TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024068508
公報種別
公開特許公報(A)
公開日
2024-05-20
出願番号
2022179024
出願日
2022-11-08
発明の名称
位置決定装置
出願人
株式会社Hemisphere Japan
代理人
フェリシテ弁理士法人
主分類
E02F
9/20 20060101AFI20240513BHJP(水工;基礎;土砂の移送)
要約
【課題】 作業機に備えられた車両位置測定装置の位置に対する較正を、容易且つ精度良く実施する。
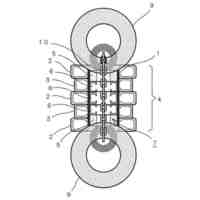
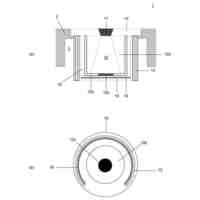
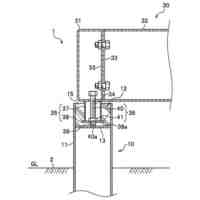
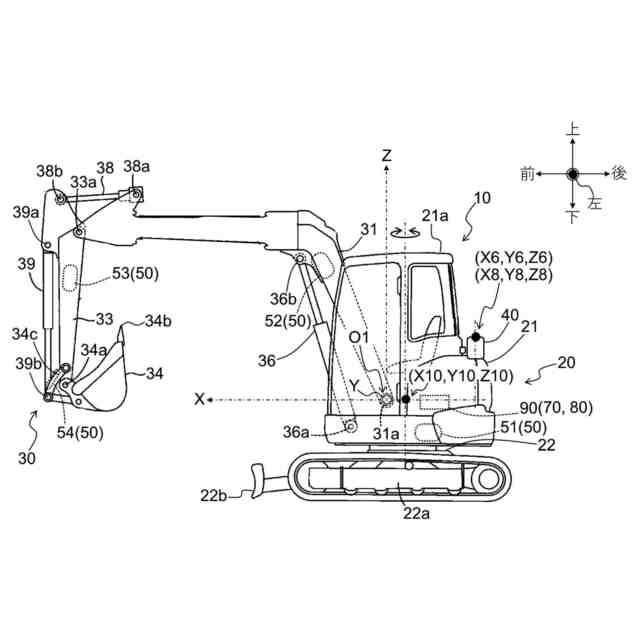
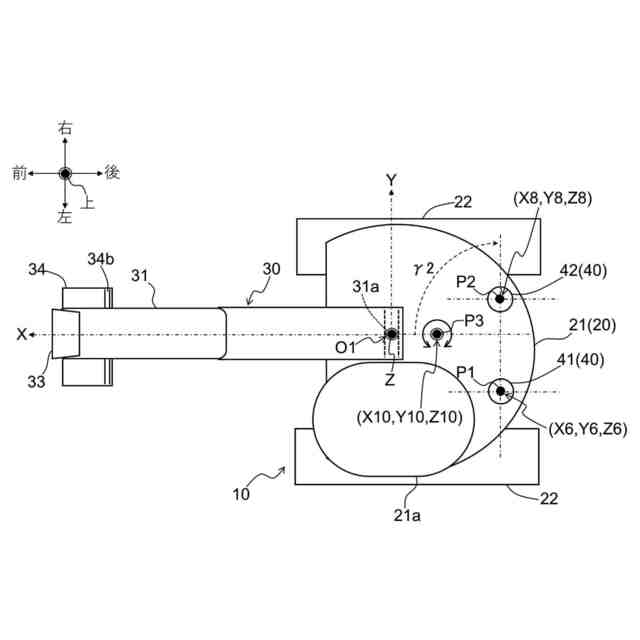
【解決手段】 バックホー10に適用される位置決定装置80によれば、3Dキャリブレーションのための、プライマリアンテナ位置決定部81が備えられている。プライマリアンテナ位置決定部81は、プライマリアンテナ41の位置として、車両座標系におけるプライマリアンテナ41上の中心点P1に対応する第6座標(X6,Y6,Z6)を決定するようになっている。プライマリアンテナ位置決定部81では、第1原点O1、第1座標(X1,Y2,Z3)、ピッチ角θ2、第2座標(S2,T2,U2)、第3座標(S3,T3,U3)、第4座標(S4,T4,U4)、第5座標(S5,T5,U5)、及び、第1方位角γ1に基づいて、第6座標(X6,Y6,Z6)が決定される。
【選択図】 図2
特許請求の範囲
【請求項1】
走行車両と、
前記走行車両と接続部位を介して接続され、前記接続部位から離間する先端部位に向かう方向に沿って延びる可動操作具であって、前記接続部位を中心として前記走行車両に対して相対回転可能な可動操作具と、
前記走行車両の所定部位に搭載され、前記搭載された位置を測定する第1車両位置測定装置と、
前記走行車両の回転度合いを取得する車両回転度取得装置と、
前記可動操作具の回転度合いを取得する可動操作具回転度取得装置と、
を備え、
少なくとも、前記第1車両位置測定装置、前記車両回転度取得装置、及び、前記可動操作具回転度取得装置のそれぞれにより、測定・取得された前記第1車両位置測定装置の位置、前記走行車両の回転度合い、及び、前記可動操作具の回転度合いに基づいて、前記可動操作具の先端部位の位置が決定されるように構成された
作業機であって、
水平面に沿って前記接続部位から前記先端部位に向かう方向である第1方向と、
前記第1方向と直交し、且つ、前記走行車両の車幅方向に対応するとともに、前記水平面に沿って前記接続部位を通る第2方向と、
前記第1方向及び前記第2方向のそれぞれと直交し、且つ、鉛直方向に沿って前記接続部位を通る第3方向と、
前記接続部位を第1原点とし、前記第1方向、前記第2方向、及び、前記第3方向にて構成される3次元の車両座標系と、
が規定され、
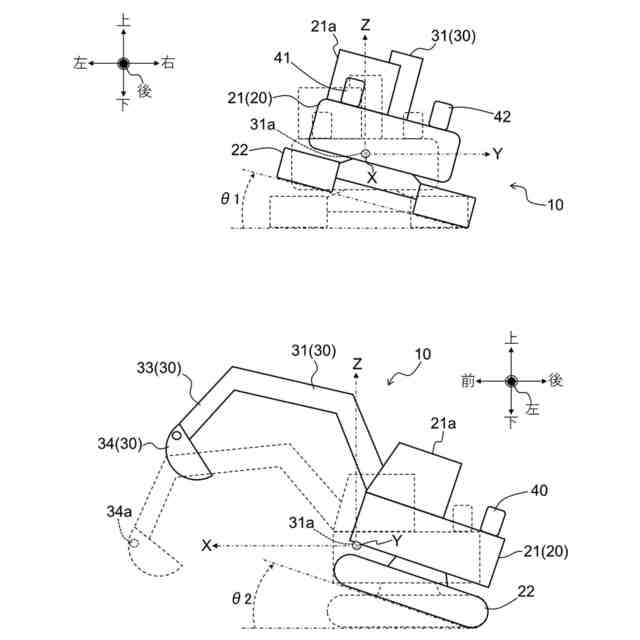
前記車両座標系において、前記車両回転度取得装置により取得される前記走行車両の前記第1方向を軸とした回転度合いを示すロール角がゼロとなる状態であるロール角ゼロ状態を達成可能に構成された
作業機に適用される位置決定装置において、
前記車両座標系における、前記ロール角ゼロ状態での前記第1原点と、
前記車両座標系における、前記ロール角ゼロ状態での、前記可動操作具上の所定の点に対応する第1座標と、
