TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025146285
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024046971
出願日
2024-03-22
発明の名称
作業機械の経路生成装置及び作業機械
出願人
日立建機株式会社
代理人
弁理士法人平木国際特許事務所
主分類
E02F
9/20 20060101AFI20250926BHJP(水工;基礎;土砂の移送)
要約
【課題】掘削経路を生成して掘削動作を開始した後においても、掘削途中の地形変化に応じて掘削経路を最適化することが可能な作業機械の経路生成装置及び作業機械を提供する。
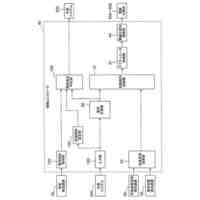
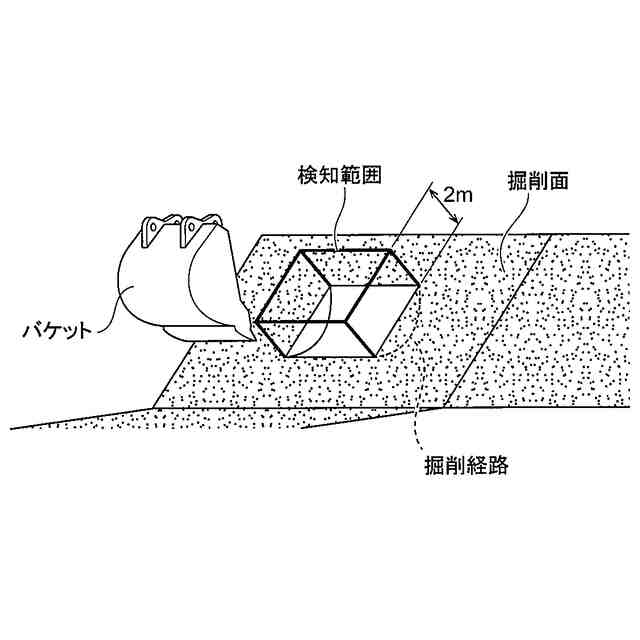
【解決手段】掘削を開始する前および掘削中に撮像装置12にて車体前方の掘削量に影響を及ぼす可能性のある体積の大きい岩等を検知する(重量物検知部23)。地形情報を測定し、目的の掘削量を掘削可能な掘削経路を生成する(経路生成部21)。掘削経路を基に掘削対象領域の掘削面から垂直に任意の高さの掘削影響領域として検知範囲を定義する(検知範囲生成部22)。生成された掘削経路に沿って掘削している最中に、定義した検知範囲に検知している一定体積以上の岩等が侵入および排出されたことを検知したときに(重量物検知部23)、掘削量が目的値となるように掘削経路を再生成することで(体積変化検知部24→経路生成部21)、掘削量を安定させる。
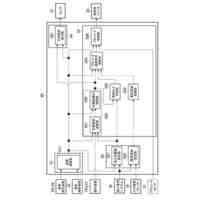
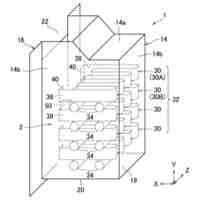
【選択図】図2
特許請求の範囲
【請求項1】
掘削作業を行う作業装置を備える作業機械の経路生成装置であって、
前記作業機械の掘削対象領域の3次元形状情報と前記作業装置の姿勢情報及び寸法情報に基づいて、前記掘削対象領域の対象物を目標掘削体積だけ掘削するために前記作業装置を移動させる掘削経路を生成する経路生成部と、
前記掘削経路に沿って前記作業装置が移動するように制御するための操作量を生成する操作量生成部と、
前記掘削対象領域の3次元形状情報に基づいて、前記掘削経路に沿って前記作業装置を移動させて掘削しているときに、前記掘削対象領域に存在する所定の体積以上の重量物の変位を検知する重量物検知部と、
