TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024031035
公報種別
公開特許公報(A)
公開日
2024-03-07
出願番号
2022134326
出願日
2022-08-25
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20240229BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動走行する機体において、施肥装置の作業状態や異常を遠方から判断できる作業車両を提供することを目的とする。
【解決手段】衛星測位システムから送信される測位情報を位置情報受信アンテナによって受信して、走行車体の位置情報を取得する位置情報取得装置と、位置情報取得装置を所定の位置において支持するアンテナフレームと、位置情報取得装置によって取得した位置情報に基づいて走行車体を自律走行させる制御装置と、制御装置へ操作信号を送信して走行車体の遠隔操作が可能なリモコン装置と、走行車体に設けられ、リモコン装置から送信される操作信号を受信する受信機と、施肥装置のホッパ内の肥料残量を検知する残量センサと、肥料を圃場へ案内する施肥ホースの詰まりを検知する肥料詰まりセンサを設け、リモコン装置に肥料残量と肥料詰まりに関する表示をする。
【選択図】図7
特許請求の範囲
【請求項1】
圃場内を走行可能な走行車体と、
前記走行車体に設けられ、圃場内で作業を行う作業機と、
圃場に肥料を散布する施肥装置と、肥料を圃場に搬送するブロア装置と、
前記走行車体に設けられ、衛星測位システムから送信される測位情報を位置情報受信アンテナによって受信して、前記走行車体の位置情報を取得する位置情報取得装置と、
前記位置情報取得装置を所定の位置において支持するアンテナフレームと、
前記位置情報取得装置によって取得した前記位置情報に基づいて前記走行車体を自律走行させる制御装置と、
前記制御装置へ操作信号を送信して前記走行車体の遠隔操作が可能なリモコン装置と、
前記走行車体に設けられ、前記リモコン装置から送信される前記操作信号を受信する受信機と、