前記車両座標系における、前記ロール角ゼロ状態での、前記車両回転度取得装置により取得される前記走行車両の前記第2方向を軸とした回転度合いを示すピッチ角と、
任意の点を第2原点とし、水平面に沿って前記第2原点を通る第4方向、前記第4方向と直交し、且つ、前記水平面に沿って前記第2原点を通る第5方向、及び、前記第4方向及び前記第5方向のそれぞれと直交し、且つ、鉛直方向に沿って前記第2原点を通る第6方向にて構成される3次元の測定座標系における、前記ロール角ゼロ状態での、前記可動操作具上の所定の点に対応する第2座標と、
前記測定座標系における、前記ロール角ゼロ状態での、前記可動操作具上の所定の点に対応する座標であって、前記第2座標の位置と異なる第3座標と、
前記測定座標系における、前記ロール角ゼロ状態での、前記第1座標に対応する前記可動操作具上の所定の点に対応する第4座標と、
前記測定座標系における、前記ロール角ゼロ状態での、前記第1車両位置測定装置上の所定の点に対応する第5座標と、
前記測定座標系における、前記ロール角ゼロ状態での、前記第2座標及び前記第3座標に基づき取得される前記水平面上の前記第4方向に対する成す角である第1方位角と、
に基づいて、
前記第1車両位置測定装置の位置として、前記車両座標系における前記第1車両位置測定装置上の所定の点に対応する第6座標を決定する第1車両位置測定装置位置決定部
を備えた
位置決定装置。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の位置決定装置において、
前記作業機は、更に、
前記走行車両において、前記第1車両位置測定装置の位置とは異なる所定部位に搭載され、前記搭載された位置を測定する第2車両位置測定装置を備え、
第1車両位置測定装置位置決定部に加え、更に、
前記決定された前記第6座標と、
前記測定座標系における、前記ロール角ゼロ状態での、前記第5座標、及び、前記第2車両位置測定装置上の所定の点に対応する第7座標に基づき取得される前記水平面上の前記第4方向に対する成す角である第2方位角と、
に基づいて、
前記第2車両位置測定装置の位置として、前記車両座標系における前記第2車両位置測定装置上の所定の点に対応する第8座標を決定する第2車両位置測定装置位置決定部
を備えた
位置決定装置。
【請求項3】
請求項2に記載の位置決定装置において、
前記作業機はバックホーであり、
前記可動操作具は、
前記第1方向において一端側及び他端側が規定されたブームであって、前記接続部位としてのブームピンを介して前記一端側が前記走行車両と接続され、前記第2方向と平行な前記ブームピンを通る軸を中心に回転可能なブームと、
前記第1方向において一端側及び他端側が規定されたアームであって、前記一端側が前記ブームの他端側と接続されるアームと、
前記第1方向において一端側及び他端側が規定されたバケットであって、バケットピンを介して前記一端側が前記アームの他端側と接続され、前記他端側が前記先端部位として構成されて、前記第2方向と平行な前記バケットピンを通る軸を中心に回転可能なバケットと、
を備え、
前記第1車両位置測定装置位置決定部は、
前記第1原点として、
前記車両座標系における、前記ロール角ゼロ状態での前記ブームピン上の点を用い、
前記第1座標として、
前記車両座標系における、前記ロール角ゼロ状態での前記バケットピン上の点を用い、
前記第2座標として、
前記測定座標系における、前記ロール角ゼロ状態での前記ブーム上の点を用い、
前記第3座標として、
前記測定座標系における、前記ロール角ゼロ状態での前記バケットの前記先端部位の点を用い、
前記第4座標として、
前記測定座標系における、前記ロール角ゼロ状態での前記バケットピン上の点を用いるように構成された
位置決定装置。
【請求項4】
請求項3に記載の位置決定装置において、
