TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024153878
公報種別
公開特許公報(A)
公開日
2024-10-29
出願番号
2024127772,2021189632
出願日
2024-08-02,2021-11-22
発明の名称
自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラム
出願人
株式会社デンソー
代理人
個人
,
個人
主分類
B60W
50/14 20200101AFI20241022BHJP(車両一般)
要約
【課題】周辺監視義務のない自動運転の利便性を向上可能な自動運転制御装置等の提供。
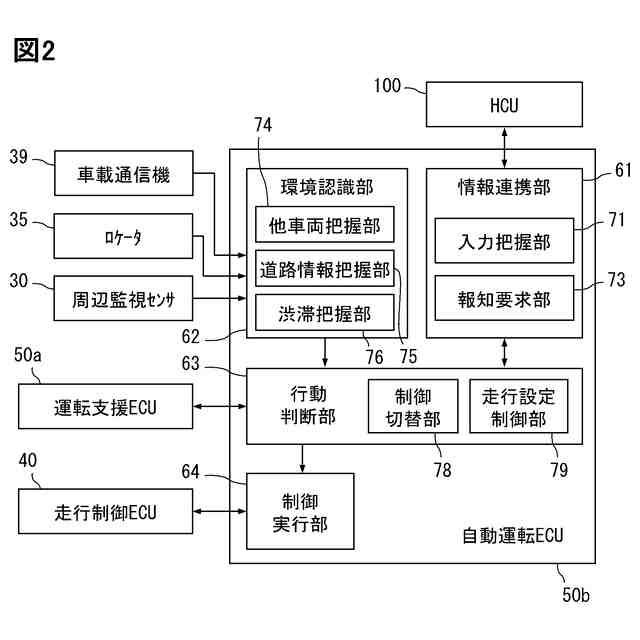
【解決手段】自動運転ECU50bは、制御切替部78、走行設定制御部79及び報知要求部73を備えており、ドライバによる周辺監視義務のない自律走行制御によって自車両を走行させる自動運転制御装置として機能する。制御切替部78は、周辺監視義務のある運転支援制御と、周辺監視義務のない自律走行制御とを含む複数のうちで、走行制御状態を切り替える。走行設定制御部79は、運転支援制御から自律走行制御に走行制御状態が移行する場合、自車両から追従対象車両までの車間距離の設定を変更する。報知要求部73は、車間距離の変更後に、HMIシステムによって自律走行制御への移行完了を報知させる。
【選択図】図2
特許請求の範囲
【請求項1】
ドライバによる周辺監視義務のある運転支援制御と、前記ドライバによる周辺監視義務のない自律走行制御とを少なくとも含む複数のうちで、自車両(Am)の走行制御状態を切り替える制御切替部(78)と、
前記運転支援制御から前記自律走行制御に前記走行制御状態が移行する場合、前記自車両から追従対象車両(At)までの車間距離(VD)の設定を変更する車間制御部(79)と、
前記運転支援制御から前記自律走行制御に前記走行制御状態が移行する場合、前記ドライバへ向けた情報提示を行う情報提示装置(10)に、前記車間距離の変更後に前記自律走行制御への移行完了を報知させる報知制御部(73)と、
を備える自動運転制御装置。
続きを表示(約 2,000 文字)
【請求項2】
前記制御切替部は、前記車間制御部によって前記車間距離が変更された後に、前記運転支援制御から前記自律走行制御へと前記走行制御状態を切り替える請求項1に記載の自動運転制御装置。
【請求項3】
前記車間制御部は、前記制御切替部によって前記運転支援制御から前記自律走行制御に前記走行制御状態が切り替えられた後、前記車間距離を変更する請求項1に記載の自動運転制御装置。
【請求項4】
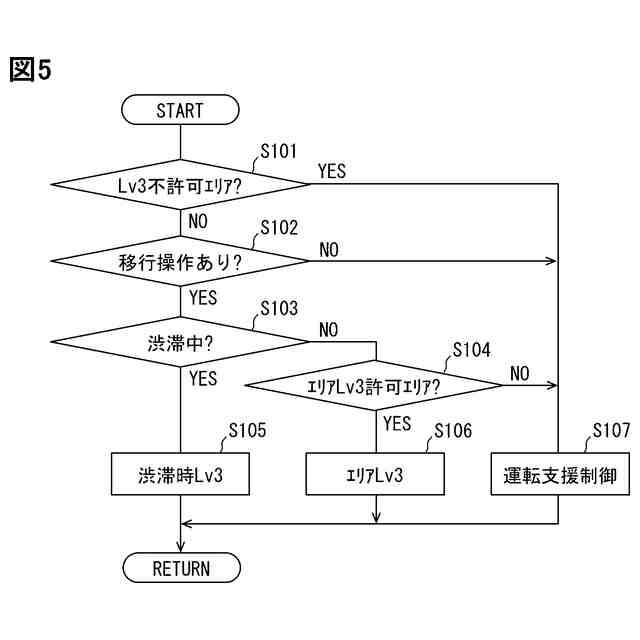
ドライバによる周辺監視義務のある運転支援制御と、前記ドライバによる周辺監視義務のない自律走行制御とを少なくとも含む複数のうちで、自車両(Am)の走行制御状態を切り替え(S101~S107)、
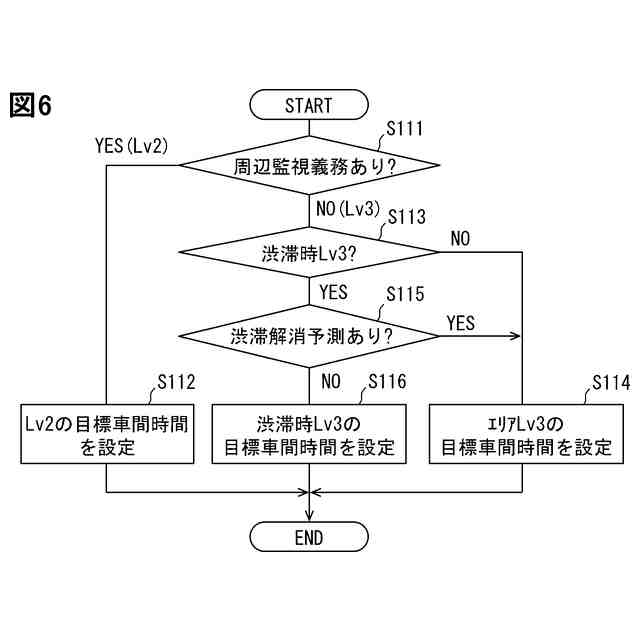
前記運転支援制御から前記自律走行制御に前記走行制御状態が移行する場合、前記自車両から追従対象車両(At)までの車間距離(VD)の設定を変更し(S114,S116,S319~S322,S416,S516)、