施肥装置のホッパ内の肥料残量を検知する残量センサと、肥料を圃場へ案内する施肥ホースの詰まりを検知する肥料詰まりセンサを設け、
前記リモコン装置に肥料残量と肥料詰まりに関する表示をすることを特徴とする作業車両。
続きを表示(約 180 文字)
【請求項2】
施肥装置による肥料散布が無散布状態であるときは、前記残量センサと前記肥料詰まりセンサの検出を行わないことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記リモコン装置により前記残量センサと前記肥料詰まりセンサの入り切りと、肥料残量と肥料詰まりに関する表示の有無を設定できることを特徴とする請求項2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、圃場内を走行しながら作業を行う作業車両には、衛星測位システムを利用して自車両の位置情報を取得する位置情報取得装置を備え、位置情報取得装置によって取得した位置情報に基づいて、制御装置による自律走行を行うものがある。
【0003】
このような作業車両は、位置情報取得装置と、位置情報取得装置において衛星から送信される位置情報(信号)を受信する位置情報受信アンテナとを支持するアンテナフレームを備える(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2020-162454号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、圃場内を走行しながら作業を行う作業車両において、リモコン装置を用いて遠隔操作するために、リモコン装置から送信される操作信号を受信する操作信号受信アンテナを有する受信機をさらに備えることがある。また、従来、前輪および後輪を有する走行車両の後部に設けられ、圃場に肥料を供給する施肥装置が知られている。
【0006】
しかしながら、上記したような従来の作業車両では、施肥装置の作業状態や異常を検出することが困難である。
【0007】
