TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024081181
公報種別
公開特許公報(A)
公開日
2024-06-18
出願番号
2022194610
出願日
2022-12-06
発明の名称
情報処理装置、制御方法及びプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20240611BHJP(制御;調整)
要約
【課題】複数の移動体の移動効率を向上することである。
【解決手段】複数の移動体のそれぞれの走行予定の経路情報を取得する経路情報取得手段と、前記経路情報取得手段が取得した経路を複数の区間に分割し、区間内に存在する移動体の密度を表す混雑度を区間ごとに算出する混雑度算出手段と、前記混雑度算出手段が算出した混雑度に基づいて、移動体が他の移動体に追従走行する追従走行区間を決定し、前記複数の移動体のそれぞれに対して前記追従走行区間内で追従するか否か決定する追従走行計画手段と、前記追従走行計画手段が決定した追従走行計画に従って前記複数の移動体のそれぞれへの制御指示を決定する制御指示決定手段と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
複数の移動体の走行経路を計画する情報処理装置であって、
前記複数の移動体のそれぞれの走行予定の経路情報を取得する経路情報取得手段と、
前記経路情報取得手段が取得した経路を複数の区間に分割し、区間内に存在する移動体の密度を表す混雑度を区間ごとに算出する混雑度算出手段と、
前記混雑度算出手段が算出した混雑度に基づいて、移動体が他の移動体に追従走行する追従走行区間を決定し、前記複数の移動体のそれぞれに対して前記追従走行区間内で追従するか否か決定する追従走行計画手段と、
前記追従走行計画手段が決定した追従走行計画に従って前記複数の移動体のそれぞれへの制御指示を決定する制御指示決定手段と、
を備えることを特徴とする情報処理装置。
続きを表示(約 1,800 文字)
【請求項2】
前記複数の移動体のそれぞれをその属性ごとに分類してグループ化する属性分類手段をさらに有し、
前記追従走行計画手段は、前記属性分類手段が分類したグループごとに隊列となって追従走行するか否か及び追従走行区間を決定する、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記属性は、前記複数の移動体のそれぞれの経路における目的位置、前記複数の移動体のそれぞれの走行速度、及び前記複数の移動体のそれぞれの大きさの少なくとも一つである、
ことを特徴とする請求項2に記載の情報処理装置。
【請求項4】
前記制御指示決定手段は、追従走行区間内で追従走行する移動体に対して、走行速度、前方の移動体との距離間隔、及び該移動体に搭載するセンサの計測パラメータの少なくともいずれかを決定する、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項5】
表示手段をさらに備え、
前記表示手段は、前記追従走行計画手段が決定した追従走行に関する情報及び前記制御指示決定手段が決定した前記複数の移動体のそれぞれに対する制御指示情報の少なくとも一方を表示装置に対して出力する、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項6】
複数の移動体の走行経路を計画する情報処理装置の制御方法であって、
前記複数の移動体のそれぞれの走行予定の経路情報を取得する経路情報取得工程と、
前記経路情報取得工程で取得した経路を複数の区間に分割し、区間内に存在する移動体の密度を表す混雑度を区間ごとに算出する混雑度算出工程と、
前記混雑度算出工程で算出した混雑度に基づいて、移動体が他の移動体に追従走行する追従走行区間を決定し、前記複数の移動体のそれぞれに対して前記追従走行区間内で追従するか否か決定する追従走行計画工程と、
前記追従走行計画工程で決定した追従走行計画に従って前記複数の移動体のそれぞれへの制御指示を決定する制御指示決定工程と、
を備えることを特徴とする制御方法。
【請求項7】
請求項1乃至5のいずれか1つに記載の各手段としてコンピュータを機能させるためのコンピュータプログラム。
【請求項8】
複数の移動体の走行経路を計画するための情報処理装置であって、
前記複数の移動体の各移動体の走行予定の経路情報を取得する経路情報取得手段と、