前記掘削経路に基づいて前記経路生成部で推定する前記対象物の推定掘削体積において、前記重量物の変位によって生じる体積変化を検知したときに、前記経路生成部に送信する前記掘削経路の再生成信号を生成する体積変化検知部と、を備え、
前記経路生成部は、前記体積変化検知部から前記掘削経路の前記再生成信号を受信したときに、前記重量物の変位によって生じる前記体積変化に基づいて、前記掘削経路を再生成することを特徴とする作業機械の経路生成装置。
続きを表示(約 650 文字)
【請求項2】
請求項1に記載の作業機械の経路生成装置において、
前記掘削経路と前記掘削対象領域の3次元形状情報と前記作業装置の姿勢情報及び寸法情報に基づいて、前記重量物が入る又は出ることで、前記推定掘削体積に影響を及ぼす検知範囲を生成する検知範囲生成部を備え、
前記重量物検知部は、前記検知範囲に前記重量物が入る又は出ることを検知し、
前記体積変化検知部は、前記推定掘削体積において、前記検知範囲に前記重量物が入る又は出ることで生じる体積変化を検知することを特徴とする作業機械の経路生成装置。
【請求項3】
請求項2に記載の作業機械の経路生成装置において、
前記検知範囲生成部は、前記掘削経路に対して前記掘削対象領域の掘削面の鉛直方向に所定の寸法だけ延長した範囲を前記検知範囲と設定することを特徴とする作業機械の経路生成装置。
【請求項4】
請求項1に記載の作業機械の経路生成装置において、
前記体積変化検知部は、前記推定掘削体積が前記目標掘削体積から所定の許容体積を超えて乖離したときに、前記掘削経路の前記再生成信号の生成が必要な体積変化とすることを特徴とする作業機械の経路生成装置。
【請求項5】
請求項1に記載の作業機械の経路生成装置と、
前記操作量生成部によって生成された前記操作量に基づいて、前記掘削経路に沿った前記作業装置の動作を自動制御する車体制御装置と、を備える作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、掘削作業を行う作業装置を備える作業機械の経路生成装置、及び、作業機械に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
油圧ショベルに代表される掘削機械は、例えば道路や建物の建設、鉱物資源の採掘などの目的で使用される。その中でも、地山又は地面等を掘削する資源採掘で使用される場合、計画通りの採掘量となるように掘削作業を行うことが重要である。例えば、ダンプトラックへの資源の過積載による積み直し作業の発生、過少積載による資源採掘量の低下などの計画外の作業や事象は、採掘量の低下の一因となる。
【0003】
