TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024070048
公報種別
公開特許公報(A)
公開日
2024-05-22
出願番号
2022180403
出願日
2022-11-10
発明の名称
モータ制御装置
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
H02P
6/17 20160101AFI20240515BHJP(電力の発電,変換,配電)
要約
【課題】モータ回転速度の認識誤差を低減できるモータ制御装置を提供すること。
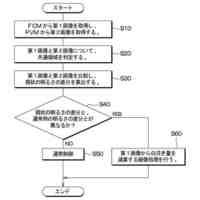
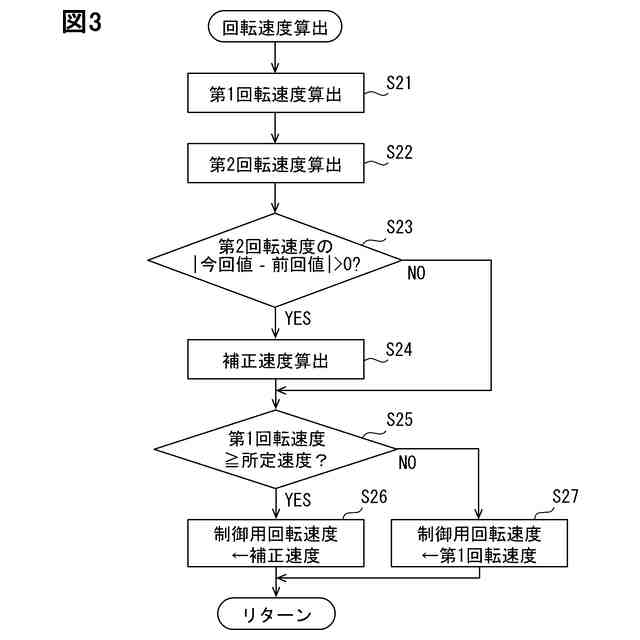
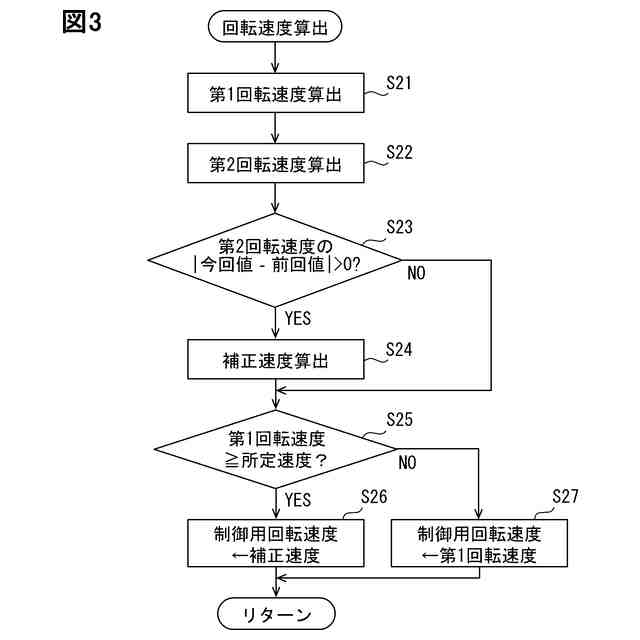
【解決手段】マイコンは、電気角360°時間を用いて第1回転速度を算出するとともに、電気角1800°時間を用いて第2回転速度を算出する(S21,S22)。マイコンは、第1回転速度と第2回転速度との速度差に相関する補正値を算出する(S24)。マイコンは、低回転時は制御用回転速度として第1回転速度を設定し、中高回転時は第2回転速度に補正値を加算した補正速度を設定する(S26,27)。
【選択図】図3
特許請求の範囲
【請求項1】
プロセッサ(11)が実行する工程であり、
モータの出力軸の回転に応じて所定の電気角毎にエッジが出力されるセンサ信号を回転センサから取得する取得工程(S10)と、
前記センサ信号の前記エッジに基づいて第1電気角ごとの時間的間隔である第1電気角時間を計時するとともに、前記第1電気角時間を用いてモータ回転速度を算出する第1算出工程(S21)と、
前記センサ信号の前記エッジに基づいて前記第1電気角よりも大きな第2電気角ごとの時間的間隔である第2電気角時間を計時するとともに、前記第2電気角時間を用いてモータ回転速度を算出する第2算出工程(S22)と、
前記第1算出工程で算出したモータ回転速度である第1回転速度と、前記第2算出工程で算出したモータ回転速度である第2回転速度との速度差に相関する補正値を算出する補正値算出工程(S24)と、