前記ドライバへ向けた情報提示を行う情報提示装置(10)に、前記車間距離の変更後に前記自律走行制御への移行完了を報知させる、
ことを含む処理を、少なくとも一つの処理部(51)に実行させる自動運転制御プログラム。
【請求項5】
自動運転機能を搭載する自車両(Am)において用いられ、ドライバへ向けた情報の提示を制御する提示制御装置であって、
前記ドライバによる周辺監視義務のある運転支援制御と、前記ドライバによる周辺監視義務のない自律走行制御とを少なくとも含む複数のうちでの走行制御状態の切り替わりを示す切替情報を取得する情報取得部(81)と、
前記切替情報に基づき、前記走行制御状態の移行完了を報知する報知制御部(88)と、を備え、
前記報知制御部は、前記運転支援制御から前記自律走行制御に前記走行制御状態が移行される場合、前記自車両から追従対象車両(At)までの車間距離(VD)が前記自動運転機能によって変更された後に、前記自律走行制御への移行完了を報知する提示制御装置。
【請求項6】
自動運転機能を搭載する自車両(Am)において用いられ、ドライバへ向けた情報の提示を制御する提示制御プログラムであって、
前記ドライバによる周辺監視義務のある運転支援制御と、前記ドライバによる周辺監視義務のない自律走行制御とを少なくとも含む複数のうちでの走行制御状態の切り替わりを示す切替情報を取得し(S11,S211)、
前記切替情報に基づき、前記走行制御状態の移行完了を報知する(S12,S213)、ことを含む処理を、少なくとも一つの処理部(11)に実行させ、
前記運転支援制御から前記自律走行制御に前記走行制御状態が移行される場合、前記自車両から追従対象車両(At)までの車間距離(VD)が前記自動運転機能によって変更された後に、前記自律走行制御への移行完了を報知する提示制御プログラム。
【請求項7】
ドライバによる周辺監視義務のある運転支援制御と、前記ドライバによる周辺監視義務のない自律走行制御とを少なくとも含む複数のうちで、自車両(Am)の走行制御状態を切り替える制御切替部(78)と、
前記自車両の周囲の渋滞を把握する渋滞把握部(76)と、
前記自律走行制御での走行中に渋滞が把握された場合、前記運転支援制御での走行中に渋滞が把握された場合よりも、前記自車両から追従対象車両(At)までの車間距離(VD)が狭くなる設定に変更する車間制御部(79)と、
を備える自動運転制御装置。
【請求項8】
前記自律走行制御には、特定エリア(SeA)内の走行に限定して実施されるエリア限定制御、及び渋滞中の走行に限定して実施される渋滞限定制御が含まれており、
前記車間制御部は、前記制御切替部によって前記エリア限定制御から前記渋滞限定制御に前記走行制御状態が移行される場合、前記車間距離が狭くなる設定に変更する請求項7に記載の自動運転制御装置。
【請求項9】
前記制御切替部により前記エリア限定制御から前記渋滞限定制御へと前記走行制御状態が移行される場合、前記ドライバへ向けた情報提示を行う情報提示装置(10)に、前記車間距離が狭くなることを報知させる報知制御部(73)、をさらに備える請求項8に記載の自動運転制御装置。
【請求項10】
前記自律走行制御には、渋滞中の走行に限定して実施される渋滞限定制御が含まれており、
