TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025144783
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024044628
出願日
2024-03-21
発明の名称
ロボットハンドおよびロボット
出願人
日本碍子株式会社
,
エヌジーケイ・キルンテック株式会社
代理人
弁理士法人 快友国際特許事務所
主分類
F27D
3/00 20060101AFI20250926BHJP(炉,キルン,窯;レトルト)
要約
【課題】ロボットハンドが匣鉢を把持しているときに匣鉢ががたつくことを抑制することができる技術を開示する。
【解決手段】ロボットハンドは、熱処理炉から搬出された匣鉢を把持する。ロボットハンドは、左右方向に前記匣鉢を把持可能な一対の把持部材と、前記一対の把持部材が前記匣鉢を把持しているときに前記匣鉢よりも上側または下側に配置される第1爪と、前記一対の把持部材に把持される前記匣鉢を前記第1爪に押し付ける第1押付部材と、を備えている。
【選択図】図14
特許請求の範囲
【請求項1】
熱処理炉から搬出された匣鉢を把持するロボットハンドであって、
左右方向に前記匣鉢を把持可能な一対の把持部材と、
前記一対の把持部材が前記匣鉢を把持しているときに前記匣鉢よりも上側または下側に配置される第1爪と、
前記一対の把持部材に把持される前記匣鉢を前記第1爪に押し付ける第1押付部材と、を備えている、ロボットハンド。
続きを表示(約 1,200 文字)
【請求項2】
前記第1爪に対して、前記左右方向に対して直交する上下方向に間隔を空けて配置される第2爪をさらに備えており、
前記一対の把持部材が前記匣鉢を把持しているときに、前記第1爪と前記第2爪との間に前記匣鉢が配置される、請求項1に記載のロボットハンド。
【請求項3】
前記第1爪は、前記匣鉢よりも上側に配置されており、
前記第2爪は、前記匣鉢よりも下側に配置されており、
前記第1押付部材により前記匣鉢が前記第1爪に押し付けられていると、前記第2爪と前記匣鉢との間にクリアランスが形成され、
