TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024087169
公報種別
公開特許公報(A)
公開日
2024-07-01
出願番号
2022201814
出願日
2022-12-19
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
A01C
11/02 20060101AFI20240624BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業機の装着が不完全な状態で自律走行が開始される場合に比べて、時間や手間の無駄を削減すること。
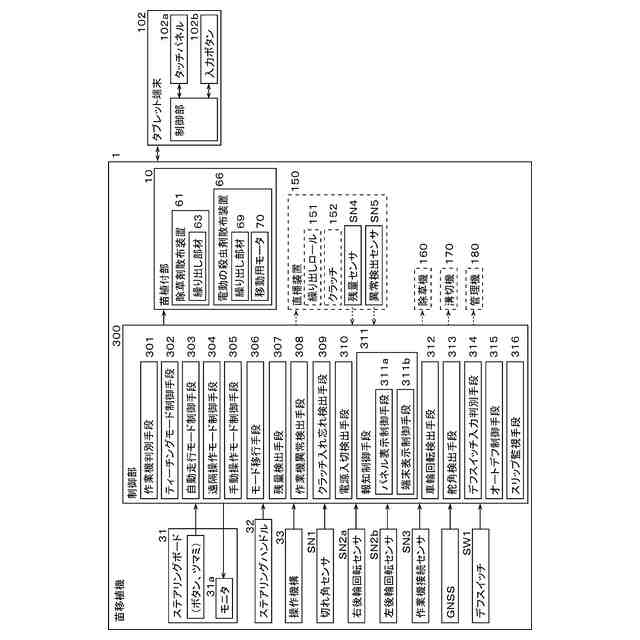
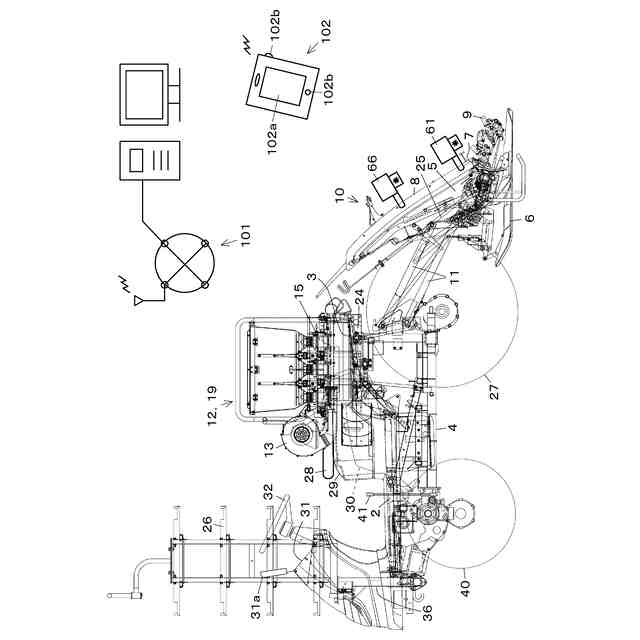
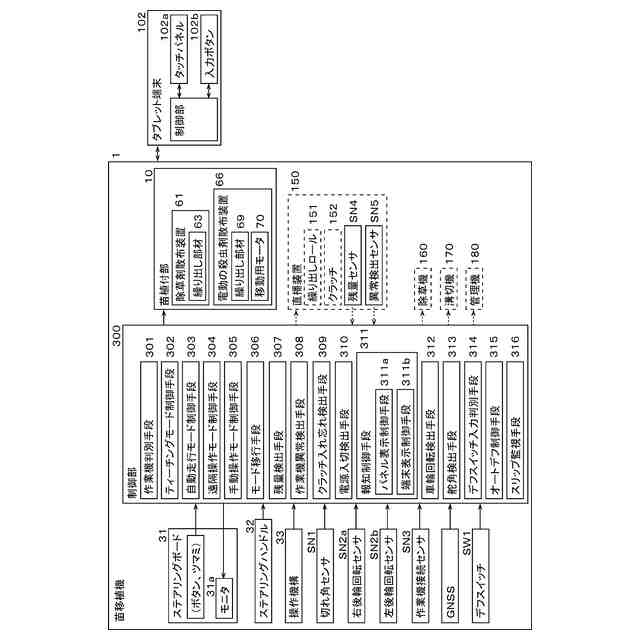
【解決手段】圃場に対して作業を行う作業機(10,150,160,170,180)が着脱可能な車体(4)と、作業機(10,150,160,170,180)が取り外されている場合には基準データ取得モードと自動走行モードと遠隔操作モードへの移行を規制する制御手段(300)と、を備えたことを特徴とする作業車両(1)。
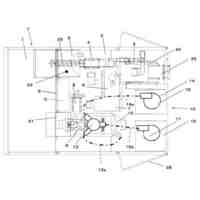
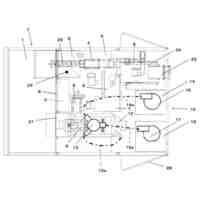
【選択図】図4
特許請求の範囲
【請求項1】
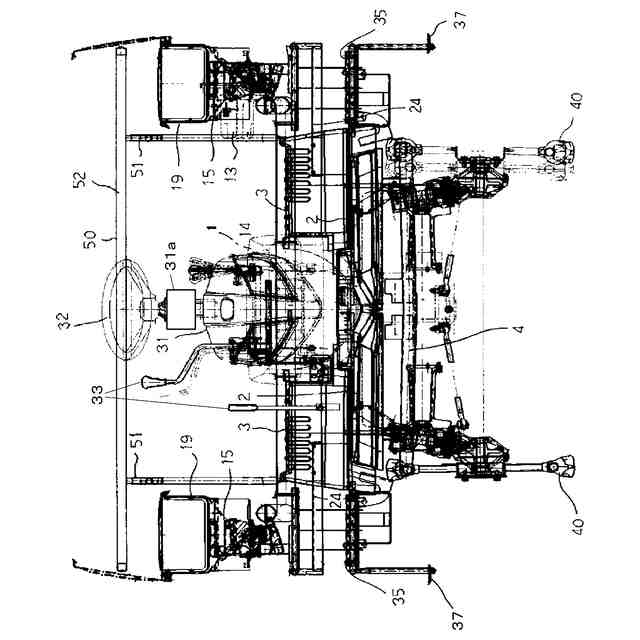
圃場に対して作業を行う作業機(10,150,160,170,180)が着脱可能な車体(4)と、
圃場の外周の基準となる箇所に沿って前記車体(4)を走行させて基準データを取得する基準データ取得モードと、前記基準データに基づいて前記車体(4)を自動的に走行させる自動走行モードと、前記車体(4)の走行を遠隔操作可能な遠隔操作具(102)からの入力に基づいて前記車体(4)を走行させる遠隔操作モードと、を切り替えて制御する制御手段(300)であって、前記作業機(10,150,160,170,180)が取り外されている場合には、前記基準データ取得モードと前記自動走行モードと前記遠隔操作モードへの移行を規制する前記制御手段(300)と、
を備えたことを特徴とする作業車両。
続きを表示(約 1,400 文字)
【請求項2】
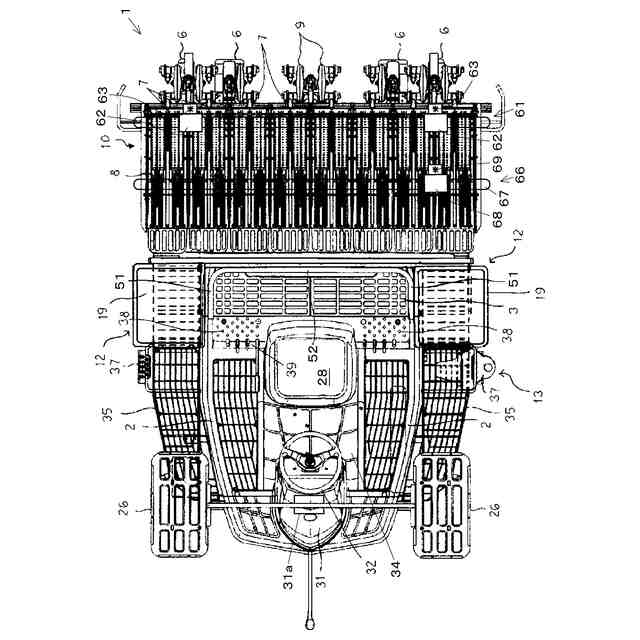
前記作業機として、種子を圃場に播く直播装置(150)、マット状の苗から苗を圃場に植え付ける植付装置(10)、圃場の草を除去する除草機(160)、圃場内の水の流路を形成する溝切機(170)、および、薬剤の散布を行う管理機(180)のいずれかの作業機が装着可能な前記車体(4)と、
前記除草機(160)、前記溝切機(170)および前記管理機(180)のいずれかが装着された場合には、前記基準データ取得モードと前記自動走行モードと前記遠隔操作モードとの間でのモードの移行を規制する前記制御手段(300)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項3】
