記レーザ光である受光波が複数ある場合、複数の前記受光波から得られる波形特徴に基づいて、干渉が発生しているか否かを判断する干渉判断部(43)を備え、
前記波形特徴が前記受光波の幅であり、
前記干渉判断部は、前記投光部が投光する前記レーザ光の幅よりは大きく、かつ、iTOF型の測距装置が送信するレーザ光のパルス幅よりも小さい値に設定された幅閾値よりも、前記受光波の幅が大きい前記受光波が前記判断対象受光信号にある場合、干渉が発生していると判断する、光測距装置。
発明の詳細な説明
【技術分野】
【0001】
光測距装置に関し、特に、干渉を検知する技術に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
レーザ光の投光と受光により物体までの距離を測定する光測距装置が知られている。光測距装置の周囲にレーザ光を投光する別の装置があり、その別の装置が投光するレーザ光を自装置が受光してしまうことがある。精度よく物体までの距離を測定するためには、別の装置が投光するレーザ光(以下、干渉光)を除去して距離を算出する必要がある。特許文献1では、レーザ光を投光する前の直前期間に干渉監視時間を設ける。干渉監視時間に受光があった場合、干渉が発生していると判断する。
【先行技術文献】
【特許文献】
【0003】
特開2018-72078号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された技術は干渉監視時間を設ける必要がある。そのため、測距のためにレーザ光の投光と受光をする期間を含むトータルの測距時間が長くなってしまう。
【0005】
本開示は、この事情に基づいて成されたものであり、その目的とするところは、トータルの測距時間を短縮しつつ、干渉が発生しているかどうかを判断できる光測距装置を提供することにある。
【課題を解決するための手段】
【0006】
上記目的は独立請求項に記載の特徴の組み合わせにより達成され、また、下位請求項は更なる有利な具体例を規定する。特許請求の範囲に記載した括弧内の符号は、一つの態様として後述する実施形態に記載の具体的態様との対応関係を示すものであって、開示した技術的範囲を限定するものではない。
【0007】
上記目的を達成するための1つの開示は、
レーザ光の投光と受光により物体までの距離を測定する光測距装置であって、
レーザ光を走査しつつ投光する投光部(20)と、
レーザ光を受光する受光部(30)と、
投光部が投光したレーザ光が反射して生じた反射レーザ光を受光するための1回の受光期間に受光部が受光した受光信号、または、複数回の投光に対応した複数回の受光期間に受光部が受光した受光信号を積算した信号のいずれかである判断対象受光信号に、受光部が受光したレーザ光である受光波が複数ある場合、複数の受光波から得られる波形特徴に基づいて、干渉が発生しているか否かを判断する干渉判断部(43)を備え、
波形特徴が受光波の周期であり、
干渉判断部は、受光波に周期性がある場合、干渉が発生していると判断し、
干渉判断部は、1つ前の波形の検出時刻から受光波の検出時刻までの時間差(T)を、複数の受光波についてそれぞれ算出し、互いに隣り合う受光波の時間差が近似していると判断できる場合、受光波に周期性があると判断し、
干渉判断部は、互いに隣り合う受光波の時間差が近似していると判断できる場合、時間差を干渉周期に決定し、
判断対象受光信号に複数の受光波がある場合、複数の受光波のうち、周期性がない受光波に基づいて距離を算出する距離算出部(42)を備え、
干渉判断部は、2番目の受光波の時間差と3番目の受光波の時間差の和が干渉周期の自然数倍と近似しない場合、1番目の受光波を周期性がない受光波であるとする、光測距装置である。
上記目的を達成するための1つの開示は、
レーザ光の投光と受光により物体までの距離を測定する光測距装置であって、
レーザ光を走査しつつ投光する投光部(20)と、
レーザ光を受光する受光部(30)と、
投光部が投光したレーザ光が反射して生じた反射レーザ光を受光するための1回の受光期間に受光部が受光した受光信号、または、複数回の投光に対応した複数回の受光期間に受光部が受光した受光信号を積算した信号のいずれかである判断対象受光信号に、受光部が受光したレーザ光である受光波が複数ある場合、複数の受光波から得られる波形特徴に基づいて、干渉が発生しているか否かを判断する干渉判断部(43)を備え、
波形特徴が、それぞれの受光波の形状を特定する1種類以上の形状特徴値であり、
干渉判断部は、判断対象受光信号に複数の受光波がある場合、複数の受光波の形状特徴値を大きさの順に並べ、隣り合う形状特徴値が近似している場合に、干渉が発生していると判断する、光測距装置である。
上記目的を達成するための1つの開示は、
レーザ光の投光と受光により物体までの距離を測定する光測距装置であって、
レーザ光を走査しつつ投光する投光部(20)と、
