TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024068450
公報種別
公開特許公報(A)
公開日
2024-05-20
出願番号
2022178913
出願日
2022-11-08
発明の名称
パラレルリンク機構の設計支援装置
出願人
日本精工株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G06F
30/10 20200101AFI20240513BHJP(計算;計数)
要約
【課題】設計者の負担を軽減できるパラレルリンク機構の設計支援装置を提供する。
【解決手段】パラレルリンク機構の設計支援装置であって、組み合わせ角度とツールの初期姿勢の角度を代入した第1次逆運動学方程式の判別式によりパラレルリンク機構の成立要件を満たすかを判定する。成立要件を満たすと判定した組み合わせ角度を第1次組み合わせ角度と認定する。第1次組み合わせ角度とツールの可動域から選択された選択姿勢角度を選択し、第2次逆運動学方程式に代入する。第2次逆運動学方程式の判別式によりパラレルリンク機構の成立要件を満たすかを判定する第2次絞り込み判定する。第2次絞り込み判定後、他の選択姿勢角度を選択し第2次絞り込み判定を繰り返し行う。ツールの姿勢角度の可動域における全てのツールの姿勢角度で成立要件を満たすと判定した第1次組み合わせ角度を第2次組み合わせ角度と認定する。
【選択図】図18
特許請求の範囲
【請求項1】
ツールの中心線上にある回転中心を中心に姿勢変換を行うパラレルリンク機構において、要求される前記ツールの姿勢角度の可動域を満たす設計変数を絞り込むパラレルリンク機構の設計支援装置であって、
前記パラレルリンク機構は、
固定ベースと、
前記ツールを支持するエンドエフェクタベースと、
前記固定ベースと前記エンドエフェクタベースとを連結する複数のリンク機構と、
を備え、
前記リンク機構は、
前記固定ベースに回転自在に連結する基部側ジョイントと、
一端が前記基部側ジョイントと連結する基部側リンクと、
前記基部側リンクの他端に設けられた中間ジョイントと、
前記中間ジョイントを介して一端が前記基部側リンクと回転自在に連結する先端側リンクと、
前記先端側リンクの他端と前記エンドエフェクタベースとを回転自在に連結する先端側ジョイントと、
を有し、
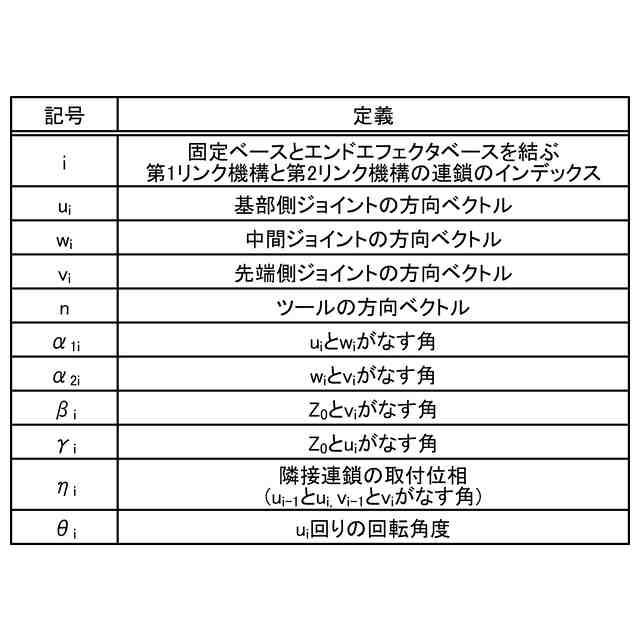
絞り込まれる前記設計変数は、
前記基部側ジョイントと前記中間ジョイントとがなす第1角度と、
前記中間ジョイントと前記先端側ジョイントとがなす第2角度と、
前記回転中心から前記固定ベースに引いた垂線である基準線と前記先端側ジョイントとがなす第3角度と、
前記基準線と前記基部側ジョイントとがなす第4角度と、
であり、
要求される前記ツールの姿勢角度の可動域と、
前記第1角度、前記第2角度、前記第3角度、及び前記第4角度のそれぞれが設定可能な所定の角度と、
を記憶し、
前記所定の角度から選択された前記第1角度、前記第2角度、前記第3角度、及び前記第4角度をそれぞれ含む組み合わせ角度であって、前記第1角度、前記第2角度、前記第3角度、及び前記第4角度のうち少なくとも1つが異なる複数の前記組み合わせ角度を準備し、
準備した複数の前記組み合わせ角度から1つの前記組み合わせ角度を選択し、
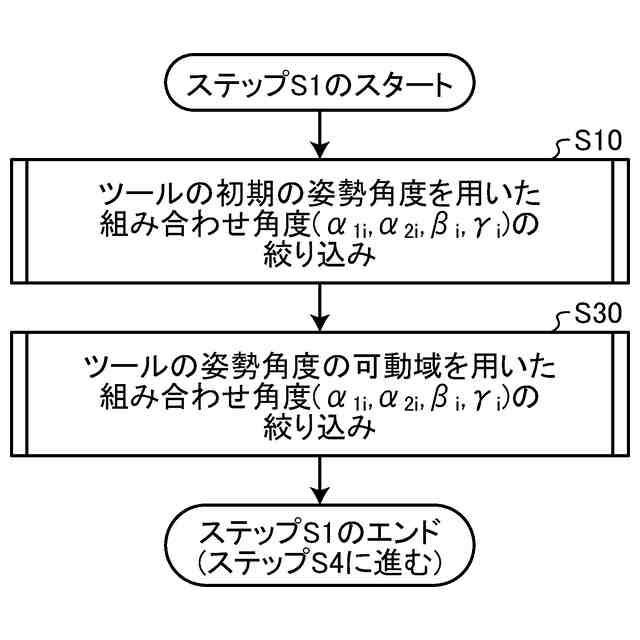
選択した前記組み合わせ角度と、前記ツールの初期姿勢の角度と、を第1次逆運動学方程式に代入し、
前記第1次逆運動学方程式の判別式により前記パラレルリンク機構の成立要件を満たすかを判定する第1次絞り込み判定し、
前記成立要件を満たすと判定した前記組み合わせ角度を第1次組み合わせ角度と認定し、
第1次絞り込み判定した後、改めて複数の前記組み合わせ角度から他の前記組み合わせ角度を選択し第1次絞り込み判定することを繰り返し行うことで、複数の前記組み合わせ角度を、複数の前記第1次組み合わせ角度に絞り込み、