作業者が搭乗可能な座席(28)と、前記座席(28)に搭乗した作業者が走行の操作を行う走行操作具(32)と、を有する前記車体(4)と、
前記基準データ取得モードと前記自動走行モードと前記遠隔操作モードと前記走行操作具(32)の操作に基づいて前記車体(4)を走行させる手動走行モードとを切り替えて制御する前記制御手段(300)であって、前記作業機(10,150,160,170,180)として前記直播装置(150)または前記植付装置(10)が装着され且つ前記基準データ取得モード、前記自動走行モードおよび前記遠隔操作モードのいずれかのモードが実行中に、前記作業機(10,150)が取り外された場合には、前記手動走行モードに強制的に移行させる前記制御手段(300)と、
を備えたことを特徴とする請求項2に記載の作業車両。
【請求項4】
前記直播装置(150)が装着された状態で作業中に播種する種子の減少が検出された場合には、前記遠隔操作具(102)に種子の減少を報知させる前記制御手段(300)、
を備えたことを特徴とする請求項2に記載の作業車両。
【請求項5】
前記直播装置(150)が装着された状態で作業中に、種子を送り出す部材(151)の異常が検出された場合には、前記遠隔操作具(102)に異常を報知させる前記制御手段(300)、
を備えたことを特徴とする請求項2に記載の作業車両。
【請求項6】
前記直播装置(150)が装着され且つ前記直播装置(150)を作動させるクラッチ(152)の入切を制御する前記制御手段(300)であって、作業中に前記クラッチ(152)が切られた状態が予め定められた期間継続した場合には、前記手動走行モードでは前記クラッチ(152)の入れ忘れを前記遠隔操作具(102)に報知させると共に、前記自動走行モードと前記遠隔操作モードでは作業中に前記クラッチ(152)が切られた状態が予め定められた期間継続しても前記遠隔操作具(102)に報知させない前記制御手段(300)、
を備えたことを特徴とする請求項3に記載の作業車両。
【請求項7】
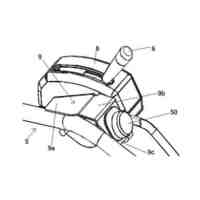
除草剤を圃場に散布する電動の除草剤散布装置(61)と、殺虫殺菌剤を苗に散布する電動の殺虫剤散布装置(66)と、を有する前記植付装置(10)と、
前記車体(4)に設けられた表示部(31a)に、前記除草剤散布装置(61)および前記殺虫剤散布装置(66)の電源の入切状態を表示させる前記制御手段(300)と、
を備えたことを特徴とする請求項2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、田植機やトラクタ等の作業車両に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