従来から、適切な量の資源を安定して掘削するための種々の技術が開発されている。例えば、特許文献1には、撮像した地形情報から目標体積分を掘削するための掘削開始位置の決定方法および掘削軌跡の生成方法が記載されている。特許文献2には、任意の掘削深さ、掘削軌跡の曲率で自動掘削を実施するシステムが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2020-118017号公報
特開2020-041354号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1、2には、掘削前に地形情報を測定して掘削開始位置および掘削経路を生成した場合の掘削途中の地形変化に対応することについては、開示されていない。
【0006】
特に、採掘経路の周辺に岩等の体積の大きい物がある場合、掘削途中の地形変化によって当該岩の位置が変化する可能性が高い。そして、例えば当該掘削前に生成した掘削経路の範囲内に岩が入ってきた場合、掘削量が過大となり得る。また、例えば掘削経路の範囲内に存在していた岩が当該範囲から出た場合、掘削量は過少となり得る。このように、掘削途中における地形の状況変化は、資源の採掘作業を行う際には採掘量に大きな影響を及ぼすと考えられる。
【0007】
本発明は、このような点に着目してなされたものであり、掘削経路を生成して掘削動作を開始した後においても、掘削途中の地形変化に応じて掘削経路を最適化することが可能な作業機械の経路生成装置及び作業機械を提供することを目的としている。
【課題を解決するための手段】
【0008】
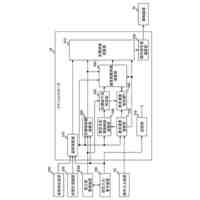
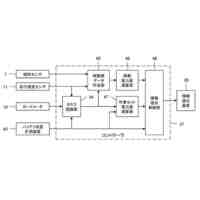
上記課題を解決するため、本発明の作業機械の経路生成装置は、掘削作業を行う作業装置を備える作業機械の経路生成装置であって、前記作業機械の掘削対象領域の3次元形状情報と前記作業装置の姿勢情報及び寸法情報に基づいて、前記掘削対象領域の対象物を目標掘削体積だけ掘削するために前記作業装置を移動させる掘削経路を生成する経路生成部と、前記掘削経路に沿って前記作業装置が移動するように制御するための操作量を生成する操作量生成部と、前記掘削対象領域の3次元形状情報に基づいて、前記掘削経路に沿って前記作業装置を移動させて掘削しているときに、前記掘削対象領域に存在する所定の体積以上の重量物の変位を検知する重量物検知部と、前記掘削経路に基づいて前記経路生成部で推定する前記対象物の推定掘削体積において、前記重量物の変位によって生じる体積変化を検知したときに、前記経路生成部に送信する前記掘削経路の再生成信号を生成する体積変化検知部と、を備え、前記経路生成部は、前記体積変化検知部から前記掘削経路の前記再生成信号を受信したときに、前記重量物の変位によって生じる前記体積変化に基づいて、前記掘削経路を再生成することを特徴とする。
