TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025171463
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024076834
出願日
2024-05-09
発明の名称
制御装置、制御方法、及び制御プログラム
出願人
株式会社国際電気通信基礎技術研究所
,
国立大学法人電気通信大学
代理人
弁理士法人秀和特許事務所
主分類
G05B
11/36 20060101AFI20251113BHJP(制御;調整)
要約
【課題】フィードフォワードで複数の補償を行う際におけるハイブリッドアクチュエータの動作の安定化を図るための技術を提供する。
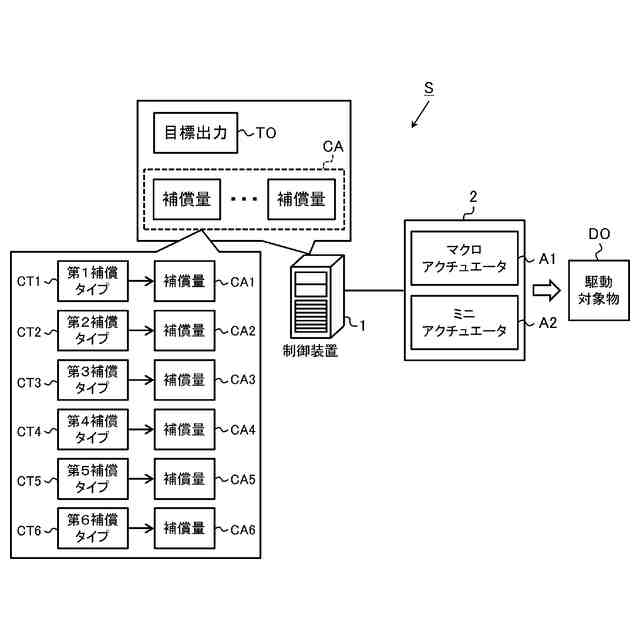
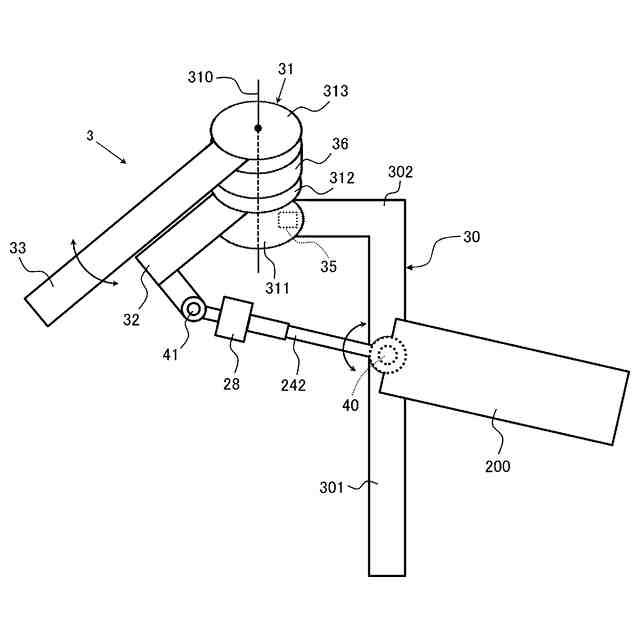
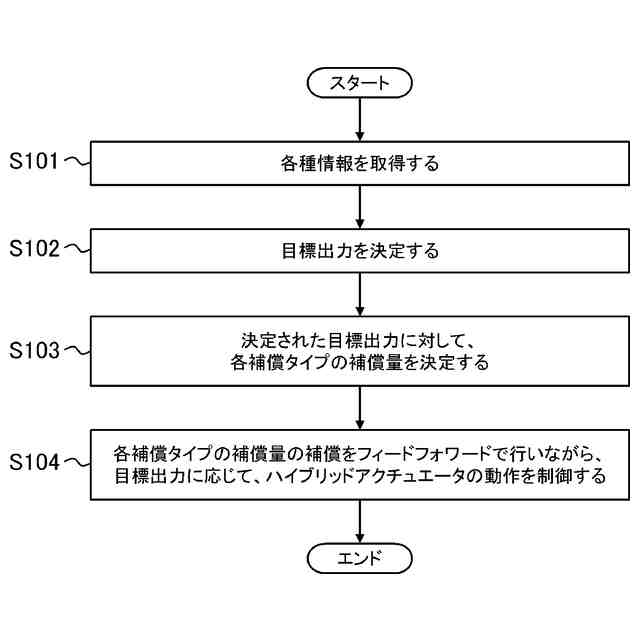
【解決手段】本開示の制御装置は、目標出力を決定し、各補償タイプの補償量を決定し、並びに各補償タイプの補償量の補償をフィードフォワードで行いながら、目標出力に応じて、ハイブリッドアクチュエータの動作を制御する。ハイブリッドアクチュエータのマクロアクチュエータ及びミニアクチュエータに対する各補償タイプの分配が決定されている。制御装置は、決定された分配に従って、マクロアクチュエータ及びミニアクチュエータの少なくとも一方により、各補償タイプの補償量の補償を行う。
【選択図】図1
特許請求の範囲
【請求項1】
目標出力を決定すること、
決定された前記目標出力に対して、複数の補償タイプそれぞれの補償量を決定すること、並びに
前記複数の補償タイプそれぞれの決定された前記補償量の補償をフィードフォワードで行いながら、決定された前記目標出力に応じて、マクロアクチュエータ及びミニアクチュエータを備えるハイブリッドアクチュエータの動作を制御すること、
を実行するように構成された制御部を備え、
前記マクロアクチュエータ及び前記ミニアクチュエータに対する前記複数の補償タイプの分配が決定されており、
前記複数の補償タイプそれぞれの前記補償量の補償を行うことは、決定された前記分配に従って、前記マクロアクチュエータ及び前記ミニアクチュエータの少なくとも一方により、前記複数の補償タイプそれぞれの前記補償量の補償を行うことにより構成される、
制御装置。
続きを表示(約 2,000 文字)
【請求項2】
前記複数の補償タイプは、前記ハイブリッドアクチュエータの駆動対象物の重力を補償する第1補償タイプを含み、
前記第1補償タイプは、前記マクロアクチュエータに分配され、
前記複数の補償タイプそれぞれの前記補償量の補償を行うことは、前記マクロアクチュエータにより前記第1補償タイプの補償量の補償を行うことを含む、
請求項1に記載の制御装置。
【請求項3】
前記ハイブリッドアクチュエータは、可動子及び固定子を含み、
前記固定子は、前記可動子の駆動により動くように構成され、
前記複数の補償タイプは、前記ハイブリッドアクチュエータの重力を補償する第2補償タイプを含み、
前記第2補償タイプは、前記マクロアクチュエータに分配され、
前記複数の補償タイプそれぞれの前記補償量の補償を行うことは、前記マクロアクチュエータにより前記第2補償タイプの補償量の補償を行うことを含む、
請求項1に記載の制御装置。
【請求項4】
前記複数の補償タイプは、前記ハイブリッドアクチュエータの駆動対象物の慣性を補償する第3補償タイプを含み、
前記第3補償タイプは、前記ミニアクチュエータに分配され、
