TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024144875
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023057038
出願日
2023-03-31
発明の名称
運航管理装置、運航管理方法およびコンピュータプログラム
出願人
日本電気株式会社
代理人
個人
,
個人
主分類
G08G
5/00 20060101AFI20241004BHJP(信号)
要約
【課題】 運航管理に用いられる位置情報に表される位置と、エアモビリティの実際の飛行位置とのずれに因るエアモビリティの運航管理の不具合発生を抑制する。
【解決手段】 運航管理装置の取得部と算出部と出力部と管理部とを備えている。取得部は、エアモビリティの周囲環境の情報と、エアモビリティから発信された位置情報とを取得する。算出部は、取得されたエアモビリティの周囲環境の情報および位置情報を用いて、エアモビリティが飛行していると推定される領域を推定飛行領域として算出する。出力部は、推定飛行領域を表す情報を出力する。管理部は、推定飛行領域を用いてエアモビリティの運航管理を行う。
【選択図】 図13
特許請求の範囲
【請求項1】
エアモビリティの周囲環境の情報と、前記エアモビリティから発信された位置情報とを取得する取得部と
取得された前記エアモビリティの周囲環境の情報および位置情報を用いて、前記エアモビリティが飛行していると推定される領域を推定飛行領域として算出する算出部と、
推定飛行領域を表す情報を出力する出力部と、
推定飛行領域を用いて前記エアモビリティの運航管理を行う管理部と
を備える運航管理装置。
続きを表示(約 1,400 文字)
【請求項2】
前記取得部は、さらに、前記エアモビリティの動力源におけるエネルギー源の残量に関わる残量情報を取得し、
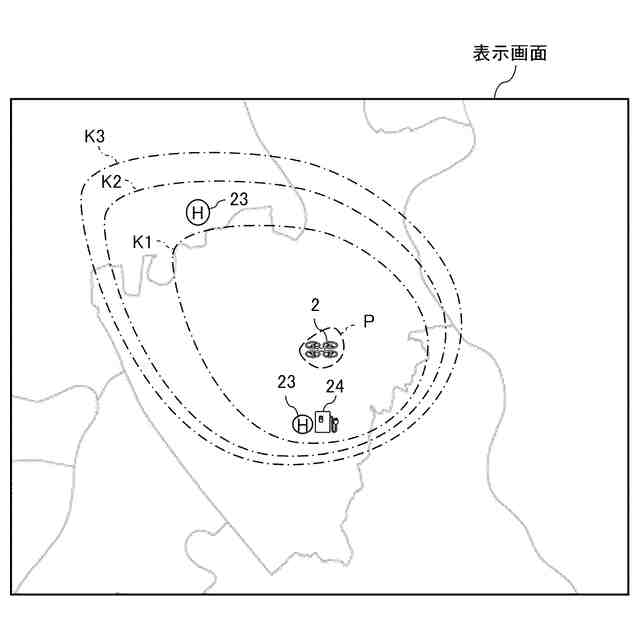
前記算出部は、さらに、取得された残量情報と、周囲環境の情報と、推定飛行領域とを用いて、飛行中の前記エアモビリティが継続して飛行可能な範囲を航続範囲として算出し、
前記出力部は、さらに、算出された航続範囲を表す情報を出力する
請求項1に記載の運航管理装置。
【請求項3】
前記算出部は、安全性の度合いが異なる複数の航続範囲を算出する
請求項2に記載の運航管理装置。
【請求項4】
前記出力部は、出力する航続範囲を表す情報に関連付けて、当該航続範囲の内側に在る緊急に着陸可能な離着陸場の場所情報および動力源関連設備の設置場所情報を出力する
請求項2に記載の運航管理装置。
【請求項5】
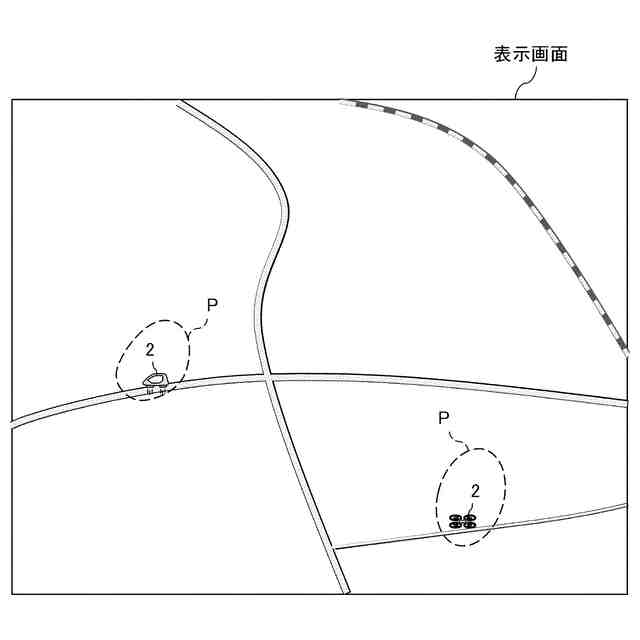
前記管理部は、前記エアモビリティの推定飛行領域と、前記エアモビリティの予め与えられている飛行計画とを用いて、前記エアモビリティが飛行計画通りに飛行しているか否かを判断し、
前記出力部は、前記エアモビリティに関する情報を表示装置に出力し、
表示装置に出力された前記エアモビリティに関する情報であって飛行計画通りに飛行していないと判断された前記エアモビリティに関する情報の少なくとも一部は、表示装置の表示画面に強調表示される
請求項1に記載の運航管理装置。
【請求項6】
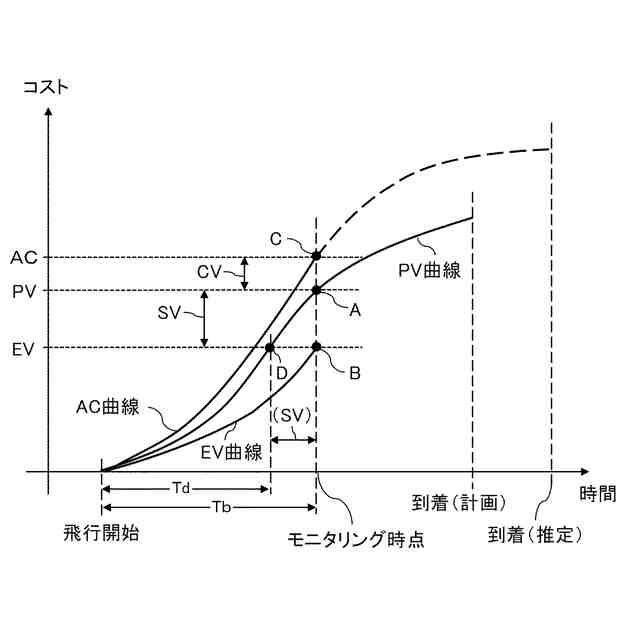
