TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025178113
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2025037477
出願日
2025-03-10
発明の名称
移動体自律走行支援システム
出願人
株式会社ハイパーデジタルツイン
代理人
個人
,
個人
主分類
G05D
1/249 20240101AFI20251128BHJP(制御;調整)
要約
【課題】本発明は、実空間における移動体の安全な自律走行を支援することができる移動体自律走行支援システムを提供することを目的とする。
【解決手段】
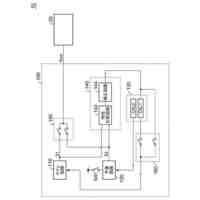
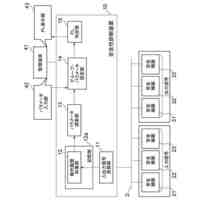
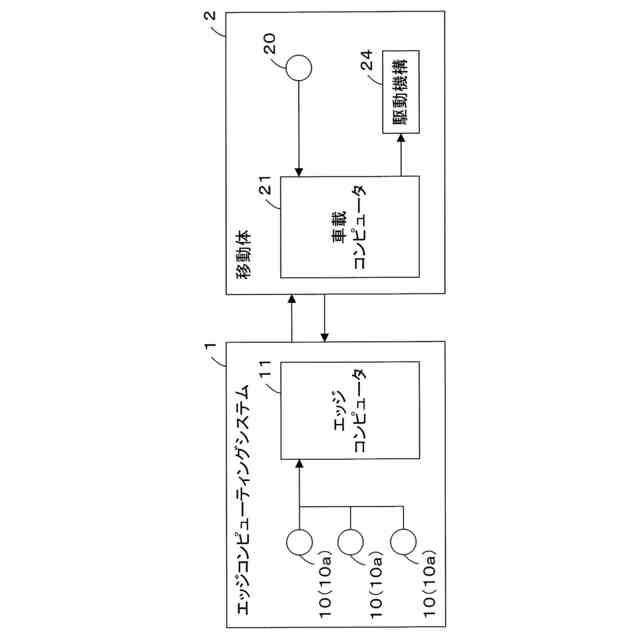
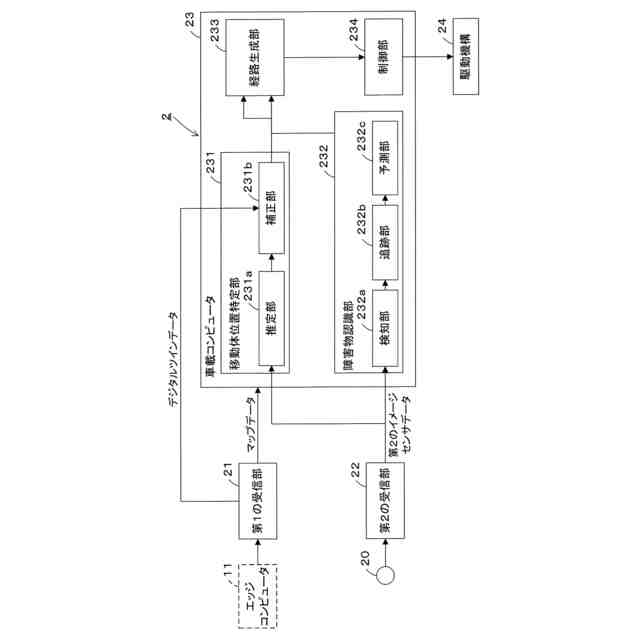
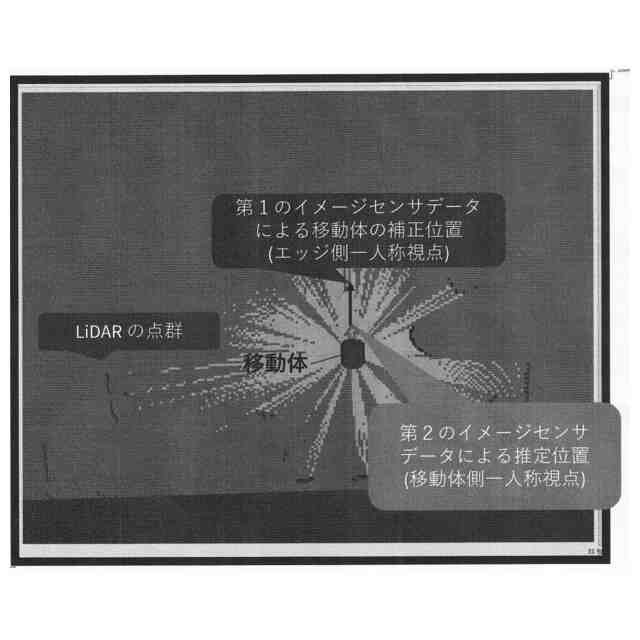
実空間の環境側に配置された第1のセンサ部10aを有するセンサ装置10と、センサ装置10に通信可能な状態で接続されたサーバ装置としてのエッジコンピュータ11と、該エッジコンピュータ11に通信可能な状態で接続され、第2のセンサ部20を有する移動体2とを備える。移動体2は、センサ装置10の第1のセンサ部10aにより取得された実空間における点群からなる第1のイメージセンサデータと、移動体2の第2のセンサ部20により取得された実空間における点群からなる第2のイメージセンサデータに基いて、実空間における移動体2の自己位置を特定したり、移動体2の周囲の障害物を認識することにより、移動体2の走行経路を生成する。
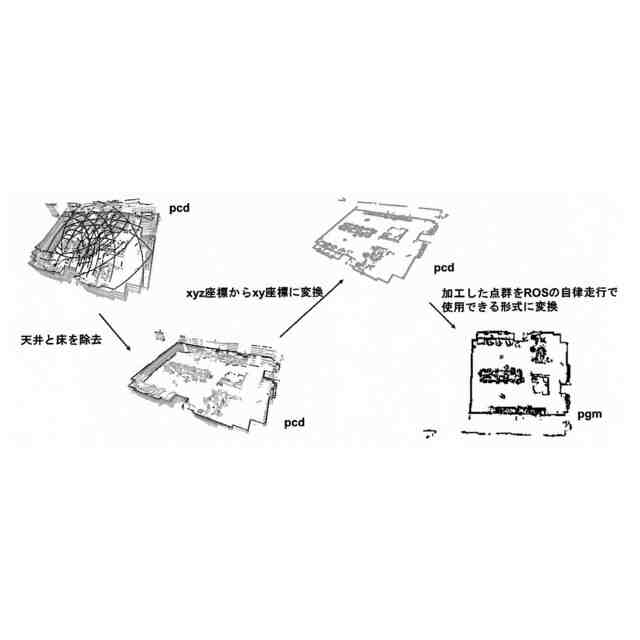
【選択図】図3
特許請求の範囲
【請求項1】
実空間の環境側に配置されたセンサ装置と、該センサ装置に通信可能な状態で接続されたサーバ装置と、該サーバ装置に通信可能な状態で接続された移動体とを備え、実空間における前記移動体の自律走行を支援する移動体自律走行支援システムであって、
