TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024042193
公報種別
公開特許公報(A)
公開日
2024-03-28
出願番号
2022146736
出願日
2022-09-15
発明の名称
半導体装置
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人明成国際特許事務所
主分類
G06N
3/063 20230101AFI20240321BHJP(計算;計数)
要約
【課題】電力の消費効率を向上する。
【解決手段】半導体装置(1)は、複数の積和演算回路(11)を含み、ニューラルネットワークを用いた処理に使用されるハードウェアアクセラレータと、アクティブにする積和演算回路の割合を示す目標値が、ニューラルネットワークのモデルごとに、設定された目標テーブル(51)と、目標テーブルを参照し、実行対象となるニューラルネットワークのモデルについて設定されている目標値に応じて、複数の積和演算回路への電力の供給または電力供給の停止を個別に制御する電源制御部(50)と、半導体装置において処理が実行されているときに、複数の積和演算回路の実使用率を観測するモニタ部(30)と、半導体装置において処理が実行されているときに、目標値の更新が必要である場合、実使用率に基づいて新たな目標値を設定し、新たな目標値で目標テーブルを更新するテーブル更新部(54)と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
半導体装置(1)であって、
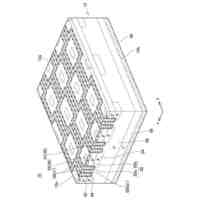
複数の積和演算回路(11)を含み、ニューラルネットワークを用いた処理に使用されるハードウェアアクセラレータと、
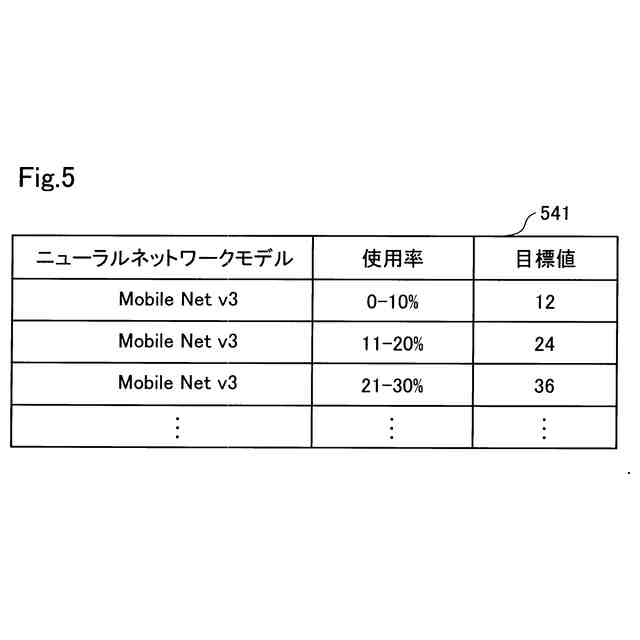
前記複数の積和演算回路のうちアクティブにする積和演算回路の割合を示す目標値が、ニューラルネットワークのモデルごとに、設定された目標テーブル(51)と、
前記目標テーブルを参照し、前記半導体装置における実行対象となるニューラルネットワークのモデルについて設定されている前記目標値に応じて、前記複数の積和演算回路への電力の供給または電力供給の停止を個別に制御する電源制御部(50)と、
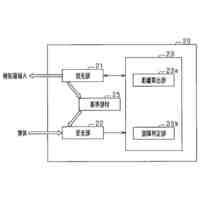
前記半導体装置において処理が実行されているときに、前記複数の積和演算回路の実使用率を観測するモニタ部(30)と、
前記半導体装置において処理が実行されているときに、前記目標値の更新が必要である場合、前記実使用率に基づいて新たな前記目標値を設定し、新たな前記目標値で前記目標テーブルを更新するテーブル更新部(54)と、
を備える半導体装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の半導体装置であって、
前記複数の積和演算回路は、同じ構成を備え、