前記第2爪が前記匣鉢と当接していると、前記第1爪と前記匣鉢との間にクリアランスが形成される、請求項2に記載のロボットハンド。
【請求項4】
前記第1押付部材に対して、前記左右方向と上下方向に対して直交する前後方向に間隔を空けて配置され、前記一対の把持部材に把持された前記匣鉢を前記第1爪に押し付ける第2押付部材をさらに備えている、請求項1に記載のロボットハンド。
【請求項5】
前記第1押付部材と前記第2押付部材とを接続するリンクユニットをさらに備えており、
前記リンクユニットは、前記第1押付部材と前記第2押付部材とを同時に操作する、請求項4に記載のロボットハンド。
【請求項6】
前記第1押付部材は、
前記左右方向に対して直交する上下方向に前記匣鉢と当接する第1当接部と、
前記左右方向と前記上下方向に対して直交する前後方向に前記匣鉢と当接する第2当接部と、を備えている、請求項1から5のいずれか一項に記載のロボットハンド。
【請求項7】
前記第1押付部材は、回動軸の周りを回動可能であり、前記第1押付部材が前記匣鉢に当接する第1位置と、前記第1押付部材が前記匣鉢に当接しない第2位置との間を回動する、請求項1から5のいずれか一項に記載のロボットハンド。
【請求項8】
前記第1押付部材は、前記左右方向に対して直交する上下方向に前記匣鉢と当接し、
前記ロボットハンドは、前記左右方向と前記上下方向に対して直交する前後方向に前記匣鉢と当接する第3押付部材をさらに備えている、請求項1から5のいずれか一項に記載のロボットハンド。
【請求項9】
前記第1押付部材は、前記上下方向に移動可能であり、
前記第3押付部材は、前記前後方向に移動可能である、請求項8に記載のロボットハンド。
【請求項10】
前記左右方向に間隔を空けて配置される一対のハンドアームをさらに備えており、