前記走行車両は、
所定の軸を中心に前記可動操作具と一体的に旋回可能に構成され、
前記第1原点と、
前記第1座標と、
前記第2座標と、
前記第3座標と、
前記第4座標と、
前記ピッチ角と、
前記第1方位角と、
前記測定座標系における、前記ロール角ゼロ状態での前記走行車両の旋回にて描かれる前記可動操作具上の所定の点の円弧軌跡上の第9座標と、
に基づいて、
前記走行車両の旋回中心の位置として、前記車両座標系における前記走行車両の旋回中心の点に対応する第10座標を決定する車両旋回中心位置決定部
を備えた
位置決定装置。
【請求項5】
請求項4に記載の位置決定装置において、
前記測定座標系における前記第2座標、前記第3座標、前記第4座標、前記第5座標、前記第7座標、及び、前記第9座標のうち、少なくとも1つ又は2つ以上が、前記作業機から離間して設置された外部座標測定装置を用いて測定される
位置決定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、少なくとも可動操作具を備えた作業機であって、可動操作具の先端部位の位置を決定するように構成された作業機に適用され、作業機における所定部位の位置を決定する位置決定装置に関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
従来、建設機械等の作業機として、バックホーが知られている。バックホーは、一般に、ブーム、アーム、バケット等の可動操作具を備えている。この可動操作具は、運転者の操作等に応じて、作動制御される。特に、可動操作具の先端部位は、地表面の狙いの位置にて掘削するために、位置を取得することが好ましい。例えば、取得された先端部位の位置を用いて、運転者に対し、可動操作具の操作をナビゲートすることができる。このような事情を鑑みて、近年、可動操作具の先端部位の位置を決定するための技術が、開発されてきている。
【0003】
特許文献1では、作業機としてのバックホーの刃先位置を決定する技術が、開示されている。バックホーの刃先位置を決定するために、少なくとも車体の位置情報が用いられる。車体位置を検出するために、バックホーに、GNSS用のアンテナが搭載されている。搭載されたアンテナの位置が、外部計測装置を用いて計測されて、アンテナパラメータが取得される。そして、アンテナパラメータは、較正値としてバケットの刃先位置の演算に用いられるようになっている。
【先行技術文献】
【特許文献】
【0004】
特許第5237408号公報(段落0063、0079等)
【発明の概要】
【0005】
上記特許文献1では、アンテナパラメータとして、車両座標系におけるブームピンと、アンテナとの間の距離が、演算される。当該距離は、3次元の各方向においてそれぞれ演算されることで、座標を構成する。他方、ブームピンの位置は、車体の3次元的な傾斜に伴って、種々変動する。係る観点を演算に十分に反映しなければ、アンテナパラメータも変動し、較正の精度を期待することが困難となる。上記特許文献1では、アンテナパラメータについて、具体的な演算プロセスも開示されていない。このため、アンテナの位置に対する較正を、容易且つ精度良く実施するにあたり、改善の余地があると言える。
【0006】
そこで、本発明は、上記を鑑み、少なくとも可動操作具、及び、車両位置測定装置を備えた作業機であって、可動操作具の先端部位の位置を、車両位置に基づき決定するように構成された作業機に適用され、作業機における所定部位の位置を決定する位置決定装置において、車両位置測定装置の位置に対する較正を、容易且つ精度良く実施できるものを提供することにある。
【課題を解決するための手段】
【0007】