複数の前記第1次組み合わせ角度から1つの前記第1次組み合わせ角度を選択し、
前記ツールの可動域から選択された選択姿勢角度を選択し、
選択した前記第1次組み合わせ角度と、前記選択姿勢角度と、を第2次逆運動学方程式に代入し、
前記第2次逆運動学方程式の判別式により前記パラレルリンク機構の成立要件を満たすかを判定する第2次絞り込み判定し、
第2次絞り込み判定した後、選択した前記第1次組み合わせ角度をそのままとし、改めて前記ツールの姿勢角度の可動域から他の前記選択姿勢角度を選択し第2次絞り込み判定することを繰り返し行うことで、前記ツールの姿勢角度の可動域における全ての前記ツールの姿勢角度で前記成立要件を満たすと判定した前記第1次組み合わせ角度を第2次組み合わせ角度と認定し、
選択した1つの前記第1次組み合わせ角度の前記第2次絞り込み判定が終了した場合、改めて複数の前記第1次組み合わせ角度から他の前記第1次組み合わせ角度を選択し第2次絞り込み判定することを繰り返すことで、複数の前記第1次組み合わせ角度を、第2次組み合わせ角度に絞り込む
パラレルリンク機構の設計支援装置。
続きを表示(約 2,200 文字)
【請求項2】
前記ツールが初期姿勢の場合における前記第1次組み合わせ角度の第1ヤコビアンを算出し、
前記ツールが前記選択姿勢角度の場合における前記第2次組み合わせ角度の第2ヤコビアンを算出し、
前記第1ヤコビアンの符号関数と前記第2ヤコビアンの符号関数を算出し、
前記第2ヤコビアンの符号関数と前記第2ヤコビアンの符号関数とが等しいかを特異点判定し、
等しくない判定した前記第1次組み合わせ角度を前記第2次組み合わせ角度に認定しない
請求項1に記載のパラレルリンク機構の設計支援装置。
【請求項3】
前記パラレルリンク機構の回転中心が前記ツールの先端に配置された場合、前記組み合わせ角度に含まれる前記第3角度の範囲を90°から180°未満に絞り込み、前記第4角度の範囲を0°から90°未満に絞り込む
請求項2に記載のパラレルリンク機構の設計支援装置。
【請求項4】
前記パラレルリンク機構がいずれの姿勢であっても前記中間ジョイントが前記回転中心よりも前記固定ベースの反対側に移動しない場合、前記組み合わせ角度を代入した前記中間ジョイントのZ成分が前記回転中心より前記固定ベース寄りにあるかを判定し、
前記中間ジョイントのZ成分が前記回転中心より前記固定ベース寄りにないと判定した前記組み合わせ角度を前記第1次組み合わせ角度に認定しない
請求項3に記載のパラレルリンク機構の設計支援装置。
【請求項5】
寸法条件である、前記パラレルリンク機構の外径最大値と、前記パラレルリンク機構の高さ最大値と、前記ツールの長さと、を記憶し、
複数の前記第2次組み合わせ角度から1つの前記第2次組み合わせ角度を選択し、
選択した前記第2次組み合わせ角度に含まれる前記第3角度と、前記ツールの長さに基づいて、前記エンドエフェクタベースの大きさを算出し、
算出した前記エンドエフェクタベースの大きさが、前記パラレルリンク機構の外径最大値以下となっているかの第3次絞り込み判定を行い、
前記パラレルリンク機構の外径最大値以下と判定した前記第2次組み合わせ角度を第3次組み合わせ角度と認定し、
前記第3次組み合わせ角度に含まれる前記第4角度に基づいて、前記固定ベースの大きさを算出し、
算出された前記固定ベースの大きさが、要求される前記パラレルリンク機構の外径最大値以下となっているかの第4次絞り込み判定を行い、
算出された前記固定ベースの大きさが、前記パラレルリンク機構の外径最大値以下となっていると判定した前記第3次組み合わせ角度を第4次組み合わせ角度と認定し、
前記第3次絞り込み判定で、前記パラレルリンク機構の外径最大値を超えると判定した場合、及び前記第4次絞り込み判定が終了した場合、改めて複数の前記第2次組み合わせ角度から他の前記第2次組み合わせ角度を選択し第3次絞り込み判定することを繰り返し行うことで、複数の前記第2次組み合わせ角度から前記第4次組み合わせ角度に絞り込む