前記複数の補償タイプそれぞれの前記補償量を補償することは、前記ミニアクチュエータにより前記第3補償タイプの補償量を補償することを含む、
請求項1に記載の制御装置。
【請求項5】
前記ハイブリッドアクチュエータは、可動子及び固定子を含み、
前記固定子は、前記可動子の駆動により動くように構成され、
前記複数の補償タイプは、前記ハイブリッドアクチュエータの慣性を補償する第4補償タイプを含み、
前記第4補償タイプは、前記ミニアクチュエータに分配され、
前記複数の補償タイプそれぞれの前記補償量の補償を行うことは、前記ミニアクチュエータにより前記第4補償タイプの補償量の補償を行うことを含む、
請求項1に記載の制御装置。
【請求項6】
前記複数の補償タイプは、前記ハイブリッドアクチュエータの駆動対象物で生じる摩擦力を補償する第5補償タイプを含み、
前記第5補償タイプは、前記駆動対象物の動作周波数に応じて、前記マクロアクチュエータ及び前記ミニアクチュエータの少なくともいずれかに分配され、
前記複数の補償タイプそれぞれの前記補償量の補償を行うことは、前記マクロアクチュエータ及び前記ミニアクチュエータの少なくともいずれかにより前記第5補償タイプの補償量の補償を行うことを含む、
請求項1に記載の制御装置。
【請求項7】
前記複数の補償タイプは、前記ハイブリッドアクチュエータで生じる摩擦力を補償する第6補償タイプを含み、
前記第6補償タイプは、前記ハイブリッドアクチュエータの動作周波数に応じて、前記マクロアクチュエータ及び前記ミニアクチュエータの少なくともいずれかに分配され、
前記複数の補償タイプそれぞれの前記補償量の補償を行うことは、前記マクロアクチュエータ及び前記ミニアクチュエータの少なくともいずれかにより前記第6補償タイプの補償量の補償を行うことを含む、
請求項1に記載の制御装置。
【請求項8】
前記マクロアクチュエータは、流体圧アクチュエータであり、
前記ミニアクチュエータは、電磁アクチュエータである、
請求項1に記載の制御装置。
【請求項9】
前記ハイブリッドアクチュエータは、ユーザの身体動作をアシストするように構成されたアシストロボットを駆動するために使用され、
前記複数の補償タイプは、
前記アシストロボットの重力を補償する第1補償タイプ、
前記アシストロボットの慣性を補償する第3補償タイプ、
前記アシストロボットで生じる摩擦力を補償する第5補償タイプ、及び
前記ハイブリッドアクチュエータで生じる摩擦力を補償する第6補償タイプ、
の少なくともいずれかを含む、
請求項1に記載の制御装置。
【請求項10】
前記ハイブリッドアクチュエータは、ユーザの身体動作をアシストするように構成されたアシストロボットを駆動するために使用され、
前記ハイブリッドアクチュエータは、可動子及び固定子を含み、
前記固定子は、前記可動子の駆動により動くように構成され、
前記複数の補償タイプは、
前記ハイブリッドアクチュエータの重力を補償する第2補償タイプ、及び
前記ハイブリッドアクチュエータの慣性を補償する第4補償タイプ、
の少なくともいずれかを含む、
請求項1に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、制御方法、及び制御プログラムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