前記第1回転速度が速度閾値以上であるか否かを判定する速度判定工程(S25)と、
前記第1回転速度が所定の回転速度以上でないと判定すると、前記モータを制御する際に用いる制御用回転速度として前記第1回転速度を設定する第1設定工程(S27)と、
前記第1回転速度が所定の回転速度以上であると判定すると、前記制御用回転速度として前記第2回転速度に前記補正値を加算した補正速度を設定する第2設定工程(S26)と、を備えているモータ制御装置。
続きを表示(約 250 文字)
【請求項2】
前記補正値算出工程では、前記速度差を複数回にわたって保存しておき、複数の前記速度差の平均値を前記補正値として算出する、請求項1に記載のモータ制御装置。
【請求項3】
前記第1電気角は電気角360度であり、前記第2電気角は電気角1800度である、請求項1または2に記載のモータ制御装置。
【請求項4】
前記補正値算出工程では、前記第2回転速度の前回値と今回値とが異なる場合に限って、前記補正値を算出する、請求項1または2に記載のモータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、モータ制御装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1には、モータ制御装置の一例が開示されている。モータ制御装置は、回転するロータの磁界に応じてホールセンサから出力された信号を用いて、モータの起動時には電気角60度毎に出現するエッジ間の時間からロータの回転速度を算出する。そして、モータ制御装置は、ロータの回転速度が大きくなるに従って、電気角180度、電気角360度、電気角900度および電気角1800度毎に出現するエッジ間の時間からロータの回転速度を算出する。これにより、モータ制御装置は、低速域および高速域で回転速度を正確に算出でき、その結果、低速域から高速域までモータの円滑な回転制御が可能になる。
【先行技術文献】
【特許文献】
【0003】