前記目標値は、前記複数の積和演算回路のうち、電力供給の対象である前記積和演算回路の数を示し、
前記電源制御部は、前記複数の積和演算回路のうち、前記目標値が示す前記数の前記積和演算回路へ電力を供給し、残りの前記積和演算回路へ電力を供給しない、
半導体装置。
【請求項3】
請求項2に記載の半導体装置であって、
前記テーブル更新部は、
前記複数の積和演算回路のうちの電力供給の対象である前記積和演算回路の割合と、前記実使用率と、の差が、あらかじめ設定された値以上であるときを、前記目標値の更新が必要である場合として、
あらかじめ決められた期間に観測された前記実使用率の最大値に、あらかじめ決められた係数を乗じることにより得られる第1値に基づいて、前記目標値を設定する、
半導体装置。
【請求項4】
請求項2に記載の半導体装置であって、
前記テーブル更新部は、
前記複数の積和演算回路のうちの電力供給の対象である前記積和演算回路の割合と、前記実使用率と、の差が、あらかじめ設定された値以上であるときを、前記目標値の更新が必要である場合として、
あらかじめ決められた期間に観測された前記実使用率の平均値に基づいて、前記目標値を設定する、
半導体装置。
【請求項5】
請求項2に記載の半導体装置であって、
前記テーブル更新部は、
前記複数の積和演算回路のうちの電力供給の対象である前記積和演算回路の割合と、前記実使用率と、の差が、あらかじめ設定された値以上であるときを、前記目標値の更新が必要である場合として、
機械学習により生成され、前記実使用率を予測する機械学習モデルを用いて予測された前記実使用率の予測値に基づいて、前記目標値を更新する、
半導体装置。
【請求項6】
請求項2に記載の半導体装置であって、
前記実使用率と前記目標値とを対応付けた目標値特定テーブルをさらに備え、
前記テーブル更新部は、
前記複数の積和演算回路のうちの電力供給の対象である前記積和演算回路の割合と、前記実使用率と、の差が、あらかじめ設定された値以上であるときを、前記目標値の更新が必要である場合として、
前記目標値特定テーブルを参照し、あらかじめ決められた期間に観測された前記実使用率の最大値、または、あらかじめ決められた期間に観測された前記実使用率の平均値、に応じた、前記目標値を設定する、
半導体装置。
【請求項7】
請求項3から6のいずれか1項に記載の半導体装置であって、
前記モニタ部は、あらかじめ設定された時間間隔ごとに、前記実使用率を観測し、
前記テーブル更新部は、前記モニタ部から観測結果を受け、前記目標値の更新が必要である場合、前記目標値を更新し、
今回の前記差が、以前の前記差より、大きいことを含むあらかじめ決められた期間変更条件が満たされている場合、前記モニタ部は、前記実使用率を観測する前記時間間隔を短縮する、