本発明は、上記に鑑みてなされたものであって、自動走行する機体において、施肥装置の作業状態や異常を遠方から判断できる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
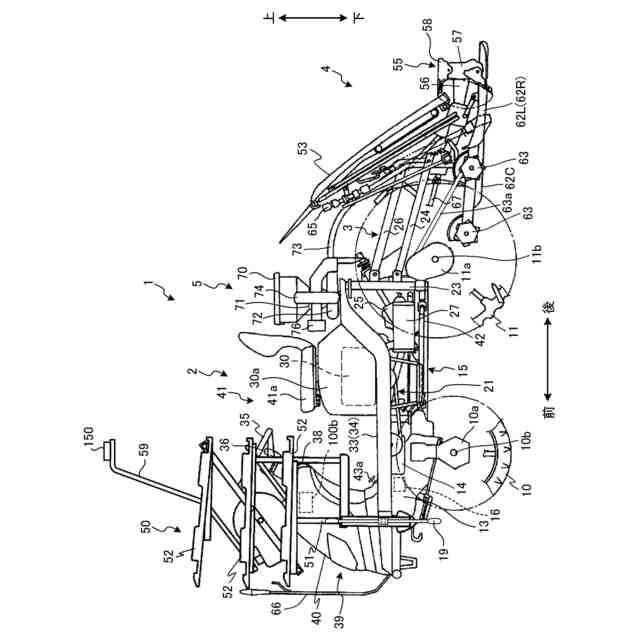
上述した課題を解決し、目的を達成するために、本発明に係る作業車両(1)は、圃場内を走行可能な走行車体(2)と、前記走行車体(2)に設けられ、圃場(F)内で作業を行う作業機(4)と、圃場(F)に肥料を散布する施肥装置(5)と、肥料を圃場(F)に搬送するブロア装置(74)と、前記走行車体(2)に設けられ、衛星測位システムから送信される測位情報を位置情報受信アンテナ(151)によって受信して、前記走行車体(2)の位置情報を取得する位置情報取得装置(150)と、前記位置情報取得装置(150)を所定の位置において支持するアンテナフレーム(59)と、前記位置情報取得装置(150)によって取得した前記位置情報に基づいて前記走行車体(2)を自律走行させる制御装置(100)と、前記制御装置(100)へ操作信号を送信して前記走行車体(2)の遠隔操作が可能なリモコン装置(160)と、前記走行車体(2)に設けられ、前記リモコン装置(160)から送信される前記操作信号を受信する受信機(140)と、施肥装置のホッパ(70)内の肥料残量を検知する残量センサ(HS)と、肥料を圃場へ案内する施肥ホースの詰まりを検知する肥料詰まりセンサ(TS)を設け、前記リモコン装置(160)に肥料残量と肥料詰まりに関する表示をすることを特徴とする。
【発明の効果】
【0009】
本発明に係る作業車両によれば、自律走行する機体の施肥装置の作業状態や異常を遠方から確認することができ、作業性が向上する。
【図面の簡単な説明】
【0010】
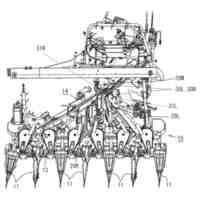
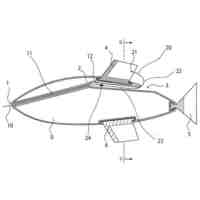
図1は、実施形態に係る作業車両の一例を示す概略左側面図である。
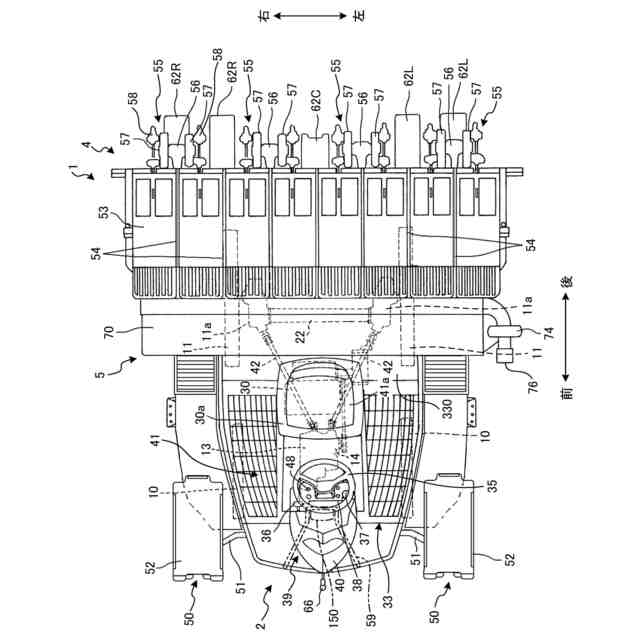
図2は、実施形態に係る作業車両の一例を示す概略平面図である。