田植機やトラクタ等の作業車両において、作業機として苗植付装置(20)や除草装置(40)が選択的に装着可能な乗用型田植え機において、軽量の作業機が装着された状態での最高速度を規制するために、作業機が装着されていない場合や除草装置(40)が装着されている場合にはエンジン回転数を検出して、エンジン回転数が許容値を超えると警報を発し、苗植付装置(20)が装着されている場合にはエンジン回転数の検出を行わない技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2008-79515号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術のように作業機を着脱、交換可能な作業車両では、作業機と車両本体とを接続するコネクタの接続忘れや完全に接続されていない等で作業機の装着が不完全な状態であったり、作業機が取り外された状態で、誤って走行される場合がある。
作業機の装着が不完全または取り外された状態で自律走行(自動走行、無人走行)を行うと、作業機が圃場に降下するが回転、駆動されなかったりして作業が行われなかったり、作業機が破損したりする恐れがある。特に、自律走行を行う技術では、自律走行経路を作成する前に、圃場の外周に沿って作業車両を走行させて、自律走行時の基準となる圃場の範囲を取得する動作(基準データ取得モード、ティーチングモード)が一般的に行われるが、作業機の接続が不完全な状態でティーチングモードが実行された後に作業機の装着不完全が判明しても、作業機の装着不完全の解消後に再度ティーチングモードを実行することとなり、時間や手間が無駄になってしまう問題がある。
【0005】
本発明は、作業機の装着が不完全な状態で自律走行が開始される場合に比べて、時間や手間の無駄を削減することを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は次の解決手段により解決される。
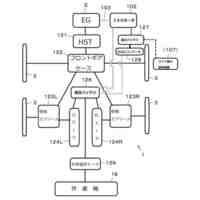
請求項1に記載の発明は、圃場に対して作業を行う作業機(10,150,160,170,180)が着脱可能な車体(4)と、圃場の外周の基準となる箇所に沿って前記車体(4)を走行させて基準データを取得する基準データ取得モードと、前記基準データに基づいて前記車体(4)を自動的に走行させる自動走行モードと、前記車体(4)の走行を遠隔操作可能な遠隔操作具(102)からの入力に基づいて前記車体(4)を走行させる遠隔操作モードと、を切り替えて制御する制御手段(300)であって、前記作業機(10,150,160,170,180)が取り外されている場合には、前記基準データ取得モードと前記自動走行モードと前記遠隔操作モードへの移行を規制する前記制御手段(300)と、を備えたことを特徴とする作業車両である。
【0007】
請求項2に記載の発明は、前記作業機として、種子を圃場に播く直播装置(150)、マット状の苗から苗を圃場に植え付ける植付装置(10)、圃場の草を除去する除草機(160)、圃場内の水の流路を形成する溝切機(170)、および、薬剤の散布を行う管理機(180)のいずれかの作業機が装着可能な前記車体(4)と、前記除草機(160)、前記溝切機(170)および前記管理機(180)のいずれかが装着された場合には、前記基準データ取得モードと前記自動走行モードと前記遠隔操作モードとの間でのモードの移行を規制する前記制御手段(300)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【0008】