半導体装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、半導体装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1には、半導体集積回路の消費電力を削減するための技術が記載されている。特許文献1に記載された技術においては、半導体集積回路の温度に対応するリーク電流を求め、リーク電流の大きさに応じて、パワーゲーティング手法、または、DVFS(Dynamic Voltage Frequency Scaling)手法を採用することにより、消費電力を削減する。
【0003】
また、深層学習が普及したことにより、半導体集積回路のうちには、ニューラルネットワークを用いた処理を実行するのに特化したニューラルネットワーク用の半導体集積回路が存在する。ニューラルネットワーク用の半導体集積回路においては、処理の高速化のため、処理の一部または全部が専用のハードウェアにより実行されることがある(以下、専用のハードウェアを「ハードウェアアクセラレータ」という)。ニューラルネットワークにおいては、積和演算を主な演算とする。このため、ニューラルネットワーク用の半導体集積回路が備えるハードウェアアクセラレータは、複数の積和演算回路を含む。
【先行技術文献】
【特許文献】
【0004】
国際公開第2009/078081号
【発明の概要】
【発明が解決しようとする課題】
【0005】
実行の対象となるニューラルネットワークのモデルによっては、ハードウェアアクセラレータに含まれる複数の積和演算回路のうち、一部しか使用されないこともある。このような場合であっても、すべての積和演算回路へ電力の供給が行われていると、電力が不必要に消費される。よって、電力の消費効率の向上が望まれていた。
【課題を解決するための手段】
【0006】
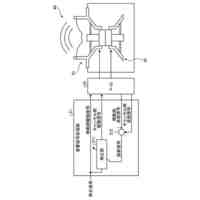
本開示の一形態によれば、半導体装置が提供される。この半導体装置(1)は、複数の積和演算回路(11)を含み、ニューラルネットワークを用いた処理に使用されるハードウェアアクセラレータと、前記複数の積和演算回路のうちアクティブにする積和演算回路の割合を示す目標値が、ニューラルネットワークのモデルごとに、設定された目標テーブル(51)と、前記目標テーブルを参照し、前記半導体装置における実行対象となるニューラルネットワークのモデルについて設定されている前記目標値に応じて、前記複数の積和演算回路への電力の供給または電力供給の停止を個別に制御する電源制御部(50)と、前記半導体装置において処理が実行されているときに、前記複数の積和演算回路の実使用率を観測するモニタ部(30)と、前記半導体装置において処理が実行されているときに、前記目標値の更新が必要である場合、前記実使用率に基づいて新たな前記目標値を設定し、新たな前記目標値で前記目標テーブルを更新するテーブル更新部(54)と、を備える。
【0007】
このような態様によれば、実行対象となるニューラルネットワークのモデルごとに設定されている目標値に応じて、複数の積和演算回路の電力の供給または電力供給の停止を個別に制御するので、すべての積和演算回路への電力の供給およびクロック信号の供給を行う態様に比べて、電力が不必要に消費されることがない。また、目標値は、実行対象となるニューラルネットワークのモデルに応じて設定されるので、ニューラルネットワークを用いた処理のパフォーマンスを低下させることなく、積和演算回路への電力供給の制御を行うことができる。このようにして、電力の消費効率を向上させることができる。