【発明の効果】
【0009】
本発明によれば、掘削経路を生成して掘削動作を開始した後においても、掘削途中の地形変化に応じて掘削経路を最適化することができる。そのため、例えば、過少積載を防止することで、計画通りの安定した掘削量を提供することができる。また、ダンプトラック等への過積載を防止することで、積み直しの時間を削減することができる。
【図面の簡単な説明】
【0010】
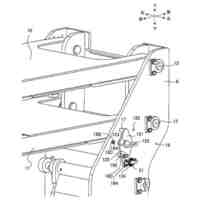
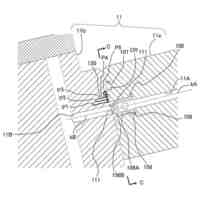
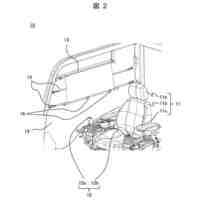
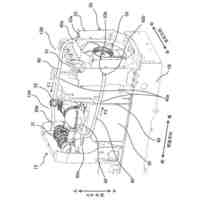
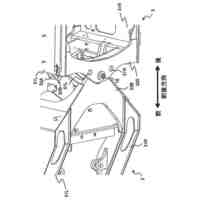
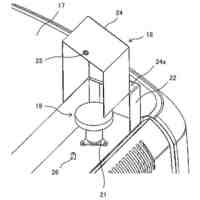
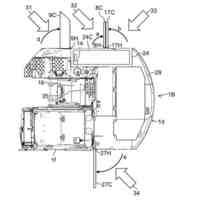
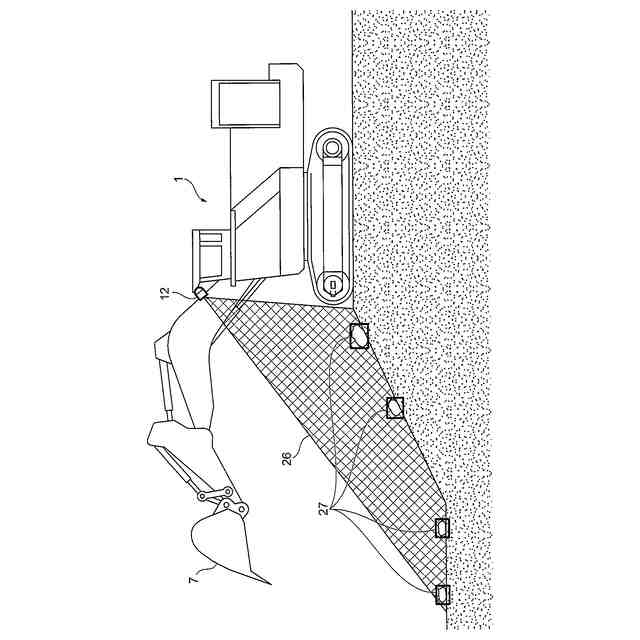
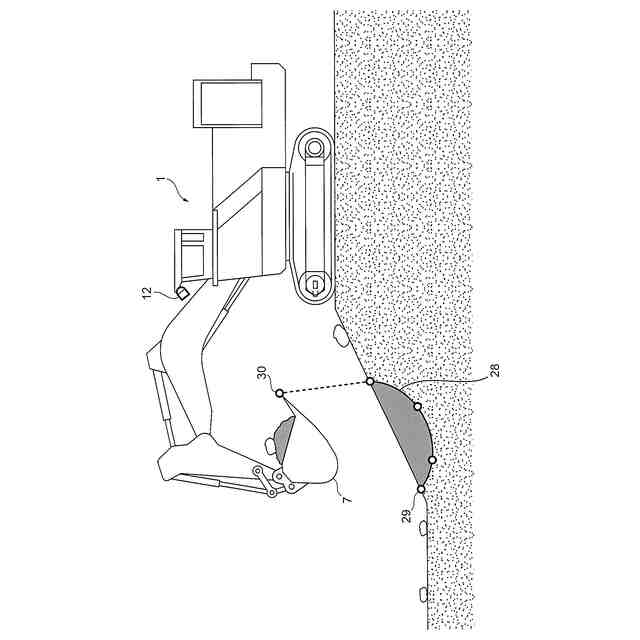
本発明の実施形態に係る掘削機械の側面図である。
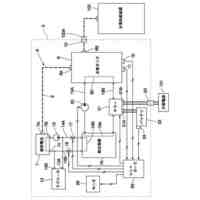
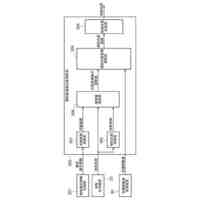
本発明の実施形態に係る経路生成装置のブロック図である。
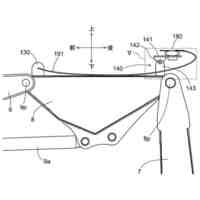
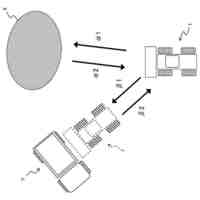
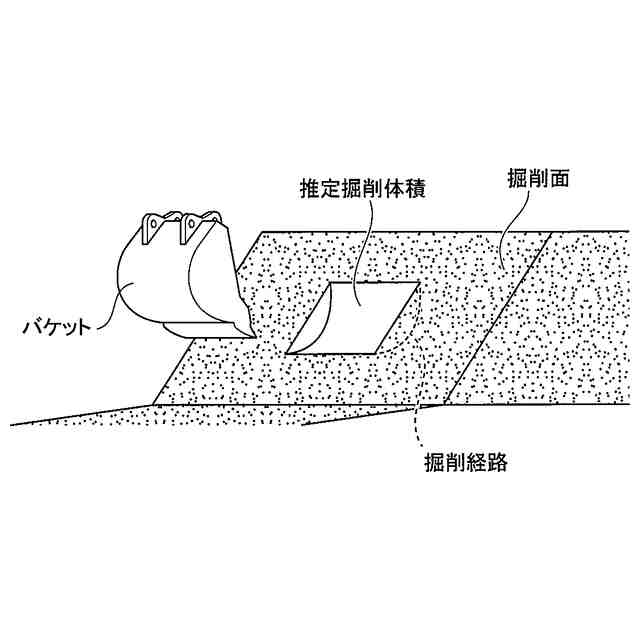
推定掘削体積を模式的に表示した斜視図である。
検知範囲を模式的に表示した斜視図である。
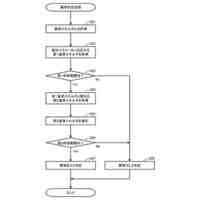
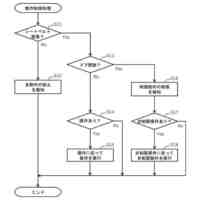
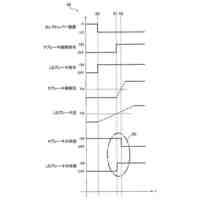
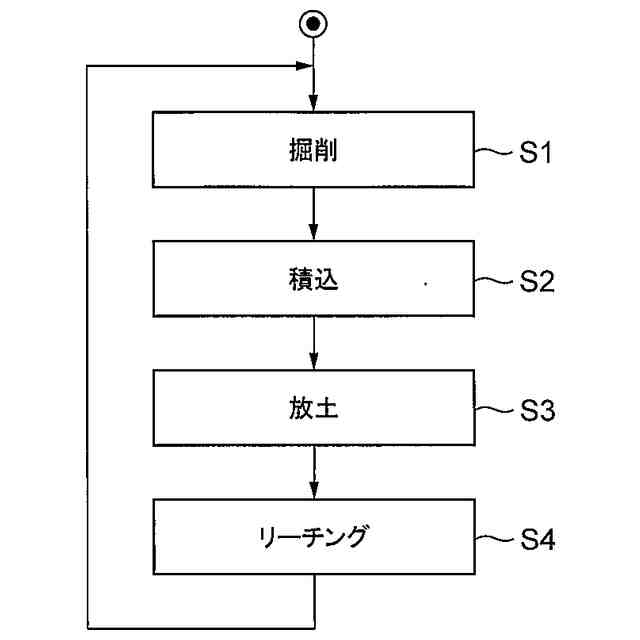
本発明の実施形態に係る掘削機械の動作フローを示すフローチャートである。
