TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025163494
公報種別
公開特許公報(A)
公開日
2025-10-29
出願番号
2024066798
出願日
2024-04-17
発明の名称
車体姿勢制御方法及び車体姿勢制御装置
出願人
日産自動車株式会社
代理人
弁理士法人とこしえ特許事務所
主分類
B60W
10/00 20060101AFI20251022BHJP(車両一般)
要約
【課題】車両の加減速によって生じる乗員の挙動を抑えることができる車体姿勢制御方法及び車体姿勢制御装置を提供することである。
【解決手段】車両の加速度を取得し、加速度から推定した車両の乗員の慣性加速度と、重力加速度と、を合成した合成加速度の方向に対して車両の車体が垂直になるように、車両前後のモータ及び/又はアクティブサスペンションによって車体の姿勢を制御する。
【選択図】 図1
特許請求の範囲
【請求項1】
コントローラによって実行される車体姿勢制御方法であって、
前記コントローラは、
車両の加速度を取得し、
前記加速度から推定した前記車両の乗員の慣性加速度と、重力加速度と、を合成した合成加速度の方向に対して前記車両の車体が垂直になるように、前記車両前後のモータ及び/又はアクティブサスペンションによって前記車体の姿勢を制御する車体姿勢制御方法。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の車体姿勢制御方法であって、
前記コントローラは、
前記車両が加減速を開始してから前記車両が加減速を終了するまでの間、前記合成加速度を前記乗員に通知する車体姿勢制御方法。
【請求項3】
請求項1又は2に記載の車体姿勢制御方法であって、
前記コントローラは、
前記車両が加速する場合には、前輪モータの駆動力が後輪モータの駆動力よりも大きくなるように前記前輪モータの駆動力及び前記後輪モータの駆動力を設定し、
前記車両が減速する場合には、前輪モータの駆動力が後輪モータの駆動力よりも小さくなるように前記前輪モータの駆動力及び前記後輪モータの駆動力を設定し、
設定した前記前輪モータの駆動力及び前記後輪モータの駆動力に応じて前記前輪モータ及び前記後輪モータを制御することによって、前記車体の姿勢を制御する車体姿勢制御方法。
【請求項4】
請求項1又は2に記載の車体姿勢制御方法であって、
前記コントローラは、
前記車両が加速する場合には、前記アクティブサスペンションの前側アクチュエータの制御圧力が前記アクティブサスペンションの後側アクチュエータの制御圧力よりも小さくなるように前記前側アクチュエータの制御圧力及び前記後側アクチュエータの制御圧力を設定し、
前記車両が減速する場合には、前記前側アクチュエータの制御圧力が前記後側アクチュエータの制御圧力よりも大きくなるように前記前側アクチュエータの制御圧力及び前記後側アクチュエータの制御圧力を設定し、
設定した前記前側アクチュエータの制御圧力及び前記後側アクチュエータの制御圧力に応じて前記アクティブサスペンションを制御することによって、前記車体の姿勢を制御する車体姿勢制御方法。
【請求項5】
請求項1又は2に記載の車体姿勢制御方法であって、
前記コントローラは、
前記合成加速度を演算してから所定時間経過後に、前記合成加速度の方向に対して前記車体が垂直になるように前記車体の姿勢を制御する車体姿勢制御方法。
【請求項6】
請求項1又は2に記載の車体姿勢制御方法であって、
前記コントローラは、
前記車両が走行する道路が渋滞している場合には、前記合成加速度の方向に対して前記車体が垂直になるように前記車体の姿勢を制御することを禁止し、
前記車両が走行する道路が渋滞していない場合に、前記合成加速度の方向に対して前記車体が垂直になるように前記車体の姿勢を制御する車体姿勢制御方法。
【請求項7】
請求項1又は2に記載の車体姿勢制御方法であって、
前記コントローラは、
前記車両の加減速が所定閾値以下である場合には、前記合成加速度の方向に対して前記車体が垂直になるように前記車体の姿勢を制御することを禁止し、
前記加減速が前記所定閾値よりも大きい場合には、前記合成加速度の方向に対して前記車体が垂直になるように前記車体の姿勢を制御する車体姿勢制御方法。
【請求項8】
コントローラを備える車体姿勢制御装置であって、
前記コントローラは、
車両の加速度を取得し、
前記加速度から推定した前記車両の乗員の慣性加速度と、重力加速度と、を合成した合成加速度の方向に対して前記車両の車体が垂直になるように、前記車両前後のモータ及び/又はアクティブサスペンションによって前記車体の姿勢を制御する車体姿勢制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車体姿勢制御方法及び車体姿勢制御装置に関するものである。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