さらに、半導体装置において処理が実行されているときに、実使用率に基づいて目標値を更新するので、積和演算回路の実際の使用状況に応じて、目標値を更新することができる。よって、電力の消費効率を向上させることができる。
【図面の簡単な説明】
【0008】
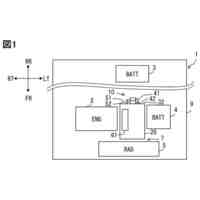
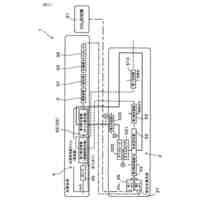
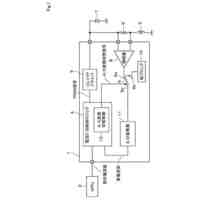
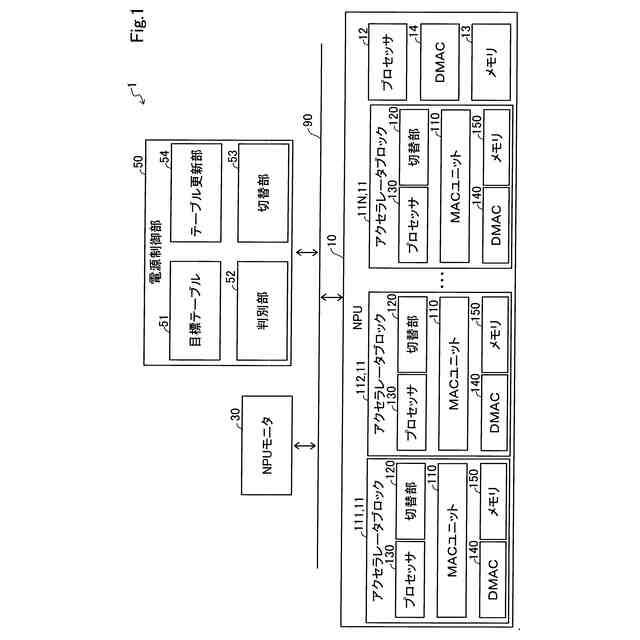
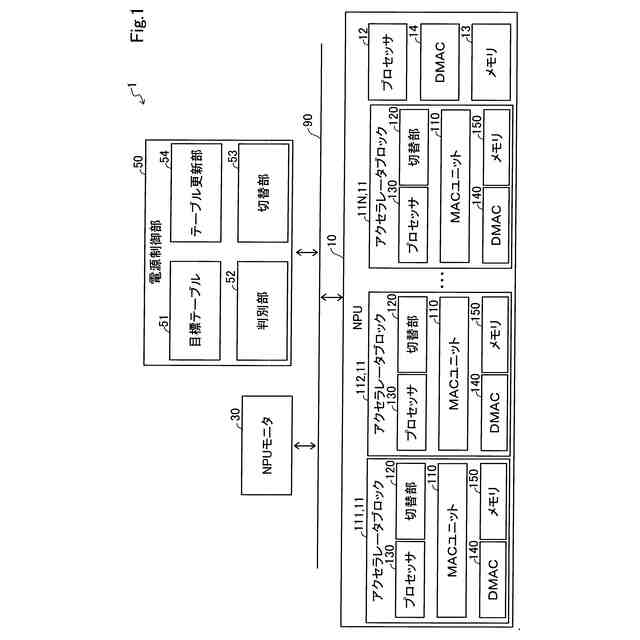
半導体装置の構成を表すブロック図である。
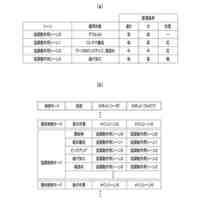
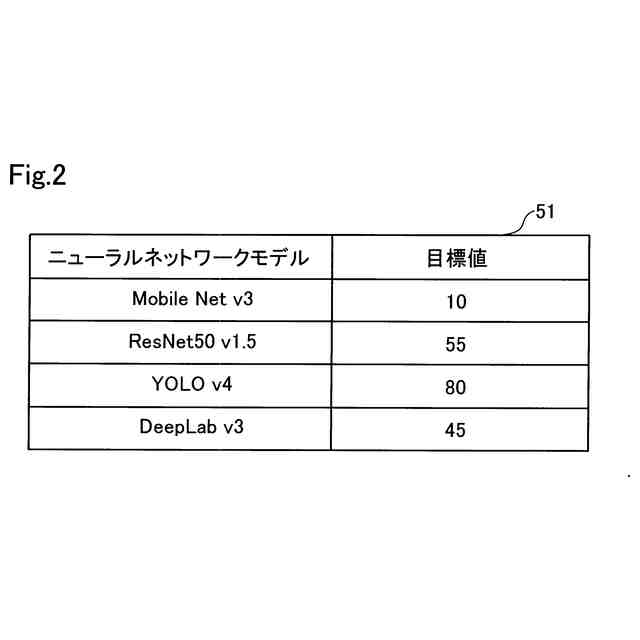
目標テーブルを示す図である。
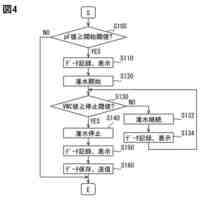
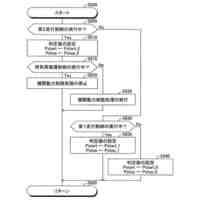
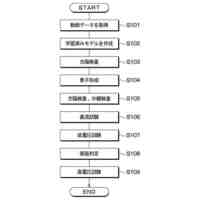
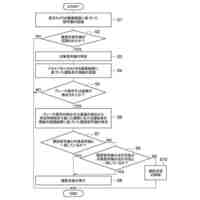
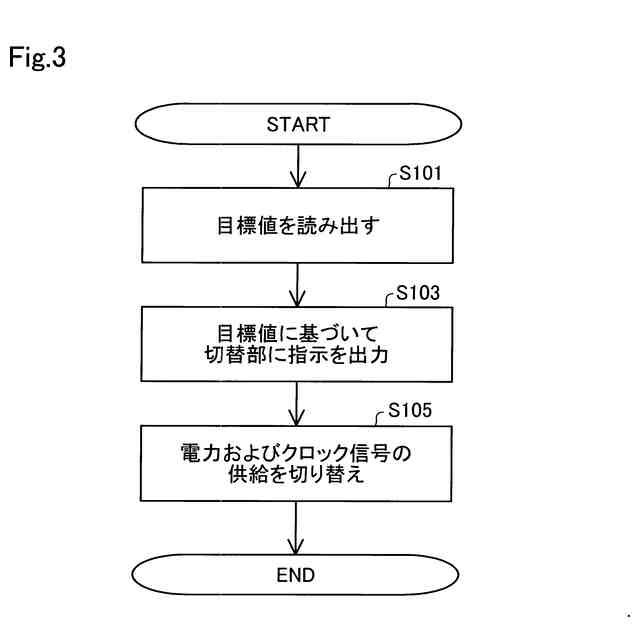
パワーゲーティング処理のフローチャートである。
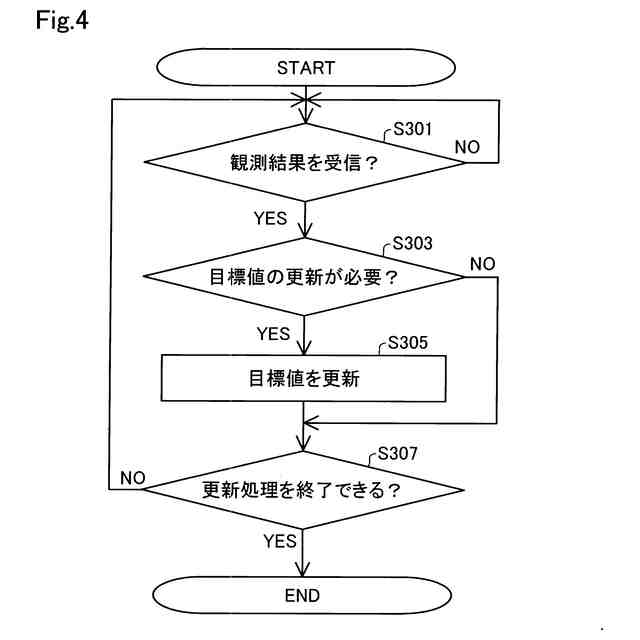
目標値の更新処理のフローチャートである。
目標値特定テーブルを示す図である。
【発明を実施するための形態】
【0009】
A.実施形態
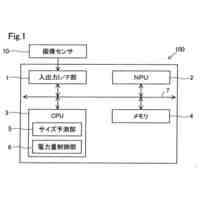
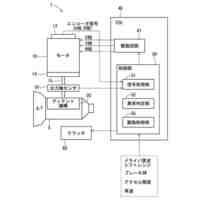
図1に示すように、実施形態にかかる半導体装置1は、ニューラルネットワークを用いた処理を実行する。例えば、半導体装置1は、自動車に搭載されている制御ユニットに備えられている。この制御ユニットには、ADAS(Advanced Driving Assistant System: 先進運転システム)用ECU(Electrical Control Unit)も備えられている。半導体装置1は、ADAS用ECUが自動車の周囲の状況を把握する処理を行う際に、自動車に装備されているカメラが撮影した画像データに基づいて、画像認識に関する処理を実行する。半導体装置1は、NPU(Neural Processing Unit/Neural network Processing Unit)10と、NPUモニタ30と、電源制御部50と、バス90とを備える。