前記センサ装置は、実空間における点群からなる第1のイメージセンサデータを取得する第1のセンサ部を備え、
前記移動体は、実空間における点群からなる第2のイメージセンサデータを取得する第2のセンサ部を備え、
前記サーバ装置または前記移動体は、
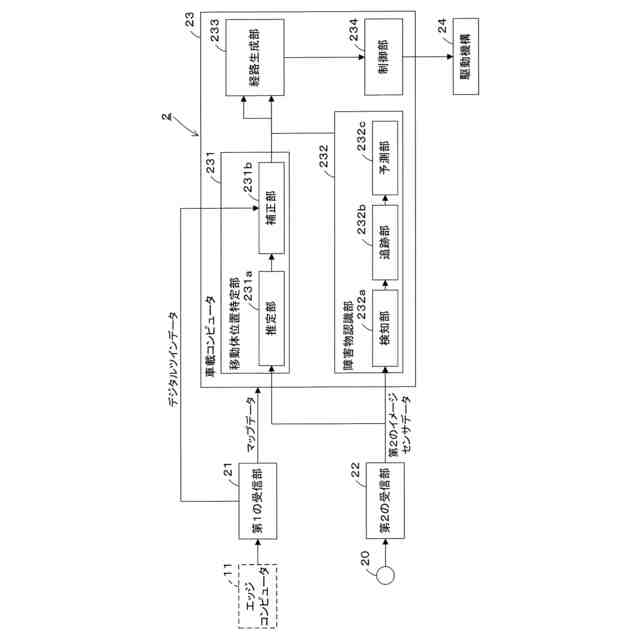
前記センサ装置の第1のセンサ部により取得された実空間における点群からなる第1のイメージセンサデータと、前記移動体の第2のセンサ部により取得された実空間における点群からなる第2のイメージセンサデータに基いて、実空間における前記移動体の位置を特定する移動体位置特定部を備えることを特徴とする移動体自律走行支援システム。
続きを表示(約 1,600 文字)
【請求項2】
前記移動体位置特定部は、前記移動体の前記第2のセンサ部により取得された実空間における点群からなる第2のイメージセンサデータに基いて、前記移動体の位置を推定する推定部と、前記センサ装置の前記第1のセンサ部により取得された実空間における点群からなる第1のイメージセンサデータに基いて、前記推定部により推定された前記移動体の位置を補正する補正部を備える請求項1に記載の移動体自律走行支援システム。
【請求項3】
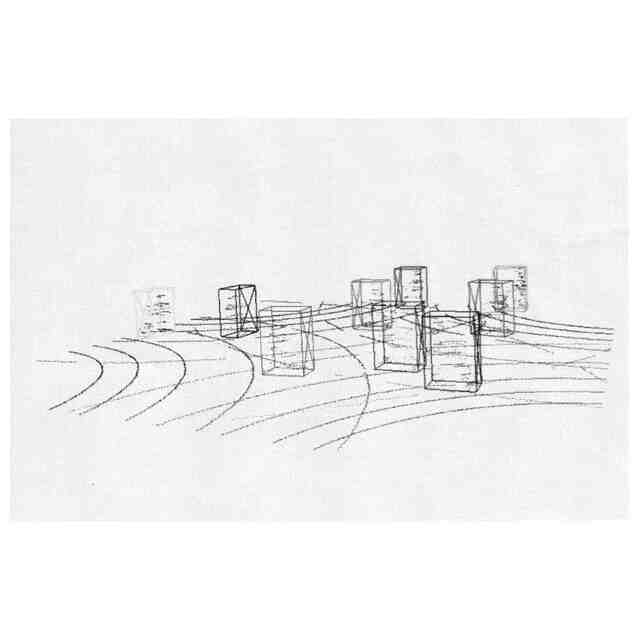
前記サーバ装置または前記移動体は、前記センサ装置の前記第1のセンサ部により取得された実空間における点群からなる第1のイメージセンサデータと、前記移動体の前記第2のセンサ部により取得された実空間における点群からなる第2のイメージセンサデータに基いて、実空間における障害物を認識する障害物認識部を備える請求項1に記載の移動体自律走行支援システム。
【請求項4】
前記障害物認識部は、前記移動体の周囲の障害物を検知する検知部と、前記検知部による障害物の検知結果に基いて前記障害物の軌跡を捉える追跡部と、前記追跡部により捉えられた前記障害物の軌跡に基いて所定時間経過後の前記障害物の位置を予測する予測部とを備える請求項3に記載の移動体自律走行支援システム。
【請求項5】
