TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024080495
公報種別
公開特許公報(A)
公開日
2024-06-13
出願番号
2022193736
出願日
2022-12-02
発明の名称
プラント操業支援装置
出願人
株式会社TMEIC
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G05B
23/02 20060101AFI20240606BHJP(制御;調整)
要約
【課題】オペレータの経験や技量に関わらず手動介入の精度を向上させることが可能なプラント操業支援装置を提供する。
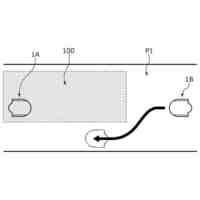
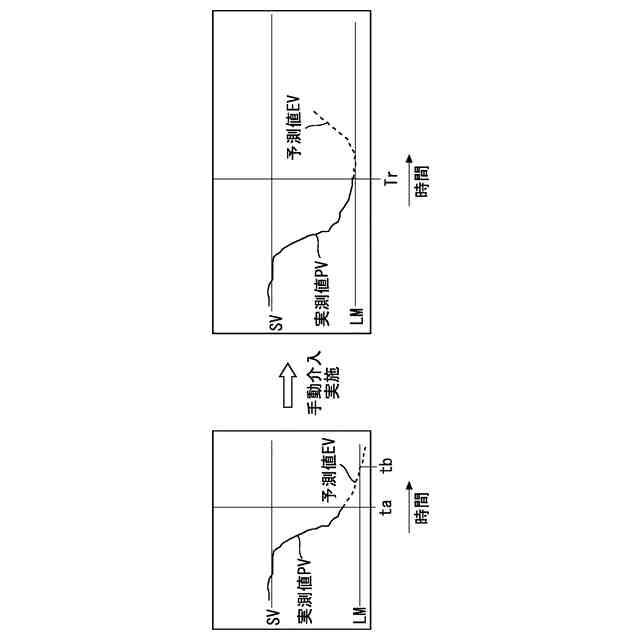
【解決手段】プラント操業支援装置は、プラントのプロセスに対応するプロセスモデルを用いて、プロセスのプロセス値の変化を予測する予測処理部を備える。予測処理部は、プロセス値が予め設定した閾値を超過すると予測された後、プラントのオペレータにより手動介入が実施された場合に、実施された手動介入を加味したプロセス値の変化を予測すると共に、実施された手動介入とは異なる手動介入を想定し、想定した手動介入を加味したプロセス値の変化も予測する。プラント操業支援装置は、実施された手動介入を加味したプロセス値の第1トレンドグラフと共に、想定した手動介入を加味したプロセス値の第2トレンドグラフを重畳表示する表示処理部を更に備える。
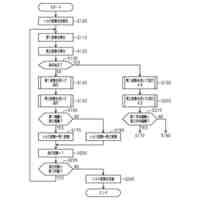
【選択図】図1
特許請求の範囲
【請求項1】
プラントの操業を支援するプラント操業支援装置において、
前記プラントのプロセスに対応するプロセスモデルを用いて、前記プロセスのプロセス値の変化を予測する予測処理部を備え、
前記予測処理部は、前記プロセス値が予め設定した閾値を超過すると予測された後、前記プラントのオペレータにより手動介入が実施された場合に、実施された前記手動介入を加味した前記プロセス値の変化を予測すると共に、実施された前記手動介入とは異なる手動介入を想定し、想定した前記手動介入を加味した前記プロセス値の変化も予測し、
実施された前記手動介入を加味した前記プロセス値の第1トレンドグラフと共に、想定した前記手動介入を加味した前記プロセス値の第2トレンドグラフを重畳表示する表示処理部を更に備えるプラント操業支援装置。
続きを表示(約 300 文字)
【請求項2】
前記表示処理部は、前記第1トレンドグラフ及び前記第2トレンドグラフが重畳表示されるトレンド画面とは異なる画面に、前記実施された前記手動介入の内容と、想定した前記手動介入の内容とを対比表示する請求項1に記載のプラント操業支援装置。
【請求項3】
前記予測処理部は、前記プロセス値が前記閾値を超過する始点を予測した後、前記手動介入の実施により前記閾値を超過しない終点を予測し、
前記表示処理部は、前記始点から前記終点までの区間における前記第1トレンドグラフ及び前記第2トレンドグラフを重畳表示する請求項1または請求項2に記載のプラント操業支援装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、プラントの操業を支援するプラント操業支援装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
下記特許文献1に開示された運転支援装置は、火力発電プラント等のプラントから得られるプラントデータと、プラントシミュレータを用いて計算したシュミレータデータとを入力とし、所定のプロセス値とその目標値との偏差を指標として制御パラメータの値を修正するパラメータ修正手段を備える。
【0003】
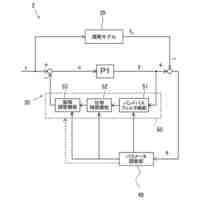
プラントシミュレータの1つであるダイナミックシミュレータは、プロセスモデルを用いてプロセス値の動的挙動予測を行う機能を持つ。運転支援装置は、プロセス値が目標値になるように、制御パラメータをフィードバック制御(例えばPID制御)している。
【0004】
ところで、上記フィードバック制御を実行しても、予測したプロセス値が予め決められた許容値を超えると予測される場合がある。この場合、アラームを発生し、プラントのオペレータに対してマニュアル制御の対応を促すことがある。マニュアル制御は、オペレータが制御パラメータを手動で操作する所謂手動介入である。手動介入は、下記特許文献2に開示された操作・監視手段を用いて行うことができる。手動介入を実施した後、オペレータは予測したプロセス値が許容した許容値を超えないことを確認する。