請求項3に記載の発明は、作業者が搭乗可能な座席(28)と、前記座席(28)に搭乗した作業者が走行の操作を行う走行操作具(32)と、を有する前記車体(4)と、前記基準データ取得モードと前記自動走行モードと前記遠隔操作モードと前記走行操作具(32)の操作に基づいて前記車体(4)を走行させる手動走行モードとを切り替えて制御する前記制御手段(300)であって、前記作業機(10,150,160,170,180)として前記直播装置(150)または前記植付装置(10)が装着され且つ前記基準データ取得モード、前記自動走行モードおよび前記遠隔操作モードのいずれかのモードが実行中に、前記作業機(10,150)が取り外された場合には、前記手動走行モードに強制的に移行させる前記制御手段(300)と、を備えたことを特徴とする請求項2に記載の作業車両である。
【0009】
請求項4に記載の発明は、前記直播装置(150)が装着された状態で作業中に播種する種子の減少が検出された場合には、前記遠隔操作具(102)に種子の減少を報知させる前記制御手段(300)、を備えたことを特徴とする請求項2に記載の作業車両である。
【0010】
請求項5に記載の発明は、前記直播装置(150)が装着された状態で作業中に、種子を送り出す部材(151)の異常が検出された場合には、前記遠隔操作具(102)に異常を報知させる前記制御手段(300)、を備えたことを特徴とする請求項2に記載の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
精米設備
今日
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
苗移植機
2日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
苗移植機
6日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
施肥作業機
1日前
井関農機株式会社
コンバイン
1日前
井関農機株式会社
コンバイン
1日前
井関農機株式会社
電動散布機
2日前
井関農機株式会社
籾摺精米設備
今日
井関農機株式会社
無人散布作業機
2日前
井関農機株式会社
汎用コンバインの刈取部
今日
個人
蠅捕獲器
5日前
個人
遠投コマセ籠
6日前
個人
防護柵
20日前
個人
多機能の除草具
9日前
個人
動物用ケージ
28日前
個人
釣り用ルアー
6日前
井関農機株式会社
作業車両
20日前
個人
アスパラガスの栽培方法
14日前
井関農機株式会社
歩行型管理機
14日前
井関農機株式会社
歩行型管理機
27日前
井関農機株式会社
収穫作業車両
23日前
井関農機株式会社
歩行型管理機
14日前
個人
ウナギ目仔魚形質測定装置
15日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
13日前
株式会社オーツボ
海苔箱船
13日前
個人
除草方法
16日前
松山株式会社
農作業機
16日前
松山株式会社
農作業機
20日前
井関農機株式会社
コンバイン
1日前
井関農機株式会社
施肥作業機
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