車台と車体との間に流体圧バネ手段を備えた自動車の車体角度の制御装置に、流体圧バネ手段の流体圧を加減する制御弁を備え、重力方向が車体の床面と垂直になるように制御弁を開閉制御する技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特許第2934371号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に係る技術は、車体角度を制御して車体を水平に保つ技術であるが、車両の加減速によって生じる乗員の挙動を抑えることができないという問題がある。
【0005】
本発明が解決しようとする課題は、車両の加減速によって生じる乗員の挙動を抑えることができる車体姿勢制御方法及び車体姿勢制御装置を提供することである。
【課題を解決するための手段】
【0006】
本発明は、車両の乗員の慣性加速度と、重力加速度と、を合成した合成加速度の方向に対して車両の車体が垂直になるように、車両前後のモータ及び/又はアクティブサスペンションによって車体の姿勢を制御することによって上記課題を解決する。
【発明の効果】
【0007】
本発明によれば、車両の加減速によって生じる乗員の挙動を抑えることができる。
【図面の簡単な説明】
【0008】
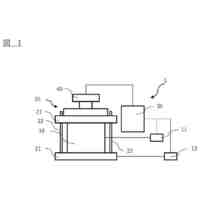
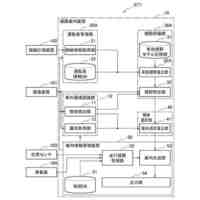
図1は、本実施形態に係る車体姿勢制御装置の構成を示すブロック図である。
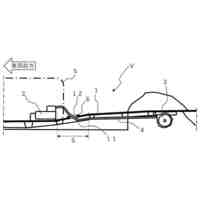
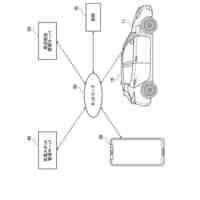
図2は、本実施形態に係る車体姿勢制御の一例を説明するための図である。
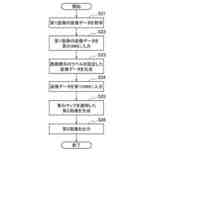
図3は、本実施形態に係る車体姿勢制御装置によって実行される車体姿勢制御方法のフローチャートの一例を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態に係る車体姿勢制御装置及び車体姿勢制御方法を図面に基づいて説明する。
【0010】
図1を用いて、本発明の実施形態に係る車体姿勢制御装置について説明する。図1は、本実施形態に係る車体姿勢制御装置の構成を示すブロック図である。車両2は、車体姿勢制御装置10と、車載センサ20と、前輪モータ30と、後輪モータ40と、アクティブサスペンション50と、出力装置60とを備える。これらの装置は、CAN通信その他の車載LANにより接続され、相互に情報の送受信を行うことができる。前輪モータ30及び後輪モータ40は、特許請求の範囲に記載の「前後のモータ」の一例である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日産自動車株式会社
電動車両
17日前
日産自動車株式会社
保持機構
1か月前
日産自動車株式会社
電子機器
1日前
日産自動車株式会社
保持機構
29日前
日産自動車株式会社
二次電池
28日前
日産自動車株式会社
二次電池
25日前
日産自動車株式会社
内燃機関
14日前
日産自動車株式会社
積層型電池
1か月前
日産自動車株式会社
面圧付与機構
1か月前
日産自動車株式会社
面圧付与機構
1か月前
日産自動車株式会社
電池モジュール
15日前
日産自動車株式会社
ロータシャフト
9日前
日産自動車株式会社
電池モジュール
22日前
日産自動車株式会社
ロータシャフト
9日前
日産自動車株式会社
リチウム二次電池
14日前
日産自動車株式会社
車両用排気部構造
14日前
日産自動車株式会社
リチウム二次電池
28日前
日産自動車株式会社
塗装方法及び自動車
16日前
日産自動車株式会社
エアレスタイヤ構造
1日前
日産自動車株式会社
エンジンのアンダカバー
22日前
日産自動車株式会社
ギヤ装置のブリーザ構造
1か月前
株式会社ニフコ
締結構造
22日前
日産自動車株式会社
車両用荷室における排熱構造
25日前
日産自動車株式会社
相乗り可否判定方法及び装置
25日前
日産自動車株式会社
運転支援方法及び運転支援装置
22日前
日産自動車株式会社
画像表示方法及び画像表示装置
1か月前
日産自動車株式会社
車載機能制御方法及び車載端末
1か月前
日産自動車株式会社
経路案内方法及び経路案内装置
1か月前
日産自動車株式会社
画像処理方法及び画像処理装置
1か月前
日産自動車株式会社
運転支援方法及び運転支援装置
23日前
日産自動車株式会社
配車管理装置及び配車管理方法
1か月前
日産自動車株式会社
車両制御装置及び車両制御方法
1か月前
日産自動車株式会社
施錠制御方法及び施錠制御装置
24日前
日産自動車株式会社
情報提供方法及び情報提供装置
1日前
日産自動車株式会社
車両制御方法および車両制御装置
23日前
日産自動車株式会社
固体酸化物形燃料電池の製造方法
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