請求項1から請求項4のいずれか1項に記載のパラレルリンク機構の設計支援装置。
【請求項6】
絞り込まれる前記設計変数は、前記基部側リンクのうち、前記基部側リンクの中間部から前記基部側ジョイントと連結する部分までの第1延在部長さであり、
前記第1延在部長さの設定可能な所定の長さを記憶し、
前記所定の長さから前記第1延在部長さを1つ選択し、
複数の前記第4次組み合わせ角度から1つの前記第4次組み合わせ角度を選択し、
選択された前記第4次組み合わせ角度と、選択された前記第1延在部長さに基づいて、前記中間ジョイントが径方向外側に張り出す第1張り出し量を算出し、
前記第1張り出し量が前記外径最大値の半分の半径最大値未満となるかを第5次絞り込み判定し、
前記第1張り出し量が前記外径最大値の半分の半径最大値未満と判定した前記第1延在部長さを第1次第1延在部長さと認定し、
前記第1次第1延在部長さと前記第4次組み合わせ角度に基づいて、前記先端側ジョイントが径方向外側に最も張り出す第2張り出し量を算出し、
前記第2張り出し量が前記半径最大値未満となるかを第6次絞り込み判定し、
前記第2張り出し量が前記半径最大値未満となると判定した前記第1次第1延在部長さを第2次第1延在部長さと認定し、
前記第5次絞り込み判定で、前記第1張り出し量が前記外径最大値の半分の半径最大値以上と判定された場合、及び、前記第6次絞り込み判定が収容した場合、前記第4次組み合わせ角度をそのままにしつつ、前記第1延在部長さを他の長さに変更し前記第5次絞り込み判定し、かつ前記第6次絞り込み判定することを繰り返し行うことで、前記第4次組み合わせ角度に対応する前記第1延在部長さを前記所定の長さから第2次第1延在部長さに絞り、
1つの前記第4次組み合わせ角度に対応する前記第1延在部長さを絞り終えた場合、複数の前記第4次組み合わせ角度から他の前記第4次組み合わせ角度を選択し、選択した他の前記第4次組み合わせ角度に対応する第2次第1延在部長さを絞り込む
請求項5に記載のパラレルリンク機構の設計支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、パラレルリンク機構の設計支援装置。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
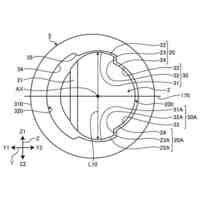
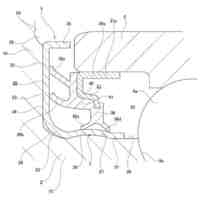
近年、医療機器や産業機器などの装置に、パラレルリンク機構が用いられることがある。下記特許文献に示すように、パラレルリンク機構は、固定ベースと、固定ベースから離隔するエンドエフェクタベースと、固定ベースとエンドエフェクタベースとを連結する複数のリンク機構と、を備える。エンドエフェクタベースには、ツールが取り付けられる。複数のリンク機構のうち少なくとも1つに動力が伝達されると、エンドエフェクタベースは任意の点を中心に傾き、ツールの姿勢が変わる。そして、ツールの先端は、任意の点を中心とする仮想球面上を移動する。また、任意の点がツールの先端に配置されたパラレルリンク機構が検討されている。これによれば、ツールの先端が移動しないで、ツールの姿勢のみが変更される。以下、ツールの姿勢を変えることを姿勢変換と称する場合がある。また、任意の点を回転中心と称する場合がある。
【先行技術文献】
【特許文献】
【0003】
特開2021-24061号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、パラレルリンク機構では、ツールの姿勢変換の可動域などの設計要求がある。そして、設計要求を満たす、例えば各ジョイントの角度やリンクの長さなどの設計変数は無数にある。よって、これらの各要素の設計変数を手計算で算出すると、多大な時間と労力が必要となる。このような事情から、パラレルリンク機構の各要素の設計変数を絞り込むことができる装置の開発が望まれている。