特開2016-46886号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、モータ制御装置では、ロータの回転速度を算出するための電気角を電気角360度の倍数にならない電気角900度などに切り替えることがある。この場合、モータ制御装置では、着磁ばらつきの影響を受けやすく、回転速度の認識誤差が大きくなる可能性がある。上述の観点において、または言及されていない他の観点において、モータ制御装置にはさらなる改良が求められている。
【0005】
開示される一つの目的は、モータ回転速度の認識誤差を低減できるモータ制御装置を提供することである。
【課題を解決するための手段】
【0006】
ここに開示されたモータ制御装置は、
プロセッサ(11)が実行する工程であり、
モータの出力軸の回転に応じて所定の電気角毎にエッジが出力されるセンサ信号を回転センサから取得する取得工程(S10)と
センサ信号のエッジに基づいて第1電気角ごとの時間的間隔である第1電気角時間を計時するとともに、第1電気角時間を用いてモータ回転速度を算出する第1算出工程(S21)と、
センサ信号のエッジに基づいて第1電気角よりも大きな第2電気角ごとの時間的間隔である第2電気角時間を計時するとともに、第2電気角時間を用いてモータ回転速度を算出する第2算出工程(S22)と、
第1算出工程で算出したモータ回転速度である第1回転速度と、第2算出工程で算出したモータ回転速度である第2回転速度との速度差に相関する補正値を算出する補正値算出工程(S24)と、
第1回転速度が速度閾値以上であるか否かを判定する速度判定工程(S25)と、
第1回転速度が所定の回転速度以上でないと判定すると、モータを制御する際に用いる制御用回転速度として第1回転速度を設定する第1設定工程(S27)と、
第1回転速度が所定の回転速度以上であると判定すると、制御用回転速度として第2回転速度に補正値を加算した補正速度を設定する第2設定工程(S26)と、を備えていることを特徴とする。
【0007】
このように、モータ制御装置は、第1回転速度が速度閾値以上であるか否かによって、制御用回転速度を第1回転速度と補正速度とで切り替える。この補正速度は、第2回転速度に対して、速度差に相関する補正値を加算したものである。よって、第1回転速度と補正速度との差異は、第1回転速度と第2回転速度との差異よりも小さい。このため、モータ制御装置は、制御用回転速度を第1回転速度と補正速度とで切り替える構成において、制御用回転速度として第2回転速度を用いる場合よりも、プロセッサによるモータ回転速度の認識誤差を低減できる。