この技術的課題を解決するための本発明の技術的手段は、以下に示す点を特徴とする。本発明の位置決定装置は、走行車両と、前記走行車両と接続部位を介して接続され、前記接続部位から離間する先端部位に向かう方向に沿って延びる可動操作具であって、前記接続部位を中心として前記走行車両に対して相対回転可能な可動操作具と、前記走行車両の所定部位に搭載され、前記搭載された位置を測定する第1車両位置測定装置と、前記走行車両の回転度合いを取得する車両回転度取得装置と、前記可動操作具の回転度合いを取得
する可動操作具回転度取得装置と、を備え、少なくとも、前記第1車両位置測定装置、前記車両回転度取得装置、及び、前記可動操作具回転度取得装置のそれぞれにより、測定・取得された前記第1車両位置測定装置の位置、前記走行車両の回転度合い、及び、前記可動操作具の回転度合いに基づいて、前記可動操作具の先端部位の位置が決定されるように構成された作業機であって、水平面に沿って前記接続部位から前記先端部位に向かう方向である第1方向と、前記第1方向と直交し、且つ、前記走行車両の車幅方向に対応するとともに、前記水平面に沿って前記接続部位を通る第2方向と、前記第1方向及び前記第2方向のそれぞれと直交し、且つ、鉛直方向に沿って前記接続部位を通る第3方向と、前記接続部位を第1原点とし、前記第1方向、前記第2方向、及び、前記第3方向にて構成される3次元の車両座標系と、が規定され、前記車両座標系において、前記車両回転度取得装置により取得される前記走行車両の前記第1方向を軸とした回転度合いを示すロール角がゼロとなる状態であるロール角ゼロ状態を達成可能に構成された作業機に適用される。
【0008】
本発明の位置決定装置は、前記車両座標系における、前記ロール角ゼロ状態での前記第1原点と、前記車両座標系における、前記ロール角ゼロ状態での、前記可動操作具上の所定の点に対応する第1座標と、前記車両座標系における、前記ロール角ゼロ状態での、前記車両回転度取得装置により取得される前記走行車両の前記第2方向を軸とした回転度合いを示すピッチ角と、任意の点を第2原点とし、水平面に沿って前記第2原点を通る第4方向、前記第4方向と直交し、且つ、前記水平面に沿って前記第2原点を通る第5方向、及び、前記第4方向及び前記第5方向のそれぞれと直交し、且つ、鉛直方向に沿って前記第2原点を通る第6方向にて構成される3次元の測定座標系における、前記ロール角ゼロ状態での、前記可動操作具上の所定の点に対応する第2座標と、前記測定座標系における、前記ロール角ゼロ状態での、前記可動操作具上の所定の点に対応する座標であって、前記第2座標の位置と異なる第3座標と、前記測定座標系における、前記ロール角ゼロ状態での、前記第1座標に対応する前記可動操作具上の所定の点に対応する第4座標と、前記測定座標系における、前記ロール角ゼロ状態での、前記第1車両位置測定装置上の所定の点に対応する第5座標と、前記測定座標系における、前記ロール角ゼロ状態での、前記第2座標及び前記第3座標に基づき取得される前記水平面上の前記第4方向に対する成す角である第1方位角と、に基づいて、前記第1車両位置測定装置の位置として、前記車両座標系における前記第1車両位置測定装置上の所定の点に対応する第6座標を決定する第1車両位置測定装置位置決定部を備える。
【0009】
本発明の位置決定装置において、前記作業機は、更に、前記走行車両において、前記第1車両位置測定装置の位置とは異なる所定部位に搭載され、前記搭載された位置を測定する第2車両位置測定装置を備え、第1車両位置測定装置位置決定部に加え、更に、前記決定された前記第6座標と、前記測定座標系における、前記ロール角ゼロ状態での、前記第5座標、及び、前記第2車両位置測定装置上の所定の点に対応する第7座標に基づき取得される前記水平面上の前記第4方向に対する成す角である第2方位角と、に基づいて、前記第2車両位置測定装置の位置として、前記車両座標系における前記第2車両位置測定装置上の所定の点に対応する第8座標を決定する第2車両位置測定装置位置決定部が備えられる。