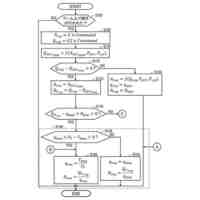
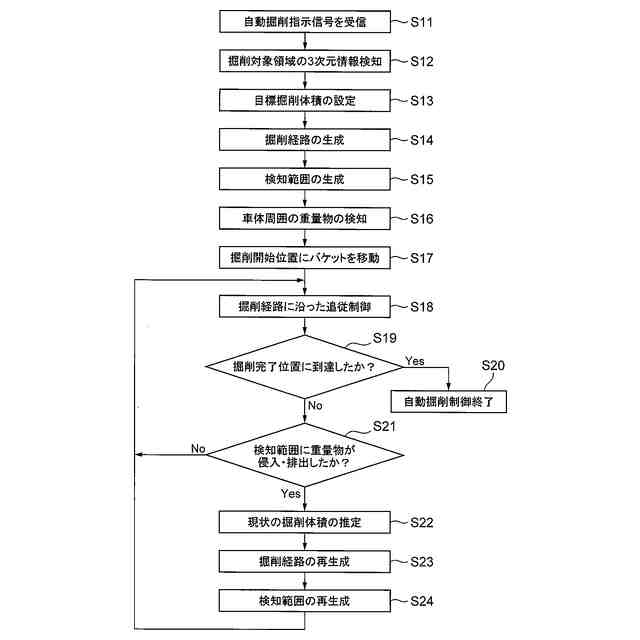
本発明の実施形態に係る掘削機械の掘削フロー(自動掘削制御方法)を示すフローチャートである。
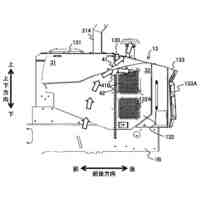
図6におけるステップS12時の掘削機械の姿勢を模式的に表示した図である。
図6におけるステップS16時の掘削機械の姿勢を模式的に表示した図である。
図6におけるステップS20時の掘削機械の姿勢を模式的に表示した図である。
図6におけるステップS21時の掘削機械の姿勢を模式的に表示した図である。
図6におけるステップS24時(検知範囲内に重量物が入った時)の掘削機械の姿勢を模式的に表示した図である。
図6におけるステップS24時(検知範囲内から重量物が出た時)の掘削機械の姿勢を模式的に表示した図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
建設機械
2日前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
6日前
日立建機株式会社
作業機械
10日前
日立建機株式会社
油圧機器
2日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
2か月前
日立建機株式会社
作業機械
3日前
日立建機株式会社
建設機械
2か月前
日立建機株式会社
建設機械
2か月前
日立建機株式会社
作業機械
2か月前
日立建機株式会社
作業機械
3か月前
日立建機株式会社
建設機械
3か月前
日立建機株式会社
作業機械
3か月前
日立建機株式会社
作業車両
3か月前
日立建機株式会社
作業機械
6日前
日立建機株式会社
作業車両
3か月前
日立建機株式会社
作業機械
3日前
日立建機株式会社
建設機械
2日前
日立建機株式会社
建設機械
2日前
日立建機株式会社
作業車両
2日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
動力伝達装置
2日前
日立建機株式会社
電子機器装置
2か月前
日立建機株式会社
液冷式抵抗器
2日前
日立建機株式会社
情報処理装置
2か月前
日立建機株式会社
油圧システム
6日前
日立建機株式会社
ダンプトラック
2か月前
日立建機株式会社
電動式建設機械
2か月前
日立建機株式会社
電動式作業機械
2日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