【0008】
この明細書において開示された複数の態様は、それぞれの目的を達成するために、互いに異なる技術的手段を採用する。請求の範囲およびこの項に記載した括弧内の符号は、後述する実施形態の部分との対応関係を例示的に示すものであって、技術的範囲を限定することを意図するものではない。この明細書に開示される目的、特徴、および効果は、後続の詳細な説明、および添付の図面を参照することによってより明確になる。
【図面の簡単な説明】
【0009】
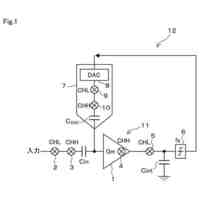
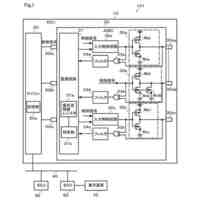
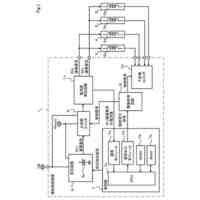
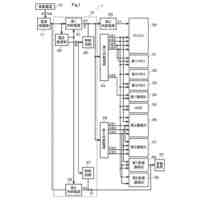
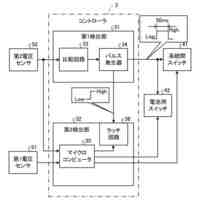
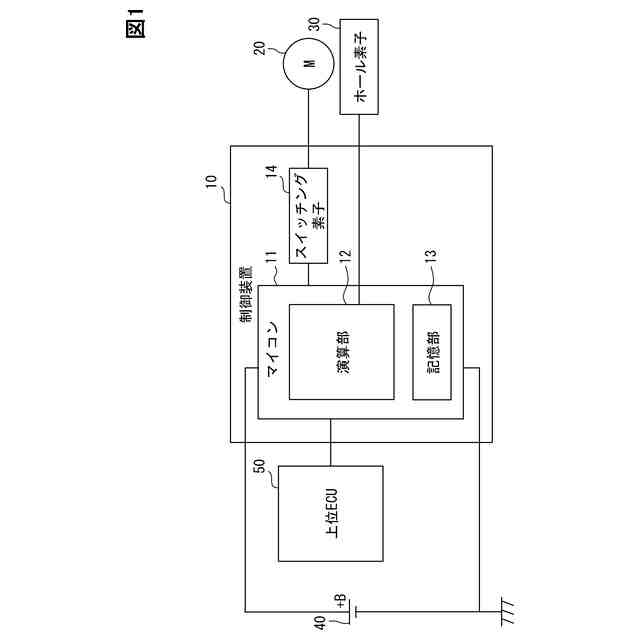
モータ制御装置の概略構成を示すブロック図である。
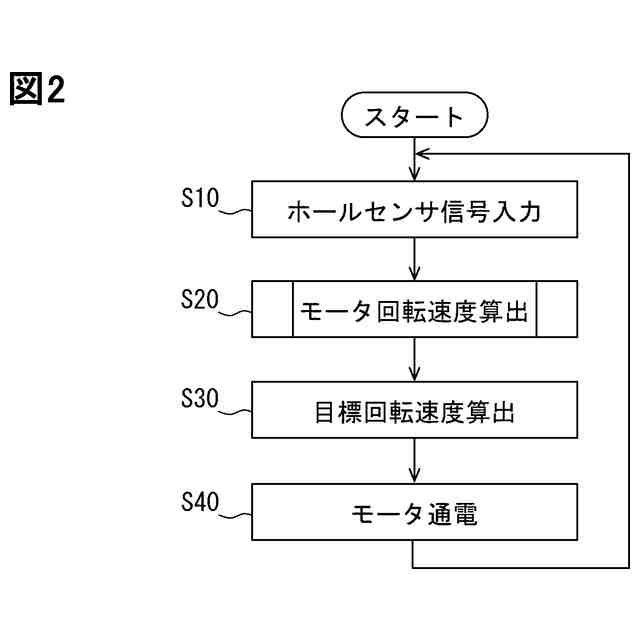
モータ制御装置の処理動作を示すフローチャートである。
モータ回転速度の算出処理を示すフローチャートである。
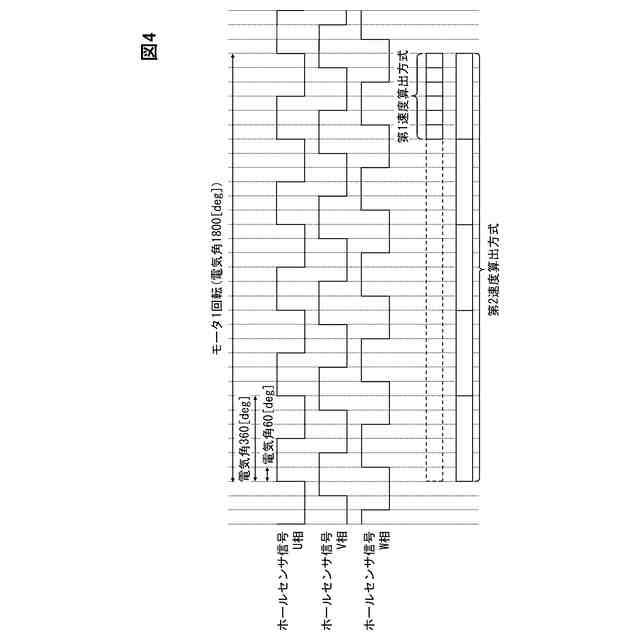
ホールセンサ信号と算出方式の関係を示す図面である。
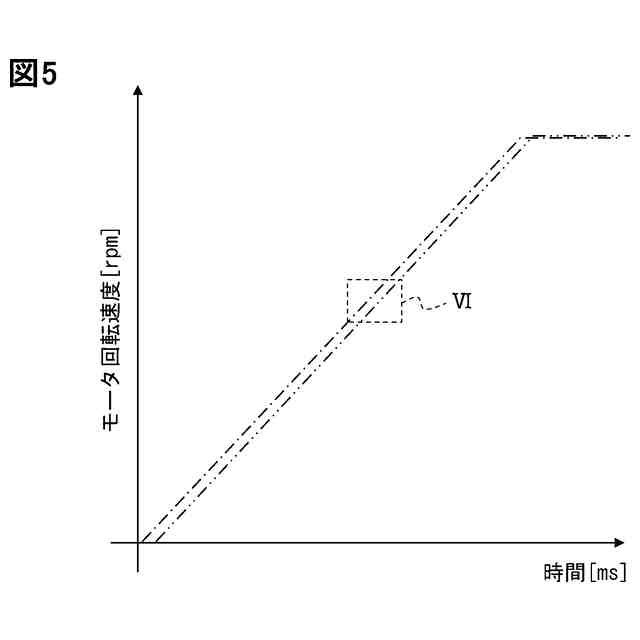
算出方式毎のモータ回転速度を示す図面である。
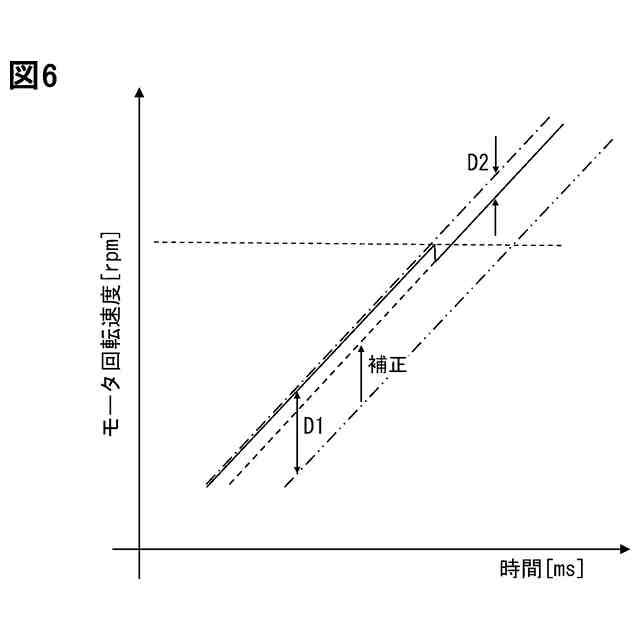
図5のVI部分の拡大図である。
異なる算出方式によるモータ回転速度の差異を示す図面である。
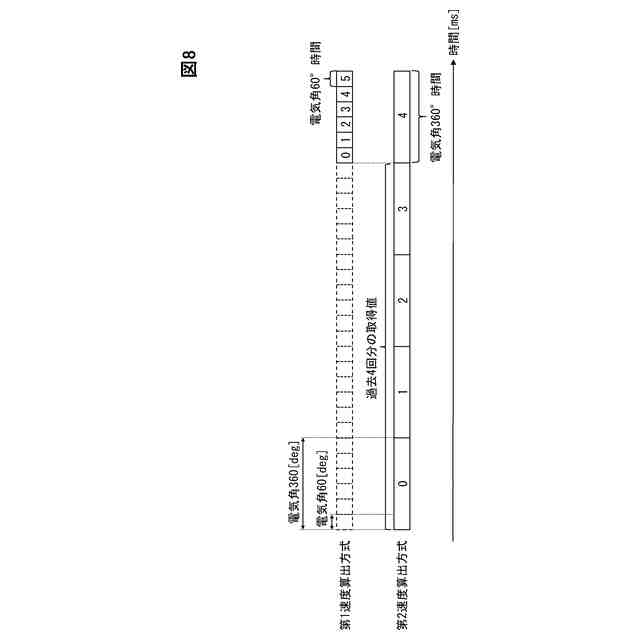
第1速度算出方式と第2速度算出方式の関係を示す図面である。
【発明を実施するための形態】
【0010】