前記経路情報取得手段が取得した経路に基づいて、出発位置及び目的位置の少なくとも一方に基づきエリア分割し、分割されたエリアごとに前記複数の移動体のそれぞれが共通して通過する経路区間を推定する共通経路推定手段と、
前記共通経路推定手段が推定した共通経路区間を、移動体が他の移動体に追従走行する追従走行区間として決定し、前記複数の移動体のそれぞれに対して前記追従走行区間内で追従するか否か決定する追従走行計画手段と、
前記追従走行計画手段が決定した追従走行計画に従って前記複数の移動体のそれぞれへの制御指示を決定する制御指示決定手段と、
を備えることを特徴とする情報処理装置。
【請求項9】
複数の移動体の走行経路を計画するための情報処理装置の制御方法であって、
前記複数の移動体の各移動体の走行予定の経路情報を取得する経路情報取得工程と、
前記経路情報取得工程で取得した経路に基づいて、出発位置及び目的位置の少なくとも一方に基づきエリア分割し、分割されたエリアごとに前記複数の移動体のそれぞれが共通して通過する経路区間を推定する共通経路推定工程と、
前記共通経路推定工程で推定した共通経路区間を、移動体が他の移動体に追従走行する追従走行区間として決定し、前記複数の移動体のそれぞれに対して前記追従走行区間内で追従するか否か決定する追従走行計画工程と、
前記追従走行計画工程で決定した追従走行計画に従って前記複数の移動体のそれぞれへの制御指示を決定する制御指示決定工程と、
を備えることを特徴とする制御方法。
【請求項10】
請求項8に記載の各手段としてコンピュータを機能させるためのコンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、制御方法及びプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
工場や倉庫において物品を搬送するために、無人搬送車(AGV(Automated Guided Vehicle))など自動で移動させる移動体の普及が進んでいる。搬送効率を高める方法として、例えば、特許文献1では、先行搬送車との車間距離が予め設定された距離以下になった場合に、先行搬送車との車間距離を一定に保つように追従制御を実行するという技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-177437号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1は前方の搬送車に追従するか否かを制御する方法であるため、複数の移動体が走行する環境においては移動効率が低い。
【0005】
本発明は上記問題に鑑みてなされたものであり、複数の移動体の移動効率を向上することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一実施形態の情報処理装置は、複数の移動体の走行経路を計画する情報処理装置であって、前記複数の移動体のそれぞれの走行予定の経路情報を取得する経路情報取得手段と、前記経路情報取得手段が取得した経路を複数の区間に分割し、区間内に存在する移動体の密度を表す混雑度を区間ごとに算出する混雑度算出手段と、前記混雑度算出手段が算出した混雑度に基づいて、移動体が他の移動体に追従走行する追従走行区間を決定し、前記複数の移動体のそれぞれに対して前記追従走行区間内で追従するか否か決定する追従走行計画手段と、前記追従走行計画手段が決定した追従走行計画に従って前記複数の移動体のそれぞれへの制御指示を決定する制御指示決定手段と、を備えることを特徴とする。
【0007】
また本発明の別の実施形態の情報処理装置は、複数の移動体の走行経路を計画するための情報処理装置であって、前記複数の移動体の各移動体の走行予定の経路情報を取得する経路情報取得手段と、前記経路情報取得手段が取得した経路に基づいて、出発位置及び目的位置の少なくとも一方に基づきエリア分割し、分割されたエリアごとに前記複数の移動体のそれぞれが共通して通過する経路区間を推定する共通経路推定手段と、前記共通経路推定手段が推定した共通経路区間を、移動体が他の移動体に追従走行する追従走行区間として決定し、前記複数の移動体のそれぞれに対して前記追従走行区間内で追従するか否か決定する追従走行計画手段と、前記追従走行計画手段が決定した追従走行計画に従って前記複数の移動体のそれぞれへの制御指示を決定する制御指示決定手段と、を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、複数の移動体の移動効率を向上することができる。