前記管理部は、前記エアモビリティの予め与えられている飛行計画と、前記推定飛行領域の情報を用いて算出される前記エアモビリティが飛行を開始してからの飛行距離と、前記エアモビリティが飛行を開始してから消費したエネルギー消費量と、前記エアモビリティの出発地および目的地と、前記エアモビリティが飛行を開始してから目的地に到着するまでに必要と計画されたエネルギー消費量との情報を用いて、運航管理に用いる前記エアモビリティの運航状況を数値化する指標を算出し、算出した指標を用いて前記エアモビリティの運航管理を行う
請求項1に記載の運航管理装置。
【請求項7】
前記出力部は、前記管理部により算出された指標を表す情報をさらに出力する
請求項6に記載の運航管理装置。
【請求項8】
コンピュータによって、
エアモビリティの周囲環境の情報と、前記エアモビリティから発信された位置情報とを取得し、
取得された前記エアモビリティの周囲環境の情報および位置情報を用いて、前記エアモビリティが飛行していると推定される領域を推定飛行領域として算出し、
推定飛行領域を表す情報を出力し、
推定飛行領域を用いて前記エアモビリティの運航管理を行う運航管理方法。
【請求項9】
エアモビリティの周囲環境の情報と、前記エアモビリティから発信された位置情報とを取得する処理と、
取得された前記エアモビリティの周囲環境の情報および位置情報を用いて、前記エアモビリティが飛行していると推定される領域を推定飛行領域として算出する処理と、
推定飛行領域を表す情報を出力する処理と、
推定飛行領域を用いて前記エアモビリティの運航管理を行う処理と
をコンピュータに実行させるコンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ドローンや空飛ぶクルマなどのエアモビリティの運航を管理する技術に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
エアモビリティを用いた空の利活用を実現するために、エアモビリティの機体開発や運航管理のルール検討などが行われている。ここでのエアモビリティとは、電動垂直離着陸型航空機であり、UAV(Unmanned Aerial Vehicle(ドローンとも称される))や空飛ぶクルマが例として挙げられる。
【0003】
なお、特許文献1(特開2022-186375号公報)には、無人航空機の運航計画管理に関する次のような技術が示されている。つまり、特許文献1では、空域が複数のセルに区画され、セル毎の空中リスクと地上リスクの情報が運航管理計画装置に記憶されている。運航管理計画装置は、そのような情報を用いて、無人航空機が飛行することにより生じるリスクの度合いであるリスク値をセル毎に算出し、セル毎のリスク値を表すリスクマップを生成する技術が示されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-186375号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
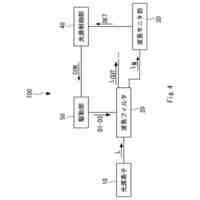
エアモビリティの運航管理には、飛行中のエアモビリティから発信された位置情報が用いられる。その位置情報はエアモビリティから無線通信により予め定められた頻度でもって定期的に発信され、当該位置情報を受信する受信装置を介して運航管理を行う運航管理装置に伝達される。運航管理装置では、エアモビリティが位置情報に表される位置を飛行しているとして当該エアモビリティの運航管理を行う。