【先行技術文献】
【特許文献】
【0005】
特許第4546332号
特開2002-92584号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、手動介入はオペレータの経験や技量に依存する部分が多いため、手動介入による制御パラメータの操作量やタイミングのような操作内容は必ずしも適切ではない。このため、操作内容の妥当性を評価し、次回の手動介入に反映させることで、オペレータの経験や技量に関わらず手動介入の精度を向上させることが望まれる。
【0007】
そこで、本開示は、オペレータの経験や技量に関わらず手動介入の精度を向上させることが可能なプラント操業支援装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
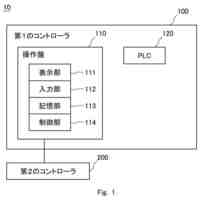
本開示の第1の観点は、プラントの操業を支援するプラント操業支援装置に関連する。前記プラント操業支援装置は、前記プラントのプロセスに対応するプロセスモデルを用いて、前記プロセスのプロセス値の変化を予測する予測処理部を備える。前記予測処理部は、前記プロセス値が予め設定した閾値を超過すると予測された後、前記プラントのオペレータにより手動介入が実施された場合に、実施された前記手動介入を加味した前記プロセス値の変化を予測すると共に、実施された前記手動介入とは異なる手動介入を想定し、想定した前記手動介入を加味した前記プロセス値の変化も予測する。前記プラント操業支援装置は、実施された前記手動介入を加味した前記プロセス値の第1トレンドグラフと共に、想定した前記手動介入を加味した前記プロセス値の第2トレンドグラフを重畳表示する表示処理部を更に備える。
【0009】
第2の観点は、第1の観点に加えて次の特徴を更に有する。前記表示処理部は、前記第1トレンドグラフ及び前記第2トレンドグラフが重畳表示されるトレンド画面とは異なる画面に、前記前記実施された前記手動介入の内容と、想定した前記手動介入の内容とを対比表示する。
【0010】
第3の観点は、第1の観点または第2の観点に加えて次の特徴を更に有する。前記予測処理部は、前記プロセス値が前記閾値を超過する始点を予測した後、前記手動介入の実施により前記閾値を超過しない終点を予測する。前記表示処理部は、前記始点から前記終点までの区間における前記第1トレンドグラフ及び前記第2トレンドグラフを重畳表示する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
自動走行体
10日前
株式会社FUJI
工作機械
1か月前
エイブリック株式会社
基準電流回路
1か月前
ローム株式会社
電源回路
2か月前
日昌電気制御株式会社
管理システム
2か月前
トヨタ自動車株式会社
制御システム
1か月前
トヨタ自動車株式会社
移動システム
2か月前
株式会社ユタカ
半自動切換装置
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
マーカースタンド
2か月前
株式会社豊田自動織機
自律走行車両
2か月前
株式会社フカデン
外周部加工システム
20日前
株式会社デンソー
電子制御装置
9日前
大阪瓦斯株式会社
二次圧制御機構
27日前
ミツミ電機株式会社
半導体集積回路装置
1か月前
大阪瓦斯株式会社
二次圧制御機構
27日前
日立建機株式会社
自律走行システム
24日前
株式会社デンソー
移動体制御装置
17日前
横河電機株式会社
電圧電流変換回路
2か月前
株式会社デンソー
車両用電子制御装置
1か月前
ニチコン株式会社
電源装置
2か月前
エンゼルグループ株式会社
無人搬送システム
1か月前
株式会社ダイフク
搬送設備の検査装置
27日前
シンフォニアテクノロジー株式会社
共振抑制制御装置
2か月前
シンフォニアテクノロジー株式会社
共振抑制制御装置
2か月前
株式会社FUJI
工作機械
2か月前
株式会社FUJI
工作機械
2か月前
株式会社オカムラ
自律移動ロボット
1か月前
三菱電機株式会社
運転支援システムおよび運転支援方法
17日前
オークマ株式会社
制御装置
1か月前
川崎重工業株式会社
操作レバー装置、及びその組立方法
9日前
トヨタ自動車株式会社
適合システム及び適合方法
1か月前
トヨタ自動車株式会社
適合システム及び適合方法
1か月前
株式会社デンソー
アクセル装置
20日前
株式会社デンソー
シリーズ電源
2か月前
株式会社ディスコ
加工装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