【0005】
本発明は、上記の課題に鑑みてなされたものであって、設計者の負担を軽減できるパラレルリンク機構の設計支援装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するため、本発明の一態様に係るパラレルリンク機構の設計支援装置は、ツールの中心線上にある回転中心を中心に姿勢変換を行うパラレルリンク機構において、要求される前記ツールの姿勢角度の可動域を満たす設計変数を絞り込む。前記パラレルリンク機構は、固定ベースと、前記ツールを支持するエンドエフェクタベースと、前記固定ベースと前記エンドエフェクタベースとを連結する複数のリンク機構と、を備える。前記リンク機構は、前記固定ベースに回転自在に連結する基部側ジョイントと、一端が前記基部側ジョイントと連結する基部側リンクと、前記基部側リンクの他端に設けられた中間ジョイントと、前記中間ジョイントを介して一端が前記基部側リンクと回転自在に連結する先端側リンクと、前記先端側リンクの他端と前記エンドエフェクタベースとを回転自在に連結する先端側ジョイントと、を有する。絞り込まれる前記設計変数は、前記基部側ジョイントと前記中間ジョイントとがなす第1角度と、前記中間ジョイントと前記先端側ジョイントとがなす第2角度と、前記回転中心から前記固定ベースに引いた垂線である基準線と前記先端側ジョイントとがなす第3角度と、前記基準線と前記基部側ジョイントとがなす第4角度と、である。要求される前記ツールの姿勢角度の可動域と、前記第1角度、前記第2角度、前記第3角度、及び前記第4角度のそれぞれが設定可能な所定の角度と、を記憶する。前記所定の角度から選択された前記第1角度、前記第2角度、前記第3角度、及び前記第4角度をそれぞれ含む組み合わせ角度であって、前記第1角度、前記第2角度、前記第3角度、及び前記第4角度のうち少なくとも1つが異なる複数の前記組み合わせ角度を準備する。準備した複数の前記組み合わせ角度から1つの前記組み合わせ角度を選択する。選択した前記組み合わせ角度と、前記ツールの初期姿勢の角度と、を第1次逆運動学方程式に代入する。前記第1次逆運動学方程式の判別式により前記パラレルリンク機構の成立要件を満たすかを判定する第1次絞り込み判定する。前記成立要件を満たすと判定した前記組み合わせ角度を第1次組み合わせ角度と認定する。第1次絞り込み判定した後、改めて複数の前記組み合わせ角度から他の前記組み合わせ角度を選択し第1次絞り込み判定することを繰り返し行うことで、複数の前記組み合わせ角度を、複数の前記第1次組み合わせ角度に絞り込む。複数の前記第1次組み合わせ角度から1つの前記第1次組み合わせ角度を選択する。前記ツールの可動域から選択された選択姿勢角度を選択する。選択した前記第1次組み合わせ角度と、前記選択姿勢角度と、を第2次逆運動学方程式に代入する。前記第2次逆運動学方程式の判別式により前記パラレルリンク機構の成立要件を満たすかを判定する第2次絞り込み判定する。第2次絞り込み判定した後、選択した前記第1次組み合わせ角度をそのままとし、改めて前記ツールの姿勢角度の可動域から他の前記選択姿勢角度を選択し第2次絞り込み判定することを繰り返し行うことで、前記ツールの姿勢角度の可動域における全ての前記ツールの姿勢角度で前記成立要件を満たすと判定した前記第1次組み合わせ角度を第2次組み合わせ角度と認定する。選択した1つの前記第1次組み合わせ角度の前記第2次絞り込み判定が終了した場合、改めて複数の前記第1次組み合わせ角度から他の前記第1次組み合わせ角度を選択し第2次絞り込み判定することを繰り返すことで、複数の前記第1次組み合わせ角度を、第2次組み合わせ角度に絞り込む。
【0007】