前記サーバ装置または前記移動体は、前記移動体位置特定部により特定された実空間における前記移動体の位置と、前記障害物認識部により特定された実空間における障害物の位置に基いて、実空間における前記移動体の走行経路を生成する経路生成部を備える請求項3に記載の移動体自律走行支援システム。
【請求項6】
前記サーバ装置または前記移動体は、前記センサ装置の前記第1のセンサ部により取得された実空間における点群からなる第1のイメージセンサデータまたは前記移動体の前記第2のセンサ部により取得された実空間における点群からなる第2のイメージセンサデータのいずれか一方の実空間における点群からなるイメージセンサデータを選択する選択部を備え、
前記移動体位置特定部は、前記選択部により選択された実空間における点群からなる第1のイメージセンサデータまたは第2のイメージセンサデータに基いて、実空間における前記移動体の位置を特定する請求項1に記載の移動体自律走行支援システム。
【請求項7】
前記選択部は、前記移動体の前記第2のセンサ部により取得された実空間における点群からなる第2のイメージセンサデータを優先的に選択し、実空間における点群からなる第2のイメージセンサデータが無効であると判断した場合、前記センサ装置の前記第1のセンサ部により取得された実空間における点群からなる第1のイメージセンサデータを選択する請求項6に記載の移動体自律走行支援システム。
【請求項8】
前記移動体は、前記経路生成部により生成された実空間における前記移動体の走行経路に基いて前記移動体の走行を制御する制御部を備える請求項5に記載の移動体自律走行支援システム。
【請求項9】
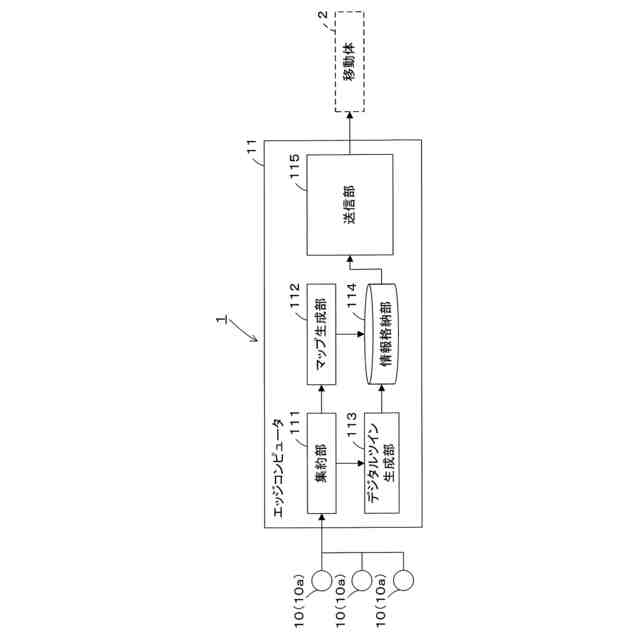
前記サーバ装置は、前記第1のセンサ部により取得された実空間における点群からなる第1のイメージセンサデータを集約する集約部を備える請求項1に記載の移動体自律走行支援システム。
【請求項10】
前記サーバ装置は、前記集約部により集約された実空間における点群からなる第1のイメージセンサデータに基いて、実空間のマップを生成するマップ生成部を備え、