前記車間制御部は、前記運転支援制御による走行中に渋滞が把握され、前記運転支援制御から前記渋滞限定制御に前記走行制御状態が移行される場合、前記渋滞限定制御への移行が完了するまで前記車間距離の設定を維持する請求項7に記載の自動運転制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この明細書における開示は、自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1に開示の走行制御装置は、ドライバに周辺監視義務が要求されない自律的な走行制御を実施できる。この走行制御装置は、自車両と同一レーンを走行する他車両との前後方向の車間距離を制御するため、自車両を加速又は減速させる。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/043847号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されたように、周辺監視義務のない自動運転制御が開始されると、ドライバは、自車両の周囲の状況を把握しなくてもよくなる。そのため、自車両から追従車両までの車間距離の変化等に対して違和感を覚え易くなる。その結果、自動運転に対する利便性が低く感じられてしまう懸念があった。
【0005】
本開示は、周辺監視義務のない自動運転の利便性を向上可能な自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラムの提供を目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、開示された一つの態様は、ドライバによる周辺監視義務のある運転支援制御と、ドライバによる周辺監視義務のない自律走行制御とを少なくとも含む複数のうちで、自車両(Am)の走行制御状態を切り替える制御切替部(78)と、運転支援制御から自律走行制御に走行制御状態が移行する場合、自車両から追従対象車両(At)までの車間距離(VD)の設定を変更する車間制御部(79)と、運転支援制御から自律走行制御に走行制御状態が移行する場合、ドライバへ向けた情報提示を行う情報提示装置(10)に、車間距離の変更後に自律走行制御への移行完了を報知させる報知制御部(73)と、を備える自動運転制御装置とされる。
【0007】
また開示された一つの態様は、ドライバによる周辺監視義務のある運転支援制御と、ドライバによる周辺監視義務のない自律走行制御とを少なくとも含む複数のうちで、自車両(Am)の走行制御状態を切り替え(S101~S107)、運転支援制御から自律走行制御に走行制御状態が移行する場合、自車両から追従対象車両(At)までの車間距離(VD)の設定を変更し(S114,S116,S319~S322,S416,S516)、ドライバへ向けた情報提示を行う情報提示装置(10)に、車間距離の変更後に自律走行制御への移行完了を報知させる、ことを含む処理を、少なくとも一つの処理部(51)に実行させる自動運転制御プログラムとされる。
【0008】
また開示された一つの態様は、自動運転機能を搭載する自車両(Am)において用いられ、ドライバへ向けた情報の提示を制御する提示制御装置であって、ドライバによる周辺監視義務のある運転支援制御と、ドライバによる周辺監視義務のない自律走行制御とを少なくとも含む複数のうちでの走行制御状態の切り替わりを示す切替情報を取得する情報取得部(81)と、切替情報に基づき、走行制御状態の移行完了を報知する報知制御部(88)と、を備え、報知制御部は、運転支援制御から自律走行制御に走行制御状態が移行される場合、自車両から追従対象車両(At)までの車間距離(VD)が自動運転機能によって変更された後に、自律走行制御への移行完了を報知する提示制御装置とされる。
