TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024089441
公報種別
公開特許公報(A)
公開日
2024-07-03
出願番号
2022204802
出願日
2022-12-21
発明の名称
制御装置
出願人
東洋電機製造株式会社
代理人
個人
,
個人
,
個人
主分類
H02P
21/26 20160101AFI20240626BHJP(電力の発電,変換,配電)
要約
【課題】電動機6のトルク制御の高精度化を図る。
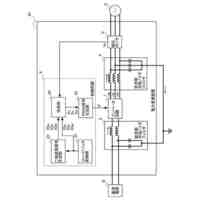
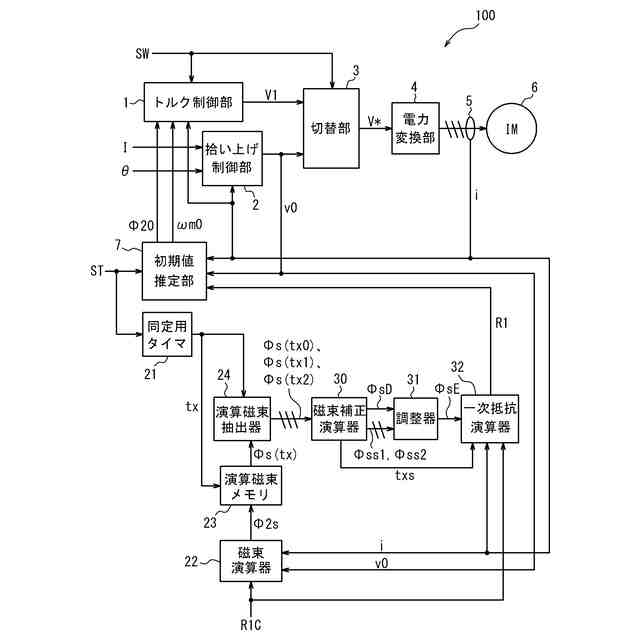
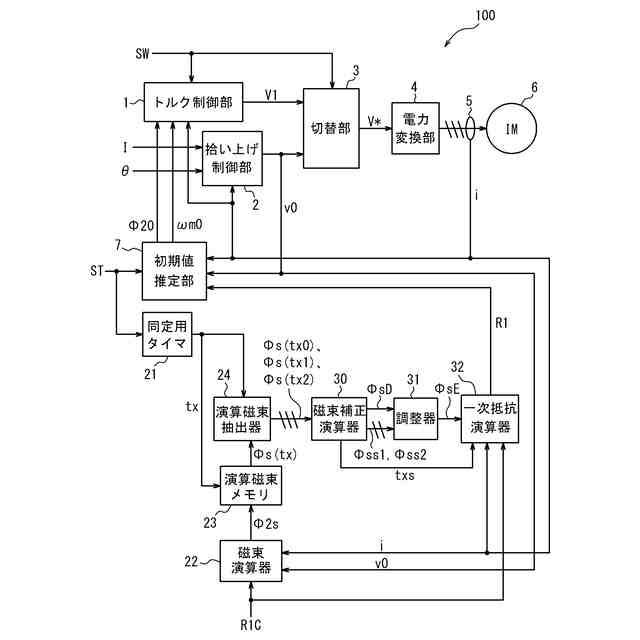
【解決手段】制御装置10は、電動機6に流れる電流ベクトルに基づいて、電動機6に直流電流を流す拾い上げ電圧指令を出力する拾い上げ制御部2と、電流ベクトルと、拾い上げ電圧指令と、電動機6の一次抵抗ノミナル値とに基づき、演算磁束ベクトルを出力する磁束演算器22と、同定時刻までの演算磁束ベクトルから、等間隔の3つの時点における演算磁束ベクトルを抽出する演算磁束抽出器24と、3つの時点における演算磁束ベクトルに基づき、磁束補正値と、相対磁束ベクトルと、3つの時点の時刻間隔とを出力する磁束補正演算器30と、磁束補正値と、相対磁束ベクトルとに基づき、磁束補正調整値を出力する調整器31と、電流ベクトルと、一次抵抗ノミナル値と、時刻間隔と、磁束補正調整値とに基づき、電動機6の一次抵抗を演算する一次抵抗演算器32と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
電動機の制御装置であって、
前記電動機に流れる電流ベクトルを検出する電流検出器と、
前記電流ベクトルに基づいて、前記電動機に直流電流を流す拾い上げ電圧指令を出力する拾い上げ制御部と、
前記電流ベクトルと、前記拾い上げ電圧指令と、前記電動機の一次抵抗ノミナル値とに基づき、演算磁束ベクトルを出力する磁束演算器と、
同定時刻までの前記演算磁束ベクトルから、等間隔の3つの時点における演算磁束ベクトルを抽出する演算磁束抽出器と、
前記3つの時点における演算磁束ベクトルに基づき、磁束補正値と、相対磁束ベクトルと、前記3つの時点の時刻間隔とを出力する磁束補正演算器と、
前記磁束補正値と、前記相対磁束ベクトルとに基づき、磁束補正調整値を出力する調整器と、
前記電流ベクトルと、前記一次抵抗ノミナル値と、前記時刻間隔と、前記磁束補正調整値とに基づき、前記電動機の一次抵抗を演算する一次抵抗演算器と、を備える制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動機のトルク制御を行う制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
