TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025159550
公報種別
公開特許公報(A)
公開日
2025-10-21
出願番号
2024062201
出願日
2024-04-08
発明の名称
ロボットシステム、ロボット制御装置、ロボット制御方法、およびプログラム
出願人
TOPPANホールディングス株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/242 20240101AFI20251014BHJP(制御;調整)
要約
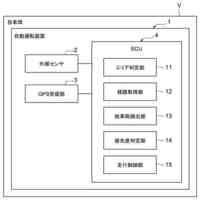
【課題】ロボットに自己位置を把握させられるロボットシステムを提供する。
【解決手段】誘導ラインを検出するための光を出射する発光部と、発光部が出射した光の反射光を受光する受光部と、受光部の受光結果から誘導ラインを検出し、誘導ラインに沿って走行するようにロボットの走行を制御する走行制御部と、特定の位置と予め対応付けられた特定のパターンを、受光部の受光結果から検出した場合、特定の位置に基づき、ロボットの位置を検出する位置検出部とを備えるロボットシステムである。
【選択図】図1
特許請求の範囲
【請求項1】
誘導ラインを検出するための光を出射する発光部と、
前記発光部が出射した光の反射光を受光する受光部と、
前記受光部の受光結果から前記誘導ラインを検出し、前記誘導ラインに沿って走行するようにロボットの走行を制御する走行制御部と、
特定の位置と予め対応付けられた特定のパターンを、前記受光部の受光結果から検出した場合、前記特定の位置に基づき、前記ロボットの位置を検出する位置検出部と
を備えるロボットシステム。
続きを表示(約 1,200 文字)
【請求項2】
前記特定のパターンは、輝度変化のパターンである、請求項1に記載のロボットシステム。
【請求項3】
前記特定のパターンは、距離変化のパターンである、請求項1に記載のロボットシステム。
【請求項4】
前記距離変化のパターンを生成するための凹凸構造が、前記発光部が出射する光を透過する物質で覆われている、請求項3に記載のロボットシステム。
【請求項5】
前記特定のパターンは、前記誘導ラインに対して垂直な方向のパターンである、
請求項1から請求項4のいずれかの項に記載のロボットシステム。
【請求項6】
前記走行制御部は、前記ロボットの位置を、オドメトリ、およびLiDAR(Light Detection And Ranging) SLAM(Simultaneous Localization and Mapping)により推定する場合と、前記位置検出部により検出する場合とを切り換える、
請求項1に記載のロボットシステム。
【請求項7】
誘導ラインを検出するための光を出射する発光部と、前記発光部が出射した光の反射光を受光する受光部とを備えるロボットを制御するロボット制御装置であって、
前記受光部の受光結果から前記誘導ラインを検出し、前記誘導ラインに沿って走行するようにロボットの走行を制御する走行制御部と、
特定の位置と予め対応付けられた特定のパターンを、前記受光部の受光結果から検出した場合、前記特定の位置に基づき、前記ロボットの位置を検出する位置検出部と
を備えるロボット制御装置。
【請求項8】
誘導ラインを検出するための光を出射する第1のステップと、
前記第1のステップにおいて出射した光の反射光を受光する第2のステップと、
前記第2のステップの受光結果から前記誘導ラインを検出し、前記誘導ラインに沿って走行するようにロボットの走行を制御する第3のステップと、
特定の位置と予め対応付けられた特定のパターンを、前記第2のステップの受光結果から検出した場合、前記特定の位置に基づき、前記ロボットの位置を検出する第4のステップと
を有するロボット制御方法。
【請求項9】
誘導ラインを検出するための光を出射する発光部と、前記発光部が出射した光の反射光を受光する受光部とを備えるロボットを制御するロボット制御装置のコンピュータを、
前記受光部の受光結果から前記誘導ラインを検出し、前記誘導ラインに沿って走行するようにロボットの走行を制御する走行制御部、
特定の位置と予め対応付けられた特定のパターンを、前記受光部の受光結果から検出した場合、前記特定の位置に基づき、前記ロボットの位置を検出する位置検出部
として機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステム、ロボット制御装置、ロボット制御方法、およびプログラムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来、自己位置を推定しながら自律的に移動可能なロボットがある。自己位置の推定方法としては、ライダ(LiDAR、Light Detection And Ranging)などを用いて周囲のマップ(環境地図)の作成と自己位置の推定を同時に行うSLAM(Simultaneous Localization and Mapping)、走行用の車輪などの回転数から移動量を推定し、移動量を積算することで自己位置を推定するオドメトリ(Odometry)、これらの組み合わせなどの方法が知られている。
【0003】
また、床面に引かれた誘導ラインを検出し、該誘導ラインに沿って移動するライントレース技術を用いるロボットもある(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0004】
特開2023-143029号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、誘導ラインを検出し、該誘導ラインに沿って移動するロボットにおいては、ロボットの自己位置が把握できないという問題がある。
【0006】
本発明は、このような事情に鑑みてなされたもので、ロボットに自己位置を把握させられるロボットシステム、ロボット制御装置、ロボット制御方法、およびプログラムを提供する。
【課題を解決するための手段】
【0007】
この発明は上述した課題を解決するためになされたもので、本発明の一態様は、誘導ラインを検出するための光を出射する発光部と、前記発光部が出射した光の反射光を受光する受光部と、前記受光部の受光結果から前記誘導ラインを検出し、前記誘導ラインに沿って走行するようにロボットの走行を制御する走行制御部と、特定の位置と予め対応付けられた特定のパターンを、前記受光部の受光結果から検出した場合、前記特定の位置に基づき、前記ロボットの位置を検出する位置検出部とを備えるロボットシステムである。
【0008】
また、本発明の他の一態様は、上述したロボットシステムであって、前記特定のパターンは、輝度変化のパターンである。
【0009】
また、本発明の他の一態様は、上述したロボットシステムであって、前記特定のパターンは、距離変化のパターンである。
【0010】
また、本発明の他の一態様は、上述したロボットシステムであって、前記距離変化のパターンを生成するための凹凸構造が、前記発光部が出射する光を透過する物質で覆われている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
25日前
株式会社熊谷組
障害物の検出方法
16日前
愛知製鋼株式会社
車両用システム
1か月前
ローム株式会社
基準電圧源
1か月前
新電元工業株式会社
作業用ロボット
14日前
個人
作業車両自動化システム
2か月前
豊田合成株式会社
機器制御装置
21日前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
トヨタ自動車株式会社
移動制御システム
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
生産管理システム
2か月前
トヨタ自動車株式会社
減圧弁
2か月前
マーク ヘイリー
消防ロボット
3か月前
エイブリック株式会社
電流補償回路及び半導体装置
10日前
トヨタ自動車株式会社
クラッチペダル
2か月前
キヤノン株式会社
配送システム
1か月前
トヨタ自動車株式会社
制御装置
25日前
株式会社ダイフク
物品搬送設備
1か月前
カヤバ株式会社
減圧弁
23日前
村田機械株式会社
搬送車システム
15日前
株式会社アマダ
工作機械制御装置
15日前
アズビル株式会社
制御システムおよび制御方法
2か月前
株式会社CAOS
移動体の制御システム
1か月前
日野自動車株式会社
自動運転装置
15日前
株式会社テイエルブイ
減圧弁の制御装置
3か月前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
2か月前
愛知製鋼株式会社
マーカシステム及び制御方法
1か月前
株式会社TMEIC
安全性診断装置
29日前
キヤノン電子株式会社
加工システム、及び、加工装置
2か月前
アズビル株式会社
制御システムおよび制御方法
2か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