前記移動体位置特定部は、前記移動体の位置を特定する際、前記マップ生成部により生成された実空間のマップに関する情報を用いる請求項9に記載の移動体自律走行支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、実空間における移動体の自律走行を支援する移動体自律走行支援システムに関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
近年、パーソナルモビリティ(PMV)は、柔軟なラストマイル移動、交通量と二酸化炭素排出量の削減、運動やレクリエーション、配達サービス、住民や観光客向けのモビリティサービス、ドアツードア旅行を可能にするなどの輸送ニーズに対するソリューションとして期待されている
【0003】
一方、現実世界の実体をデジタルで複製したデジタルツインが注目されている。デジタルツイン技術により、物理システムはデジタルツインによって生成されたフィードバックに応じてリアルタイムの動作を更新できる。デジタルツインフレームワークの概念は、乗用車やトラックはもとより、PMVでも議論する必要がある。
【0004】
そして、PMVのデジタルツインの最も重要な要素の1つは、デジタル世界において物理的な実在物を複製するためのリアルタイム監視システムであり、そのためのセンサとしてLIDAR(Light-Detection-and-ranging)技術の使用は空間情報を収集するための有望な手段である。LIDARにより収集されたデータからPMVはもとより、その他の車やトラックなどの移動体、歩行者の位置を特定できる(非特許文献1参照)。特に複数のLIDARセンサを用いることで、監視エリアの死角を減らし、重なり合うエリアの情報量を増やすことができるため、検討が進められてきた(例えば、非特許文献2参照)
【先行技術文献】
【非特許文献】
【0005】
G. Bhatti, H. Mohan, and R. R. Singh, “Towards the future of smart electric vehicles: Digital twin technology,” Renewable and Sustainable Energy Reviews, vol. 141, p. 110801, 2021.