図1~図7を用いて、モータ制御装置10に関して説明する。モータ制御装置10は、モータ20、ホール素子30、バッテリ40、上位ECU50と接続されている。モータ制御装置10は、たとえば、車両に搭載可能に構成されている。モータ制御装置10は、車両に搭載されたモータ20を駆動制御する。なお、図面では、モータ制御装置10を制御装置と略称で示している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
送風機
11日前
株式会社デンソーエレクトロニクス
継電器
4日前
株式会社デンソー
変調器
23日前
株式会社デンソー
回転電機
3日前
株式会社デンソー
表示装置
24日前
株式会社デンソー
回転電機
3日前
株式会社デンソー
回転電機
3日前
株式会社デンソー
回転電機
3日前
株式会社デンソー
回転電機
3日前
株式会社デンソー
回転電機
3日前
株式会社デンソー
回転電機
3日前
株式会社デンソー
空調装置
16日前
株式会社デンソー
撮像装置
16日前
株式会社デンソー
表示装置
9日前
株式会社デンソー
回転電機
3日前
株式会社デンソー
光学センサ
13日前
株式会社デンソー
位相シフタ
11日前
株式会社デンソー
半導体装置
23日前
株式会社デンソー
半導体装置
17日前
株式会社デンソー
光測距装置
13日前
株式会社デンソー
基準電流源
19日前
株式会社デンソー
電流センサ
24日前
株式会社デンソー
噴射制御装置
13日前
株式会社デンソー
電子制御装置
3日前
株式会社デンソーエレクトロニクス
ヒューズ装置
9日前
株式会社デンソー
燃料噴射装置
16日前
株式会社デンソー
音声取得装置
2日前
株式会社デンソー
電力変換装置
11日前
株式会社デンソー
電源監視回路
23日前
株式会社デンソー
電子制御装置
5日前
株式会社デンソー
A/D変換器
23日前
株式会社デンソー
基準電源回路
19日前
株式会社デンソーテン
電源制御装置
23日前
株式会社デンソー
電力変換装置
3日前
株式会社デンソー
耐電圧検査装置
17日前
株式会社デンソー
車両用空調装置
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