【0009】
また開示された一つの態様は、自動運転機能を搭載する自車両(Am)において用いられ、ドライバへ向けた情報の提示を制御する提示制御プログラムであって、ドライバによる周辺監視義務のある運転支援制御と、ドライバによる周辺監視義務のない自律走行制御とを少なくとも含む複数のうちでの走行制御状態の切り替わりを示す切替情報を取得し(S11,S211)、切替情報に基づき、走行制御状態の移行完了を報知する(S12,S213)、ことを含む処理を、少なくとも一つの処理部(11)に実行させ、運転支援制御から自律走行制御に走行制御状態が移行される場合、自車両から追従対象車両(At)までの車間距離(VD)が自動運転機能によって変更された後に、自律走行制御への移行完了を報知する提示制御プログラムとされる。
【0010】
これらの態様では、周辺監視義務のある運転支援制御から周辺監視義務のない自動運転制御へと走行制御状態が移行する場合、車間距離が変更された後に、自動運転制御への移行完了を示す報知が行われる。故に、ドライバが周辺監視を継続しているうちに、車間距離が変更される。その結果、車間距離を変更する過程をドライバが把握し易くなるため、自動運転の利便性が向上可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
駆動装置
18日前
株式会社デンソー
電気機器
4日前
株式会社デンソートリム
電子装置
26日前
株式会社デンソー
表示装置
11日前
株式会社デンソー
送風装置
13日前
株式会社デンソー
真空装置
14日前
株式会社デンソー
圧電素子
4日前
株式会社デンソーテン
表示装置
14日前
株式会社デンソー
通信装置
18日前
株式会社デンソー
測距装置
4日前
株式会社デンソー
管理装置
18日前
株式会社デンソー
表示装置
18日前
株式会社デンソー
切断装置
20日前
株式会社デンソー
ステータ
今日
株式会社デンソー
演算装置
今日
株式会社デンソー
レーダ装置
22日前
株式会社デンソー
音低減装置
11日前
株式会社デンソー
ガスケット
6日前
株式会社デンソー
半導体装置
11日前
株式会社デンソー
電力変換器
12日前
株式会社デンソー
電力変換器
12日前
株式会社デンソー
半導体装置
今日
株式会社デンソー
電力変換器
今日
株式会社デンソー
電力変換器
今日
株式会社デンソー
蓄放熱材料
6日前
株式会社デンソー
レーダ装置
18日前
株式会社デンソー
電子制御装置
20日前
株式会社デンソー
流路形成装置
11日前
株式会社デンソー
スイッチ回路
19日前
株式会社デンソー
電気接続装置
19日前
株式会社デンソー
電気化学セル
25日前
株式会社デンソー
運転支援装置
11日前
株式会社デンソーウェーブ
無線読取装置
25日前
株式会社デンソー
電力変換装置
18日前
株式会社デンソー
画像処理装置
19日前
株式会社デンソー
電力変換装置
25日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