【0006】
しかしながら、運航管理に用いる位置情報に基づいたエアモビリティの飛行位置がエアモビリティの正しい飛行位置であるとは限らない。つまり、位置情報がエアモビリティから発信されてから、この位置情報が運航管理装置に伝達され運航管理に係る処理により運航管理装置で認識されるまでに僅かではあるが、時間が掛かる。また、例えば、位置情報を発信した直後に突風でエアモビリティが飛ばされたことに因ってエアモビリティの飛行位置が位置情報により表される位置からずれてしまう場合がある。また、エアモビリティの飛行空域の電波通信状況が不良のために、エアモビリティから発信された位置情報が受信装置により受信されない場合がある。つまり、エアモビリティから定期的に発信される位置情報のうち、電波通信状況の不良などの原因により受信装置で受信できない位置情報が生じる場合がある。このような場合には、その位置情報の抜けに因り運航管理装置が運航管理に用いるエアモビリティの飛行位置が更新されず、エアモビリティは運航管理装置が認識しているエアモビリティの飛行位置よりも前進している場合がある。このようなことから、運航管理装置が認識しているエアモビリティの飛行位置と、エアモビリティの実際の飛行位置とにずれが生じてしまい、このようなずれは、エアモビリティの運航管理に支障を来すおそれがある。
【0007】
本発明は上述したような課題を解決するために考え出された。すなわち、本発明の主な目的は、運航管理に用いられる位置情報に表される位置と、エアモビリティの実際の飛行位置とのずれに因るエアモビリティの運航管理の不具合発生を抑制する技術を提供することである。
【課題を解決するための手段】
【0008】
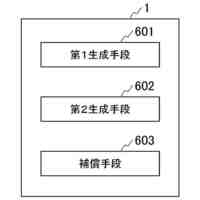
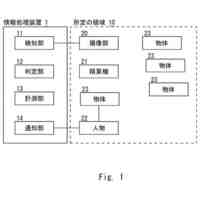
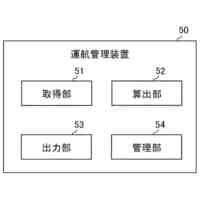
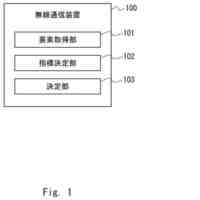
上記目的を達成するために、本発明に係る運航管理装置は、その一態様として、
エアモビリティの周囲環境の情報と、前記エアモビリティから発信された位置情報とを取得する取得部と
取得された前記エアモビリティの周囲環境の情報および位置情報を用いて、前記エアモビリティが飛行していると推定される領域を推定飛行領域として算出する算出部と、
推定飛行領域を表す情報を出力する出力部と、
推定飛行領域を用いて前記エアモビリティの運航管理を行う管理部と
を備える。
【0009】
また、本発明に係る運航管理方法は、その一態様として、
コンピュータによって、
エアモビリティの周囲環境の情報と、前記エアモビリティから発信された位置情報とを取得し、
取得された前記エアモビリティの周囲環境の情報および位置情報を用いて、前記エアモビリティが飛行していると推定される領域を推定飛行領域として算出し、
推定飛行領域を表す情報を出力し、
推定飛行領域を用いて前記エアモビリティの運航管理を行う。
【0010】
さらに、本発明に係るコンピュータプログラムは、その一態様として、
エアモビリティの周囲環境の情報と、前記エアモビリティから発信された位置情報とを取得する処理と、
取得された前記エアモビリティの周囲環境の情報および位置情報を用いて、前記エアモビリティが飛行していると推定される領域を推定飛行領域として算出する処理と、
推定飛行領域を表す情報を出力する処理と、