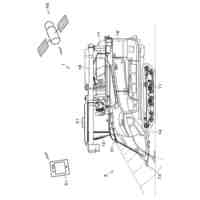
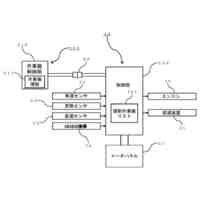
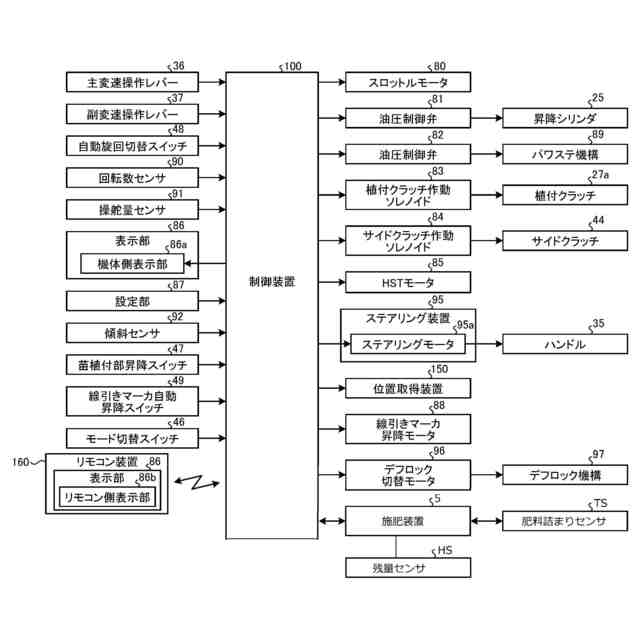
図3は、制御装置を中心とする制御系の一例を示すブロック図である。
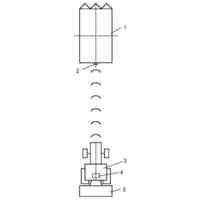
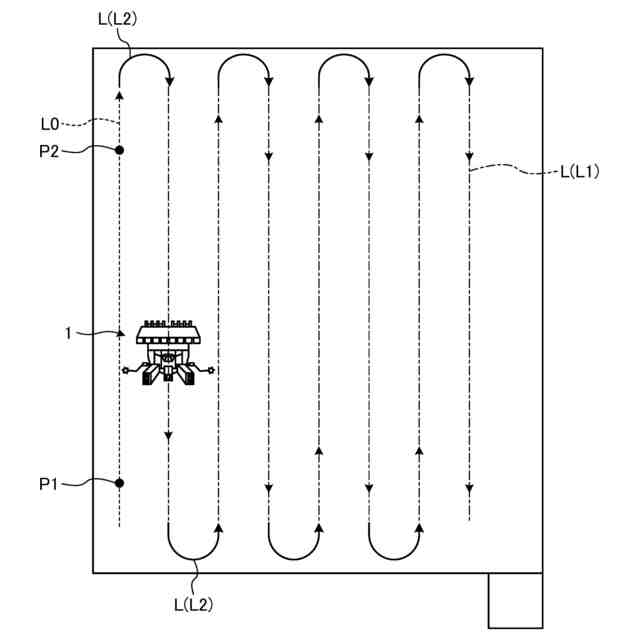
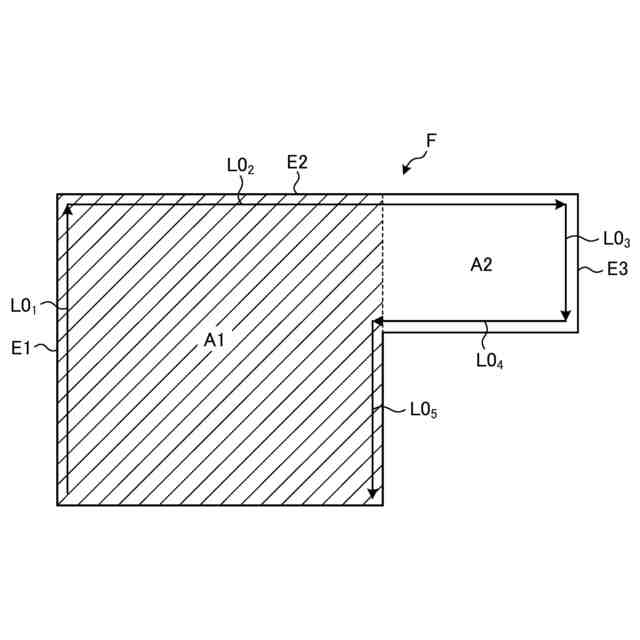
図4は、圃場内における自律走行の説明図である。
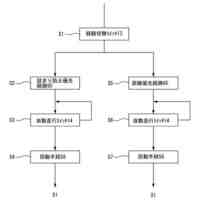
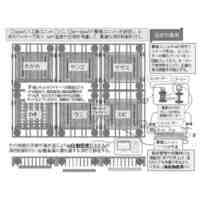
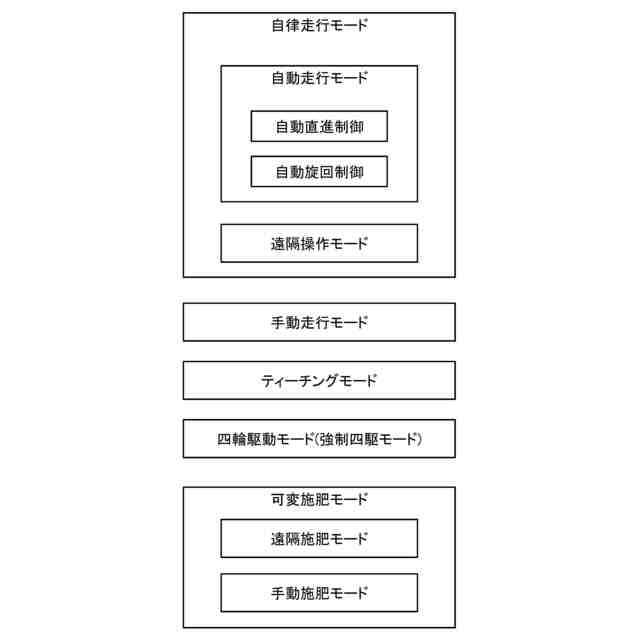
図5は、制御装置によって実行されるモード構成を示す図である。
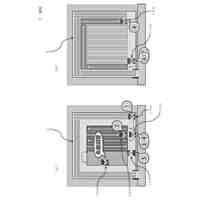
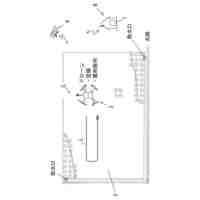
図6は、ティーチングモードにおける作業エリア情報取得の一例を示す図である。
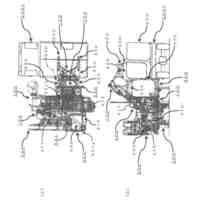
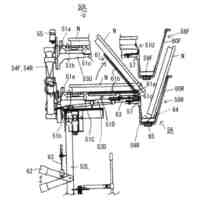
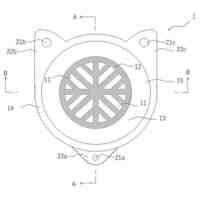
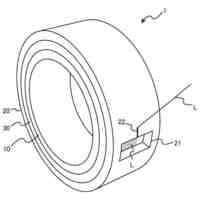
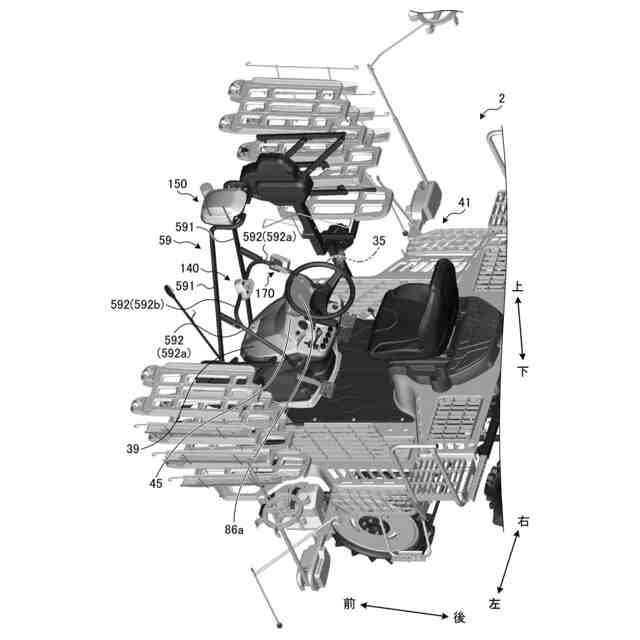
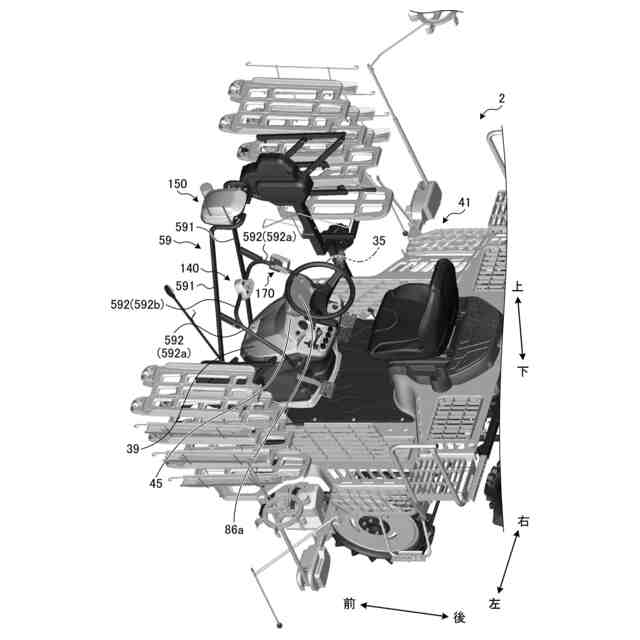
図7は、アンテナフレームおよび位置情報取得装置を示す概略斜視図である。
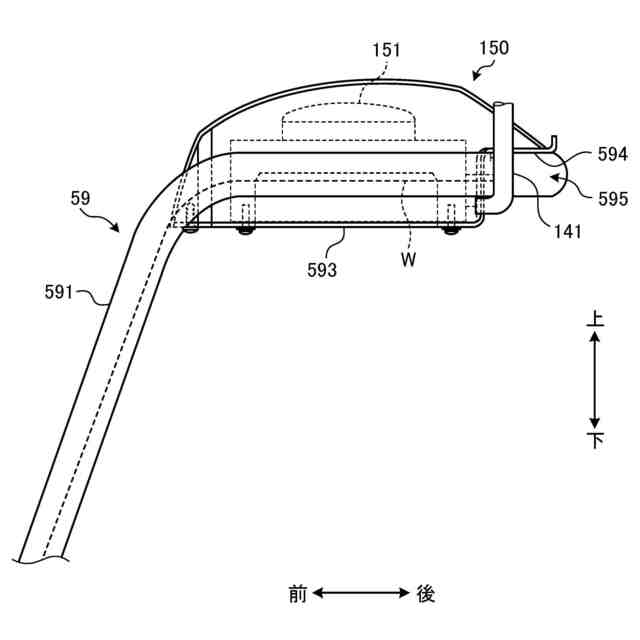
図8は、位置情報取得装置および操作信号受信アンテナを示す概略側面図である。