【0010】
本発明の位置決定装置において、前記作業機はバックホーであり、前記可動操作具は、前記第1方向において一端側及び他端側が規定されたブームであって、前記接続部位としてのブームピンを介して前記一端側が前記走行車両と接続され、前記第2方向と平行な前記ブームピンを通る軸を中心に回転可能なブームと、前記第1方向において一端側及び他端側が規定されたアームであって、前記一端側が前記ブームの他端側と接続されるアームと、前記第1方向において一端側及び他端側が規定されたバケットであって、バケットピンを介して前記一端側が前記アームの他端側と接続され、前記他端側が前記先端部位として構成されて、前記第2方向と平行な前記バケットピンを通る軸を中心に回転可能なバケ
ットと、を備え、前記第1車両位置測定装置位置決定部は、前記第1原点として、前記車両座標系における、前記ロール角ゼロ状態での前記ブームピン上の点を用い、前記第1座標として、前記車両座標系における、前記ロール角ゼロ状態での前記バケットピン上の点を用い、前記第2座標として、前記測定座標系における、前記ロール角ゼロ状態での前記ブーム上の点を用い、前記第3座標として、前記測定座標系における、前記ロール角ゼロ状態での前記バケットの前記先端部位の点を用い、前記第4座標として、前記測定座標系における、前記ロール角ゼロ状態での前記バケットピン上の点を用いるように構成される。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
不同沈下の修正工法
1か月前
株式会社刃
掘削攪拌装置
18日前
日本ソリッド株式会社
衝撃吸収体
3日前
UBEマシナリー株式会社
除塵機
27日前
松井建材有限会社
残存型枠
1か月前
株式会社メーサイ
地質調査装置
1か月前
五洋建設株式会社
改質土
24日前
住友建機株式会社
作業機械
1か月前
株式会社 林物産発明研究所
マンホール蓋
18日前
株式会社横山基礎工事
飛散防止装置
1か月前
日立建機株式会社
作業機械
4日前
株式会社サンエー
螺旋杭操作具
1か月前
戸田建設株式会社
水底堆積土砂の吸引装置
26日前
ナカダ産業株式会社
支柱構造体の施工方法
26日前
株式会社進富
杭基礎構造
17日前
日本製鉄株式会社
堤防
6日前
ヤンマーホールディングス株式会社
作業機械
17日前
鹿島建設株式会社
橋脚および地下構造物の構築方法
25日前
株式会社ワイビーエム
建設機械の施工管理装置
20日前
特殊梯子製作所有限会社
作業用梯子の吊下設置構造物
13日前
株式会社大林組
現地発生材カウンタウェイト式建設機械
27日前
住友重機械工業株式会社
ショベル支援装置及びショベル
24日前
株式会社竹中工務店
基礎構造
20日前
住友重機械工業株式会社
作業機械の制御システム
27日前
青木あすなろ建設株式会社
農業用水管の施工方法
20日前
住友重機械工業株式会社
作業機械及び情報処理装置
26日前
JFE建材株式会社
土留パネル
11日前
住友重機械工業株式会社
作業機械及び作業機械支援システム
20日前
株式会社Die Kraft
ショベル系掘削機活用型作業機
1か月前
住友重機械工業株式会社
ショベル遠隔操作装置及びショベル
24日前
住友重機械工業株式会社
ショベルの遠隔制御システム
1か月前
株式会社大林組
亀裂を補修する方法
27日前
飛島建設株式会社
軟弱地盤の補強装置及びその補強方法
26日前
パナソニックホームズ株式会社
外構構造体
6日前
株式会社竹中工務店
建物の基礎構造
5日前
日鉄建材株式会社
回転杭の施工方法
16日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