電動機のメンテナンス性の向上、および、電動機の小型・高出力化の観点より、速度センサが設けられていない(速度センサを用いない)電動機の制御装置(いわゆる、速度センサレス電動機制御装置)が知られている(例えば、特許文献1参照)。このような制御装置で電動機のトルクを制御する際には一般に、電動機の速度(角速度)を推定する必要がある。
【0003】
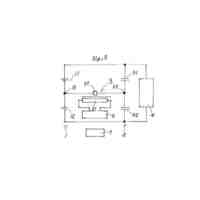
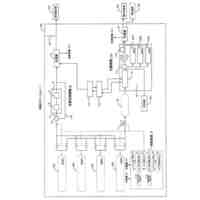
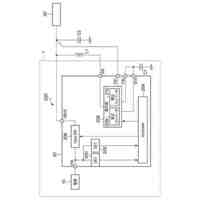
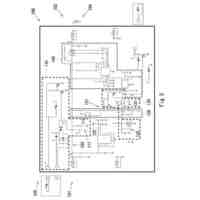
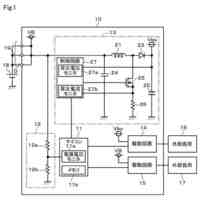
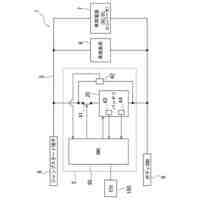
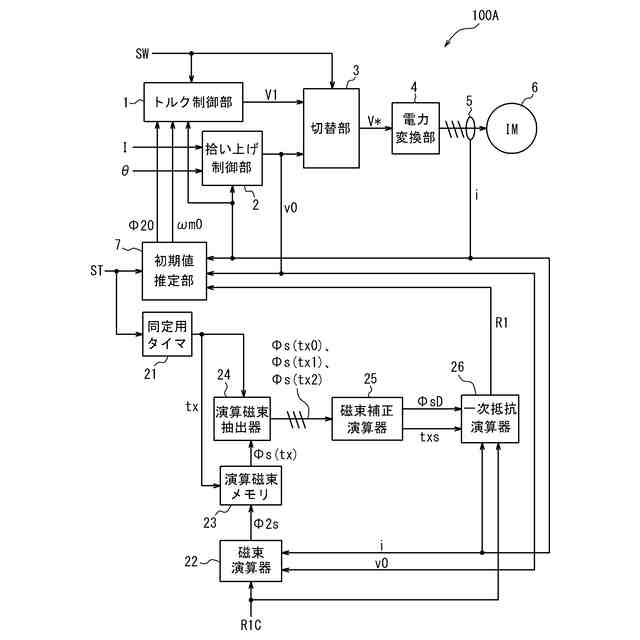
図3は、速度センサを用いない、いわゆる速度センサレス電動機制御装置である従来の制御装置100Aの構成例を示す図である。
【0004】
図3に示すように、制御装置100Aは、トルク制御部1と、拾い上げ制御部2と、切替部3と、電力変換部4と、電流検出部5と、初期値推定部7と、同定用タイマ21と、磁束演算器22と、演算磁束メモリ23と、演算磁束抽出器24と、磁束補正演算器25と、一次抵抗演算器26とを備える。まず、トルク制御部1、拾い上げ制御部2、切替部3、電力変換部4、電流検出部5および初期値推定部7の動作について説明する。同定用タイマ21、磁束演算器22、演算磁束メモリ23、演算磁束抽出器24、磁束補正演算器25および一次抵抗演算器26の動作については後述する。
【0005】
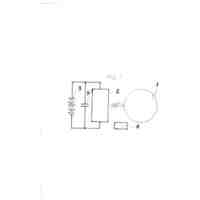
電流検出部5は、電動機6に流れる電流ベクトルiを検出し、トルク制御部1、拾い上げ制御部2、初期値推定部7、磁束演算器22および一次抵抗演算器26に出力する。
【0006】
拾い上げ制御部2は、電流ベクトルiと、直流電流指令Iと、電流位相角指令θとが入力される。拾い上げ制御部2は、電流ベクトルiと、直流電流指令Iと、電流位相角指令θとに基づき、直流電流指令Iおよび電流位相角指令θに指示される直流電流を電動機6に流すための拾い上げ電圧指令v0を生成し、切替部3、初期値推定部7および磁束演算器22に出力する。
【0007】
初期値推定部7は、電流ベクトルiと、拾い上げ電圧指令v0と、電動機6の一次抵抗R1と、拾い上げ制御開始指令STとが入力される。初期値推定部7は、電流ベクトルiと、拾い上げ電圧指令v0と、電動機6の一次抵抗R1とに基づき、電動機6の初期速度ωm0および初期二次磁束φ20を演算し、トルク制御部1に出力する。