本開示によれば、組み合わせ角度(第1角度、第2角度、第3角度、及び第4角度)の設計変数が絞り込まれ、設計者の負担が軽減される。
【0008】
また、一態様に係る前記パラレルリンク機構の設計支援装置において、前記ツールが初期姿勢の場合における前記第1次組み合わせ角度の第1ヤコビアンを算出する。前記ツールが前記選択姿勢角度の場合における前記第2次組み合わせ角度の第2ヤコビアンを算出する。前記第1ヤコビアンの符号関数と前記第2ヤコビアンの符号関数を算出する。前記第2ヤコビアンの符号関数と前記第2ヤコビアンの符号関数とが等しいかを特異点判定する等しくない判定した前記第1次組み合わせ角度を前記第2次組み合わせ角度に認定しない。
【0009】
前記構成によれば、複数の組み合わせ角度のうち、パラレルリンク機構を制御できない特異点を含む組み合わせ角度が除外される。よって、組み合わせ角度(第1角度、第2角度、第3角度、及び第4角度)が絞り込まれ、設計者の負担がさらに軽減される。
【0010】
また、一態様に係る前記パラレルリンク機構の設計支援装置において、前記パラレルリンク機構の回転中心が前記ツールの先端に配置された場合、前記組み合わせ角度に含まれる前記第3角度の範囲を90°から180°未満に絞り込み、前記第4角度の範囲を0°から90°未満に絞り込む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精工株式会社
駆動装置
1か月前
日本精工株式会社
軸受装置
13日前
日本精工株式会社
操舵装置
3日前
日本精工株式会社
減速装置
1か月前
日本精工株式会社
転がり軸受
3日前
日本精工株式会社
駆動輪及び台車
3日前
日本精工株式会社
直動案内軸受装置
6日前
日本精工株式会社
リニアガイド装置
13日前
日本精工株式会社
ハブユニット軸受
23日前
日本精工株式会社
車両用アクチュエータ
1か月前
日本精工株式会社
車両用アクチュエータ
1か月前
日本精工株式会社
車両用アクチュエータ
1か月前
日本精工株式会社
冠型保持器、及び玉軸受
4日前
日本精工株式会社
ボールねじ及び工作機械
1か月前
日本精工株式会社
樹脂製保持器の製造方法
3日前
日本精工株式会社
ボールねじ及びブレーキ装置
12日前
日本精工株式会社
スライダ、及び直動案内装置
17日前
日本精工株式会社
転動体保持器、リニアガイド
23日前
日本精工株式会社
軸受装置及び潤滑剤状態検出方法
19日前
日本精工株式会社
ウォームホイール及びその製造方法
1か月前
日本精工株式会社
パラレルリンク機構の設計支援装置
1か月前
日本精工株式会社
転がり軸受及び転がり軸受の製造方法
6日前
日本精工株式会社
転がり軸受及び転がり軸受の製造方法
6日前
日本精工株式会社
ハブユニット軸受及び、ハブ輪の製造方法
25日前
日本精工株式会社
電動駆動装置及び電動パワーステアリング装置
1か月前
日本精工株式会社
トルクセンサ装置及びトルクセンサ装置の製造方法
3日前
日本精工株式会社
検出回路、放電回路、制御装置およびモータシステム
23日前
日本精工株式会社
直動案内装置及び直動案内装置への潤滑油供給量の測定方法
6日前
日本精工株式会社
ステアリング装置、および、ハウジングとフレームとの結合構造
1か月前
日本精工株式会社
細胞注入装置、及び外来細胞を内包するオルガノイドの作成方法
1か月前
日本精工株式会社
電動パワーステアリング装置および電動パワーステアリング装置の製造方法
10日前
日本精工株式会社
転動装置における水素発生量予測方法、これに用いられる水素発生試験装置、及び、転動装置における白色組織剥離の可能性評価方法
1か月前
個人
暗号化記憶媒体
1か月前
個人
環境情報処理装置
10日前
個人
外食予約システム
10日前
個人
求人支援システム
27日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