複数の駆動源を備えるハイブリッドアクチュエータが存在する。例えば、非特許文献1では、マクロアクチュエータ及びミニアクチュエータを備えるハイブリッドアクチュエータの制御方法が提案されている。マクロアクチュエータは、例えば、空気圧人工筋であり、ミニアクチュエータは、例えば、直流モータである。非特許文献1で提案されている制御方法では、コントローラは、目標出力(非特許文献1では、トルク)をマクロアクチュエータに与えて、マクロアクチュエータを駆動する。コントローラは、これにより得られるマクロアクチュエータの出力及び目標出力の偏差を算出し、算出される偏差をミニアクチュエータに与える。これにより、コントローラは、ミニアクチュエータをフィードバック制御することで、マクロアクチュエータの出力及び目標出力の偏差を補償する(非特許文献1のFig.4)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2017/138634号
国際公開第2017/138651号
【非特許文献】
【0004】
I. Sardellitti, et al. "Air Muscle Controller Design in the Distributed Macro-Mini (DM2) Actuation Approach", [online], [令和6年4月23日検索], インターネット<URL:https://hcr.cau.ac.kr/pages/paper/air.pdf>
【発明の概要】
【発明が解決しようとする課題】
【0005】
マクロアクチュエータは、高出力及び低周波数で駆動するように構成されるのに対して、ミニアクチュエータは、低出力及び高周波数で駆動するように構成される。周波数が低いことは、応答性が低いことに相当する。非特許文献1で提案される制御方法では、応答性の低いマクロアクチュエータの出力を応答性の高いミニアクチュエータで補助することで、目標出力に対するハイブリッドアクチュエータの応答性を高めることができる。しかしながら、本件発明者は、この従来の制御方法には、次のような問題点があることを見出した。
【0006】
すなわち、フィードフォワードで複数の補償を行う場合に、上記制御方法では、目標出力は、マクロアクチュエータ及びミニアクチュエータの両方に入力される。そのため、全ての補償の指令も、マクロアクチュエータ及びミニアクチュエータの両方に与えられる。これにより、高周波数の補償の指令がマクロアクチュエータに与えられると、アクチュエータは、局所的に大きな駆動力を出力してしまう可能性がある。また、高出力の補償の指令がミニアクチュエータに与えられると、出力不足に陥ってしまう可能性がある。したがって、従来の制御方法では、フィードフォワードで複数の補償を行おうとすると、ハイブリッドアクチュエータの動作が不安定になってしまう可能性がある。
【0007】
本開示は、一側面では、このような点を考慮してなされたものであり、その目的は、フィードフォワードで複数の補償を行う際におけるハイブリッドアクチュエータの動作の安定化を図るための技術を提供することである。
【課題を解決するための手段】
【0008】
本開示は、上述した課題を解決するために、以下の構成を採用する。なお、以下の発明の構成は適宜組み合わせ可能である。
【0009】
本開示の一側面に係る制御装置は、制御部を備える。制御部は、目標出力を決定すること、決定された前記目標出力に対して、複数の補償タイプそれぞれの補償量を決定すること、並びに前記複数の補償タイプそれぞれの決定された前記補償量の補償をフィードフォワードで行いながら、決定された前記目標出力に応じて、マクロアクチュエータ及びミニアクチュエータを備えるハイブリッドアクチュエータの動作を制御することを実行するように構成される。前記マクロアクチュエータ及び前記ミニアクチュエータに対する前記複数の補償タイプの分配が決定されている。これに応じて、前記複数の補償タイプそれぞれの前記補償量の補償を行うことは、決定された前記分配に従って、前記マクロアクチュエータ及び前記ミニアクチュエータの少なくとも一方により、前記複数の補償タイプそれぞれの前記補償量の補償を行うことにより構成される。