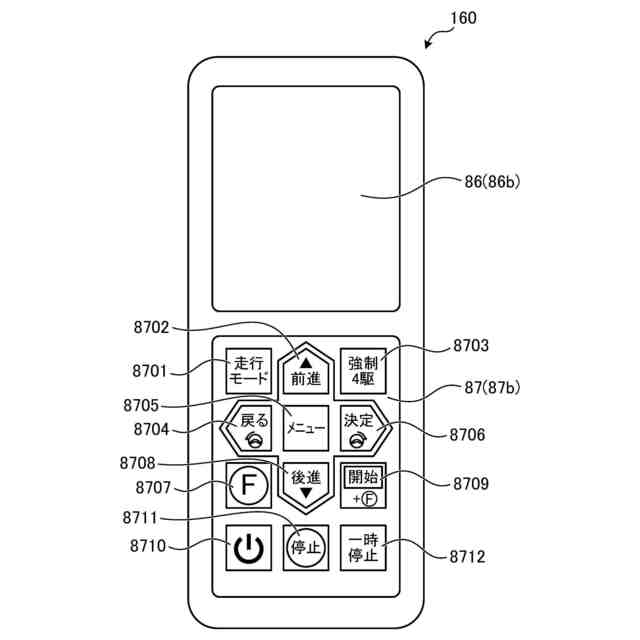
図9は、リモコン装置の説明図である。
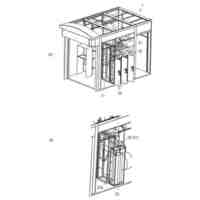
図10は、リモコンホルダーを示す概略斜視図である。
図11は、リモコンホルダーの配置を示す概略正面図である。
図12は、リモコンホルダーの配置を示す概略側面図である。
図13は、部分条クラッチの接続構成の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
19日前
井関農機株式会社
苗移植機
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
精米設備
16日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
乗用型苗植機
12日前
井関農機株式会社
防除システム
16日前
井関農機株式会社
穀稈の刈取作業方法
15日前
井関農機株式会社
複数作業車の連携制御システム
3日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
コンバイン
16日前
個人
産卵床
2日前
個人
魚釣用ルアー
24日前
個人
動物飼育用ケージ
9日前
個人
猫用のトイレ
9日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
18日前
個人
計量カップ付き肥料袋
22日前
個人
水中生物採集器
2日前
個人
木造人工島の海産物農業
18日前
井関農機株式会社
収穫機
19日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
苗移植機
9日前
株式会社大垣化工
糸収容具
10日前
株式会社大貴
動物用トイレ
2日前
日東電工株式会社
水槽
25日前
みのる産業株式会社
作業台車
11日前
井関農機株式会社
乗用型苗植機
12日前
井関農機株式会社
防除システム
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