レーザ光を受光する受光部(30)と、
投光部が投光したレーザ光が反射して生じた反射レーザ光を受光するための1回の受光期間に受光部が受光した受光信号、または、複数回の投光に対応した複数回の受光期間に受光部が受光した受光信号を積算した信号のいずれかである判断対象受光信号に、受光部が受光したレーザ光である受光波が複数ある場合、複数の受光波から得られる波形特徴に基づいて、干渉が発生しているか否かを判断する干渉判断部(43)を備え、
波形特徴が受光波の幅であり、
干渉判断部は、投光部が投光するレーザ光の幅よりは大きく、かつ、iTOF型の測距装置が送信するレーザ光のパルス幅よりも小さい値に設定された幅閾値よりも、受光波の幅が大きい受光波が判断対象受光信号にある場合、干渉が発生していると判断する、光測距装置である。
【0008】
この光測距装置は、干渉が発生しているか否かを、反射レーザ光を受光するための受光期間に受光部が受光した受光信号から決定される判断対象受光信号に含まれる受光波の波形特徴に基づいて判断する。したがって、干渉が発生しているかどうかを判断するために直前期間を設ける必要がないので、トータルの測距時間を短縮できる。
【図面の簡単な説明】
【0009】
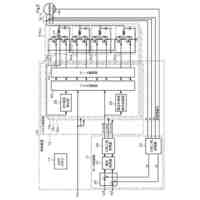
実施形態の光測距装置の構成を示す図。
干渉が生じる状況例を示す図。
光測距装置が投受光するレーザ光の時刻と強度の関係を示す図。
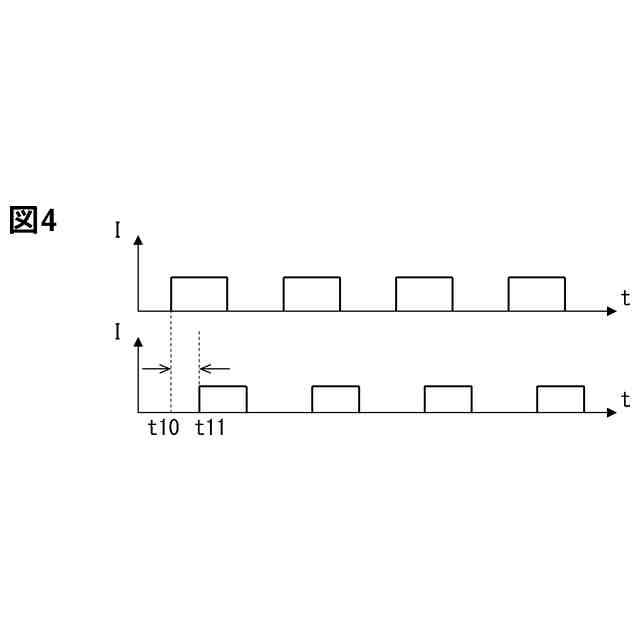
光測距装置が投受光するレーザ光の時刻と強度の関係を示す図。
干渉が生じている状態で光測距装置が投受光する光の強度を示す図。
干渉が生じている状態で光測距装置が投受光する光の強度を示す図。
第1実施形態で干渉判断部が実行する処理を示す図。
図7に続く処理を示す図。
S31からS33の処理を行う理由を説明する図。
第2実施形態において図7に代えて実行する処理を示す図。
図10に続いて実行する処理を示す図。
第3実施形態において図7に代えて実行する処理を示す図。
図12に続いて実行する処理を示す図。
受光波Eのパルス幅W、エネルギーJを説明する図。
受光波Eのパルス幅W、エネルギーJを説明する図。
第4実施形態において図7に代えて実行する処理を示す図。
図16に続いて実行する処理を示す図。
第5実施形態において図7に代えて実行する処理を示す図。
図18に続いて実行する処理を示す図。
第6実施形態において図7に代えて実行する処理を示す図。
図20に続いて実行する処理を示す図。
第7実施形態において図7に代えて実行する処理を示す図。
図22に続いて実行する処理を示す図。
第8実施形態において図7に代えて実行する処理を示す図。
図24に続いて実行する処理を示す図。
変形例3の判断対象受光信号を説明する図。
【発明を実施するための形態】
【0010】
<第1実施形態>
以下、実施形態を図面に基づいて説明する。図1は、実施形態の光測距装置10の構成を示す図である。光測距装置10は、投光部20と、受光部30と、制御部40とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
圧電素子
4日前
株式会社デンソー
通信装置
18日前
株式会社デンソー
電気機器
4日前
株式会社デンソー
駆動装置
18日前
株式会社デンソー
測距装置
4日前
株式会社デンソー
切断装置
20日前
株式会社デンソー
送風装置
13日前
株式会社デンソー
演算装置
今日
株式会社デンソー
表示装置
18日前
株式会社デンソー
表示装置
11日前
株式会社デンソー
真空装置
14日前
株式会社デンソー
ステータ
今日
株式会社デンソーテン
表示装置
14日前
株式会社デンソー
管理装置
18日前
株式会社デンソー
蓄放熱材料
6日前
株式会社デンソー
ガスケット
6日前
株式会社デンソー
音低減装置
11日前
株式会社デンソー
半導体装置
11日前
株式会社デンソー
レーダ装置
18日前
株式会社デンソー
電力変換器
12日前
株式会社デンソー
電力変換器
12日前
株式会社デンソー
電力変換器
今日
株式会社デンソー
電力変換器
今日
株式会社デンソー
半導体装置
今日
株式会社デンソー
電力変換装置
18日前
株式会社デンソー
スイッチ回路
19日前
株式会社デンソー
運転支援装置
11日前
株式会社デンソー
流路形成装置
11日前
株式会社デンソー
リニアモータ
14日前
株式会社デンソー
流路形成装置
11日前
株式会社デンソー
物品昇降装置
18日前
株式会社デンソー
電気接続装置
19日前
株式会社デンソー
フィルタ装置
4日前
株式会社デンソー
画像処理装置
19日前
株式会社デンソー
電子制御装置
20日前
株式会社デンソー
電子制御装置
20日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