【0010】
当該構成では、各補償タイプの補償の指令は、マクロアクチュエータ及びミニアクチュエータの少なくとも一方に分配される。各補償タイプの分配は、予め決定されていてもよいし、動的に決定されてもよい。この分配の決定では、各補償タイプの補償をマクロアクチュエータのみで行うこと、ミニアクチュエータのみで行うこと又はマクロアクチュエータ及びミニアクチュエータの両方で行うことのいずれかを選択することができる。これにより、例えば、高出力及び低周波数の補償をマクロアクチュエータに分配する、低出力及び高周波数の補償をミニアクチュエータに分配する、1以上の補償を低周波数成分及び高周波数成分に分割し、低周波数成分をマクロアクチュエータに分配し、高周波数成分をミニアクチュエータに分配する等のように補償動作を最適化する余地を生み出すことができる。すなわち、最適な分配による動作の安定性の向上を実現する機会を得ることができる。したがって、当該構成によれば、フィードフォワードで複数の補償を行う際におけるハイブリッドアクチュエータの動作の安定化を図ることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
3か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
1か月前
ローム株式会社
基準電圧源
2か月前
株式会社熊谷組
障害物の検出方法
1か月前
愛知製鋼株式会社
車両用システム
2か月前
個人
作業車両自動化システム
3か月前
株式会社クボタ
作業車
25日前
新電元工業株式会社
作業用ロボット
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
豊田合成株式会社
機器制御装置
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
3か月前
株式会社アサヒエンタープライズ
調整弁
12日前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
生産管理システム
3か月前
トヨタ自動車株式会社
移動制御システム
3か月前
トヨタ自動車株式会社
減圧弁
3か月前
株式会社ダイフク
物品搬送設備
2か月前
キヤノン株式会社
配送システム
2か月前
トヨタ自動車株式会社
クラッチペダル
3か月前
トヨタ自動車株式会社
制御装置
1か月前
エイブリック株式会社
電流補償回路及び半導体装置
1か月前
株式会社ダイフク
物品搬送設備
26日前
株式会社ダイフク
物品搬送設備
4日前
カヤバ株式会社
減圧弁
1か月前
株式会社CAOS
移動体の制御システム
2か月前
村田機械株式会社
搬送車システム
1か月前
株式会社アマダ
工作機械制御装置
1か月前
日野自動車株式会社
自動運転装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
3か月前
愛知製鋼株式会社
マーカシステム及び制御方法
2か月前
アズビル株式会社
制御システムおよび制御方法
3か月前
アズビル株式会社
制御システムおよび制御方法
3か月前
キヤノン電子株式会社
加工システム、及び、加工装置
3か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