推定飛行領域を用いて前記エアモビリティの運航管理を行う処理と
をコンピュータに実行させる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
アンテナ装置
8日前
日本電気株式会社
端末及び第2の端末
8日前
日本電気株式会社
超伝導回路装置とその製造方法
8日前
日本電気株式会社
海底ケーブルシステムの敷設方法
7日前
日本電気株式会社
学習装置、学習方法およびプログラム
8日前
日本電気株式会社
処理装置、処理方法、及びプログラム
8日前
日本電気株式会社
RF測定器、補正方法、及びプログラム
今日
日本電気株式会社
試着室システム、試着方法、プログラム
2日前
日本電気株式会社
通信システム、処理方法、およびプログラム
8日前
日本電気株式会社
通信システム、処理方法、およびプログラム
8日前
日本電気株式会社
情報処理装置、情報処理方法、及びプログラム
8日前
日本電気株式会社
信号処理装置、信号処理方法、及びプログラム
7日前
日本電気株式会社
信号処理装置、信号処理方法およびプログラム
8日前
日本電気株式会社
航跡管理装置、航跡管理方法、及びプログラム
7日前
日本電気株式会社
処理装置、処理方法、プログラム、および認証装置
3日前
日本電気株式会社
移送方法判定システム、判定方法、及びプログラム
8日前
日本電気株式会社
申請支援システム、申請支援方法、及びプログラム
8日前
日本電気株式会社
信号処理装置、信号処理方法及び信号処理プログラム
7日前
日本電気株式会社
波長可変光源装置、光トランシーバ及び波長制御方法
7日前
日本電気株式会社
考査支援装置、考査支援方法及び考査支援プログラム
7日前
日本電気株式会社
映像伝送システム、映像伝送装置、及び映像伝送方法
7日前
日本電気株式会社
情報処理装置、情報処理方法、プログラム、及びシステム
3日前
日本電気株式会社
情報処理装置、情報処理方法、プログラム、及びシステム
1日前
日本電気株式会社
海底観測装置、海底観測システム、制御方法及びプログラム
8日前
日本電気株式会社
運航支援装置、運航支援方法およびコンピュータプログラム
3日前
日本電気株式会社
運航管理装置、運航管理方法およびコンピュータプログラム
3日前
日本電気株式会社
サーバ装置、システム、サーバ装置の制御方法及びプログラム
2日前
日本電気株式会社
情報処理システム、情報処理装置、情報処理方法及びプログラム
8日前
日本電気株式会社
無線通信装置、無線通信システム、無線通信方法、及びプログラム
7日前
日本電気株式会社
学習支援装置、学習支援システム、学習支援方法、およびプログラム
7日前
日本電気株式会社
車両運行管理装置、車両運行管理システム、車両運行管理方法及びプログラム
8日前
日本電気株式会社
ニューラルネットワーク構造探索装置およびニューラルネットワーク構造探索方法
8日前
日本電気株式会社
陰極、陽極、電磁波発生システム及び電磁波発生システムにおける電磁波発生方法
8日前
日本電気株式会社
健全性評価装置、健全性評価システム、健全性評価方法及び健全性評価プログラム
8日前
日本電気株式会社
膝痛リスク推定装置、身体状態推定システム、膝痛リスク推定方法、およびプログラム
8日前
日本電気株式会社
文書提供装置、サーバ、サーバ起動システム、文書提供方法、制御方法、およびプログラム
8日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