【図面の簡単な説明】
【0009】
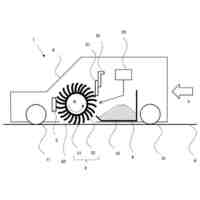
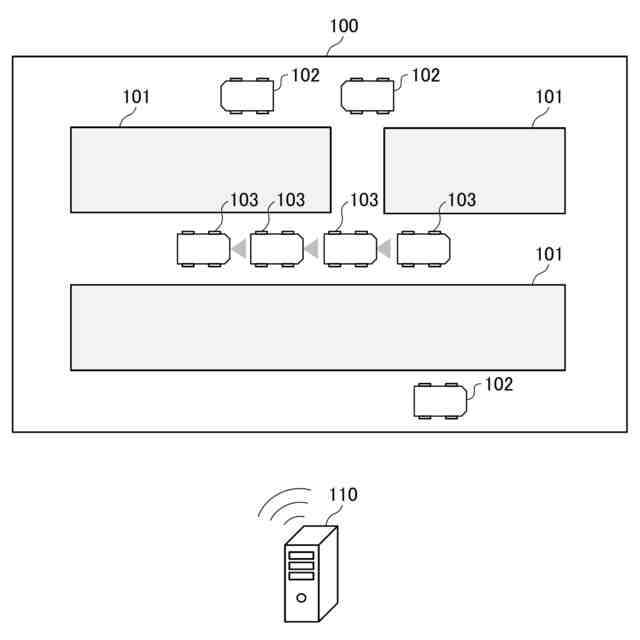
本発明の実施形態1に係る情報処理装置の利用状況を示す図である。
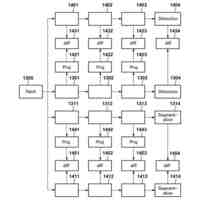
実施形態1に係る情報処理装置の機能構成例を示すブロック図である。
情報処理装置のハードウェア構成の一例を示す図である。
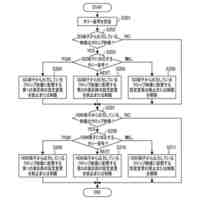
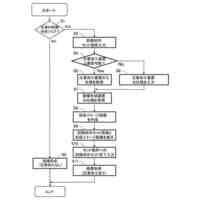
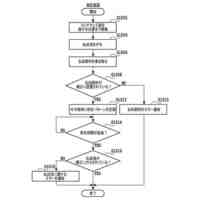
実施形態1において情報処理装置が実行する処理を示すフローチャートである。
混雑度算出方法を説明する図である。
追従走行計画処理を示すフローチャートである。
目的地ごとのグループ化方法を説明する図である。
追従走行区間決定方法を説明する図である。
制御指示決定処理を示すフローチャートである。
追従走行開始位置の決定方法を説明する図である。
情報処理装置におけるGUIの一例を示す図である。
実施形態2に係る情報処理装置の機能構成例を示すブロック図である。
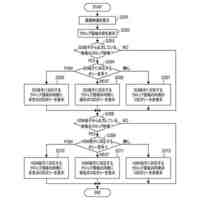
実施形態2において情報処理装置が実行する処理を示すフローチャートである。
共通経路推定処理を説明する図である。
【発明を実施するための形態】
【0010】
[実施形態1]
以下、本発明の実施形態1について説明する。実施形態1では、複数の移動体を制御して物品を搬送する自動搬送システムに対して本発明を適用した例を説明する。本システムでは、搬送タスクに基づいて生成した経路を管理下の複数の移動体に移動制御指示として与えることで、指示が与えられた各移動体は目的地まで自律走行により物品を搬送する。しかし、同じ領域内を同時刻に移動する移動体の数が増えると移動体同士で干渉する可能性が増え、渋滞を招く恐れがある。そこで、すべての移動体の走行予定経路を複数の区間に分割し、区間ごとに混雑度を算出し、混雑度が高い区間は他の移動体に追従走行させることで移動体間の距離を詰めて密に走行させる。混雑度は、区間内に同時に存在する移動体の密度を表すものである。本発明の実施形態1に係る情報処理装置は、複数の移動体を制御して物品を搬送する自動搬送システムの制御を実施する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
基板
9日前
キヤノン株式会社
トナー
2日前
キヤノン株式会社
記録装置
9日前
キヤノン株式会社
光学機器
16日前
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
電子機器
2日前
キヤノン株式会社
電子機器
3日前
キヤノン株式会社
電子機器
2日前
キヤノン株式会社
清掃装置
4日前
キヤノン株式会社
記録装置
2日前
キヤノン株式会社
撮像装置
3日前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
有機発光素子
4日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
カートリッジ
16日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
有機発光素子
4日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
組成識別装置
2日前
キヤノン株式会社
ヘッド用基板
11日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成システム
9日前
キヤノン株式会社
画像形成システム
9日前
キヤノン株式会社
画像形成システム
9日前
キヤノン株式会社
画像形成システム
9日前
キヤノン株式会社
エポキシ樹脂組成物
4日前
キヤノン株式会社
記録装置および制御方法
2日前
キヤノン株式会社
インクジェット記録装置
9日前
キヤノン株式会社
学習装置および学習方法
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