【0010】
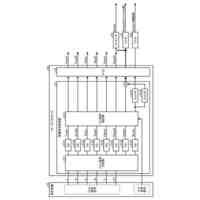
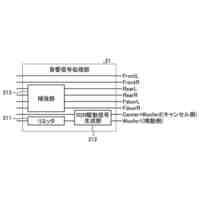
NPU10は、ニューラルネットワークを用いた処理を実行する。本明細書において、ニューラルネットワークは、3層構造のニューラルネットワークだけではなく、4層以上のDNN(Deep Neural Network)、畳み込み層とプーリング層とを有するCNN(Convolutional Neural Network)等を含むものとする。NPU10は、N個(Nは1以上の整数)のNNアクセラレータ11と、プロセッサ12と、メモリ13と、DMAC(Direct Memory Access Controller)14とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
変調器
13日前
株式会社デンソー
構造体
4日前
株式会社デンソー
回転電機
6日前
株式会社デンソー
半導体装置
5日前
株式会社デンソー
電流検出装置
6日前
株式会社デンソーウェーブ
警備システム
13日前
株式会社デンソー
電力変換装置
5日前
株式会社デンソー
電力変換装置
5日前
株式会社デンソーテン
音響制御装置
6日前
株式会社デンソー
制動制御装置
11日前
株式会社デンソー
虚像表示装置
4日前
株式会社デンソー
情報処理装置
13日前
株式会社デンソーテン
音響制御装置
6日前
株式会社デンソーテン
音響制御装置
6日前
株式会社デンソー
電池監視装置
6日前
株式会社デンソー
巻線界磁ロータ
4日前
株式会社デンソー
モータ制御装置
5日前
株式会社デンソーウェーブ
レーザレーダ装置
13日前
株式会社デンソー
スイッチング素子
11日前
株式会社デンソーウェーブ
ロボットシステム
11日前
株式会社デンソー
回転電機のステータ
4日前
株式会社デンソーウェーブ
ロボット制御システム
4日前
株式会社デンソー
炭化水素生成システム
12日前
株式会社デンソーウェーブ
ロボット制御システム
4日前
株式会社デンソー
車両用表示制御システム
5日前
株式会社デンソー
半導体装置とその製造方法
4日前
株式会社デンソー
潅水システムおよび制御装置
13日前
株式会社デンソー
干渉判定装置及び経路生成装置
11日前
株式会社デンソー
リニアソレノイド電流制御装置
4日前
株式会社デンソーテン
音響制御装置及び音響制御方法
6日前
株式会社デンソー
コード形成方法、及び情報コード
11日前
株式会社デンソー
巻線用整形装置及び巻線用整形方法
6日前
トヨタ自動車株式会社
車両走行装置
4日前
株式会社デンソー
半導体装置の製造方法および製造装置
7日前
トヨタ自動車株式会社
運転支援装置
11日前
トヨタ自動車株式会社
駐車支援装置
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