C. Li, R. Shinkuma, T. Sato, and E. Oki, ``Real-time Data Selection and Merging for 3D-image Sensing Network with Multiple Sensors," IEEE Sensors Journal, Vol.21(19), pp.22058-22076, Aug. 2021.
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来の研究では、車載センサが無効化された場合の安全性については取り上げられてこなかった。特に、PMVの車載センサは、汚れや雪によるハードウェアの外部問題、ハードウェアの内部問題、マルウェア感染などのソフトウェアの問題により、簡単に無効化される虞がある。このような問題は、自動運転における致命的なエラーであるローカリゼーション(自己位置特定)の失敗につながる可能性があった。このため、PMVには、搭載された車載センサが無効になっても、車両が安全な位置に到達できる自律走行を保証することが必要である。そして、このような問題は、上述のようなPMVはもとより、実空間において自律的に走行する自動車、トラック、電動車椅子などの車両からなる移動体にも同様に生じ得るものであった。
【0007】
本発明は、上述の技術的背景に鑑みてなされたものであり、実空間における移動体の安全な自律走行を支援することができる移動体自律走行支援システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、上記目的を達成するために、実空間の環境側に配置されたセンサ装置と、該センサ装置に通信可能な状態で接続されたサーバ装置と、該サーバ装置に通信可能な状態で接続された前記移動体とを備え、実空間における前記移動体の自律走行を支援する移動体自律走行支援システムであって、前記センサ装置は、実空間における点群からなる第1のイメージセンサデータを取得する第1のセンサ部を備え、前記移動体は、実空間における点群からなる第2のイメージセンサデータを取得する第2のセンサ部を備え、前記サーバ装置または前記移動体は、前記センサ装置の第1のセンサ部により取得された実空間における点群からなる第1のイメージセンサデータと、前記移動体の第2のセンサ部により取得された実空間における点群からなる第2のイメージセンサデータに基いて、実空間における前記移動体の位置を特定する移動体位置特定部を備えることを特徴とする。
【0009】
また、前記移動体位置特定部は、前記移動体の第2のセンサ部により取得された実空間における点群からなる第2のイメージセンサデータに基いて、前記移動体の自己位置を推定する推定部と、前記センサ装置の第1のセンサ部により取得された実空間における点群からなる第1のイメージセンサデータに基いて、前記推定部により推定された前記移動体の自己位置を補正する補正部を備えてもよい。
【0010】
また、前記サーバ装置または前記移動体は、前記センサ装置の第1のセンサ部により取得された実空間における点群からなる第1のイメージセンサデータと、前記移動体の第2のセンサ部により取得された実空間における点群からなる第2のイメージセンサデータに基いて、実空間における障害物を認識する障害物認識部を備えてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
3か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
3か月前
オムロン株式会社
スレーブ装置
2か月前
愛知製鋼株式会社
車両用システム
3か月前
株式会社熊谷組
障害物の検出方法
2か月前
ローム株式会社
基準電圧源
3か月前
株式会社FUJI
加工機械ライン
4か月前
個人
作業車両自動化システム
4か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
9日前
新電元工業株式会社
作業用ロボット
1か月前
豊田合成株式会社
機器制御装置
2か月前
ローム株式会社
半導体集積回路
10日前
愛知製鋼株式会社
目標軌跡の設定方法
4か月前
トヨタ自動車株式会社
移動制御システム
3か月前
株式会社アサヒエンタープライズ
調整弁
25日前
株式会社ダイフク
搬送設備
4か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
3か月前
トヨタ自動車株式会社
生産管理システム
4か月前
トヨタ自動車株式会社
減圧弁
4か月前
株式会社ダイフク
物品搬送設備
2か月前
トヨタ自動車株式会社
クラッチペダル
3か月前
トヨタ自動車株式会社
制御装置
2か月前
カヤバ株式会社
減圧弁
2か月前
キヤノン株式会社
配送システム
3か月前
エイブリック株式会社
電流補償回路及び半導体装置
1か月前
マーク ヘイリー
消防ロボット
4か月前
株式会社ダイフク
物品搬送設備
17日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社テイエルブイ
減圧弁の制御装置
4か月前
キヤノン電子株式会社
加工システム、及び、加工装置
3か月前
日野自動車株式会社
自動運転装置
1か月前
株式会社TMEIC
安全性診断装置
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