【0008】
トルク制御部1は、トルク制御開始指令SWと、電流ベクトルiと、初期速度ωm0と、初期二次磁束φ20とが入力される。トルク制御部1は、トルク制御開始指令SWがオンになると、初期速度ωm0および初期二次磁束φ20を初期値として、電流ベクトルiに基づき、電動機6のトルクを制御するトルク制御電圧指令V1を生成し、切替部3に出力する。なお、電動機6の電源が投入された時点では、トルク制御開始指令SWはオフの状態となっている。
【0009】
切替部3は、トルク制御開始指令SWと、拾い上げ電圧指令v0と、トルク制御電圧指令V1とが入力される。切替部3は、トルク制御開始指令SWがオンになるまでは、拾い上げ電圧指令v0を電圧指令V*として電力変換部4に出力し、トルク制御開始指令SWがオンになると、トルク制御電圧指令V1を電圧指令V*として電力変換部4に出力する。
【0010】
電力変換部4は、電圧指令V*を増幅して電動機6に電力を供給する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
電気推進システム
18日前
個人
バッテリ用交流電流供給回路
18日前
西芝電機株式会社
回転電機
1日前
株式会社アイシン
回転電機
1日前
オリオン機械株式会社
電源装置
8日前
大和電器株式会社
配線器具
15日前
株式会社レクザム
制御装置
4日前
大和電器株式会社
配線器具
15日前
豊田合成株式会社
送電装置
2日前
個人
スイッチドリラクタンスモータ装置
2日前
株式会社ダイヘン
開閉装置
2日前
株式会社タツノ
供給ステーション
2日前
未来工業株式会社
配線ボックス装置
17日前
株式会社ミツバ
モータ
8日前
ミツミ電機株式会社
駆動回路
8日前
西芝電機株式会社
回転電機の回転子
8日前
ニチコン株式会社
スイッチング電源
15日前
ローム株式会社
電源システム
11日前
株式会社ダイヘン
電力変換装置
9日前
ミネベアミツミ株式会社
モータ
1日前
株式会社デンソー
バーニアモータ
2日前
住友電装株式会社
ワイヤハーネス
8日前
トライス株式会社
銅黒鉛質ブラシ
17日前
株式会社アイシン
駆動装置
8日前
サンデン株式会社
車載電動コンプレッサ
3日前
コアレスモータ株式会社
発電装置
15日前
株式会社デンソー
制御装置
1日前
トヨタ自動車株式会社
回生回路内蔵デバイス
2日前
株式会社アイシン
電動アクチュエータ
3日前
学校法人金沢工業大学
高周波整流回路
1日前
東洋電機製造株式会社
制御装置
2日前
株式会社カーメイト
携帯端末用充電器
18日前
シンフォニアテクノロジー株式会社
回転電機
8日前
株式会社デンソー
電子制御装置
2日前
トヨタ自動車株式会社
リレー切替方法
11日前
マレリ株式会社
車両用電源装置
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