前記一対のハンドアームのそれぞれには、前記一対の把持部材のうちの1個の把持部材と、前記第1爪と、前記第1押付部材と、前記第3押付部材とが取り付けられている、請求項8に記載のロボットハンド。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書に開示する技術は、ロボットハンドおよびロボットに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、ロボットハンドが開示されている。ロボットハンドは、熱処理炉から搬出された匣鉢を把持する。ロボットハンドは、左右方向に匣鉢を把持可能な一対の把持部材と、匣鉢を把持するための把持面の上側と下側に配置される一対の爪と、を備えている。一対の把持部材により匣鉢が把持されると、匣鉢が一対の爪の間に配置されることにより、把持部材から匣鉢が落下することが防止される。
【先行技術文献】
【特許文献】
【0003】
特許第6949260号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のロボットハンドでは、一対の爪が把持部材に移動不能に設けられており、一対の爪の間の距離が一定となっている。このため、ロボットハンドが匣鉢を把持しているときに匣鉢が一対の爪の間でがたつく。
【0005】
本明細書は、ロボットハンドが匣鉢を把持しているときに匣鉢ががたつくことを抑制することができる技術を開示する。
【課題を解決するための手段】
【0006】
本明細書に開示する技術の第1の態様では、ロボットハンドは、熱処理炉から搬出された匣鉢を把持する。ロボットハンドは、左右方向に前記匣鉢を把持可能な一対の把持部材と、前記一対の把持部材が前記匣鉢を把持しているときに前記匣鉢よりも上側または下側に配置される第1爪と、前記一対の把持部材に把持される前記匣鉢を前記第1爪に押し付ける第1押付部材と、を備えている。
【0007】
上記の構成によれば、匣鉢は、第1押付部材により第1爪に押し付けられる。これにより、ロボットハンドが匣鉢を把持しているときに匣鉢ががたつくことを抑制することができる。
【0008】
本明細書に開示する技術の第13の態様では、ロボットは、ロボットアームと、前記ロボットアームに取り付けられており、熱処理炉から搬出された匣鉢を把持するロボットハンドと、を備えている。前記ロボットハンドは、左右方向に前記匣鉢を把持可能な一対の把持部材と、前記一対の把持部材が前記匣鉢を把持しているときに前記匣鉢よりも上側または下側に配置される第1爪と、前記一対の把持部材に把持された前記匣鉢を前記第1爪に押し付ける第1押付部材と、を備えている。
【0009】
上記の構成によれば、上記のロボットハンドの効果と同様の効果を奏することができる。
【図面の簡単な説明】
【0010】
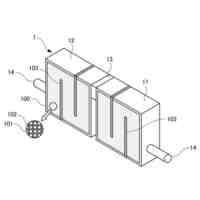
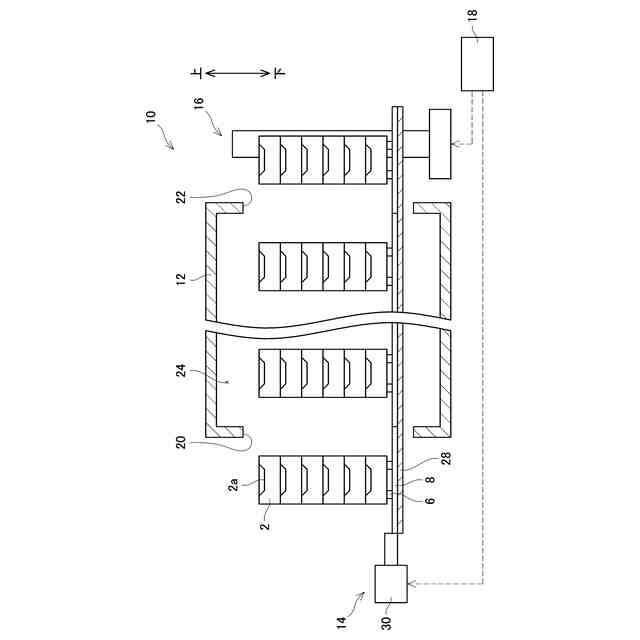
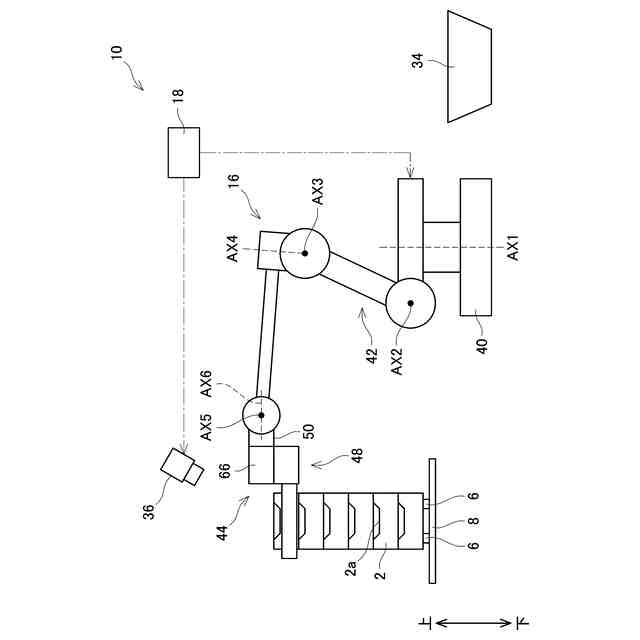
第1実施例の熱処理システムの概略断面図である。
第1実施例の熱処理システムの概略図である。
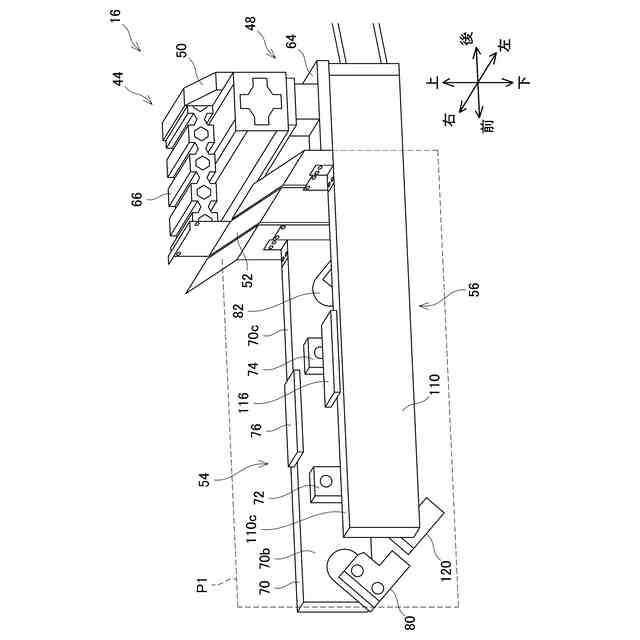
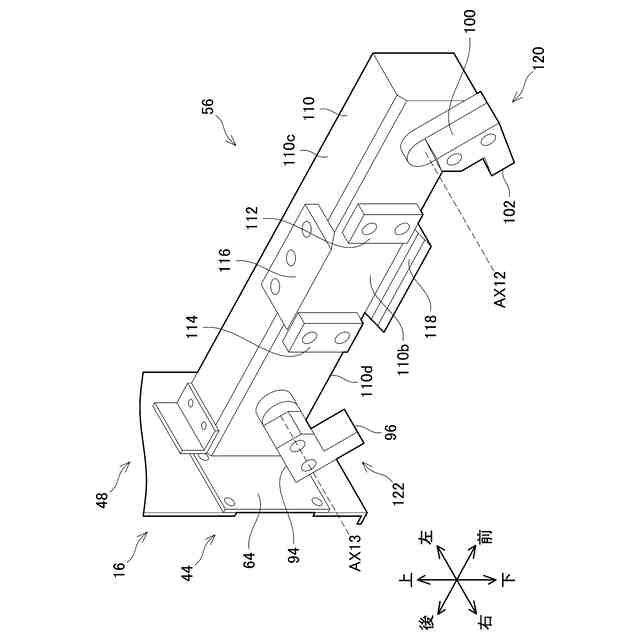
第1実施例のロボットハンドの斜視図である。
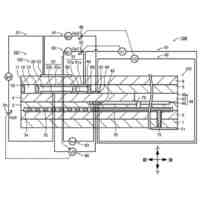
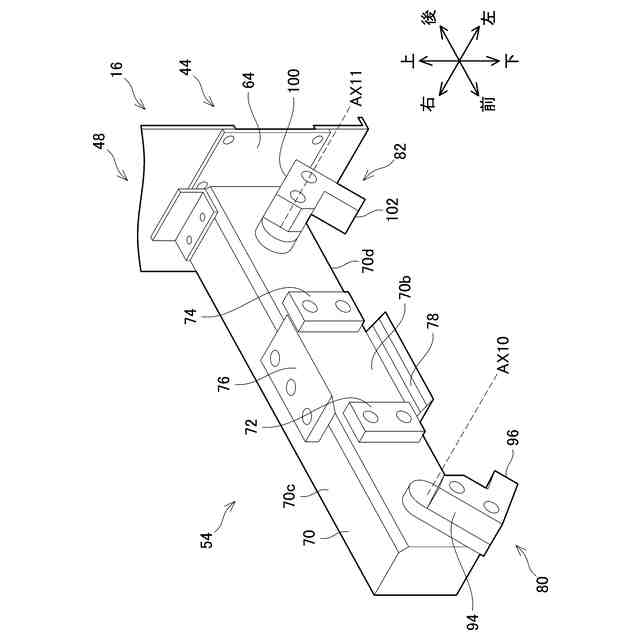
第1実施例のロボットハンドの右ハンドアーム部の斜視図である。
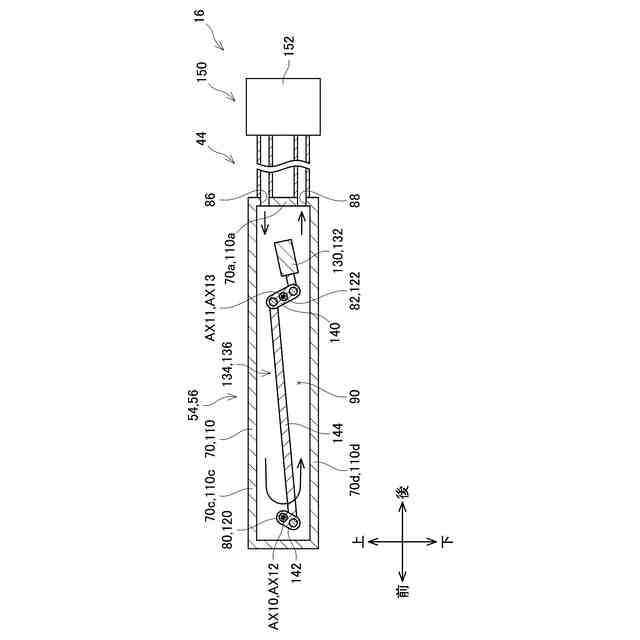
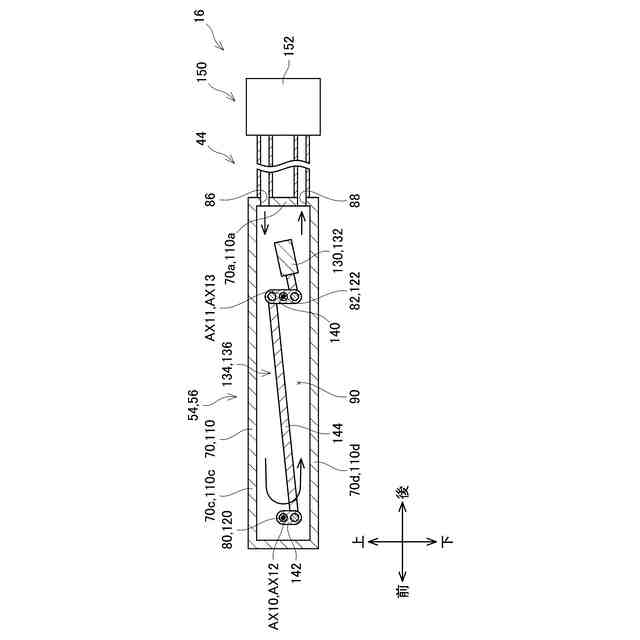
第1実施例において、第1右把持部材と第2右把持部材と第1左把持部材と第2左把持部材が第2位置に位置するときの第1右ハンドアーム部と左ハンドアーム部と冷却機構の断面図である。
第1実施例のロボットハンドの左ハンドアーム部の斜視図である。
第1実施例において、第1右把持部材と第2右把持部材と第1左把持部材と第2左把持部材が第1位置に位置するときの第1右ハンドアーム部と左ハンドアーム部と冷却機構の断面図である。
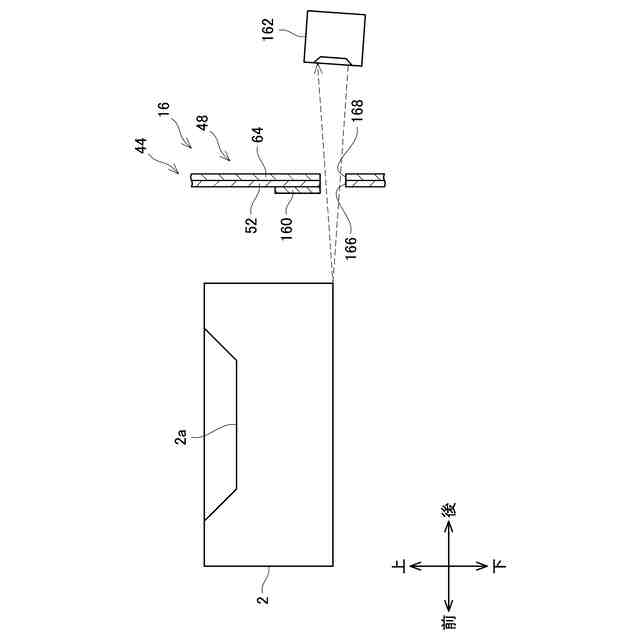
第1実施例において、シャッタが開位置に位置するときの匣鉢とハンドアームの断面図である。
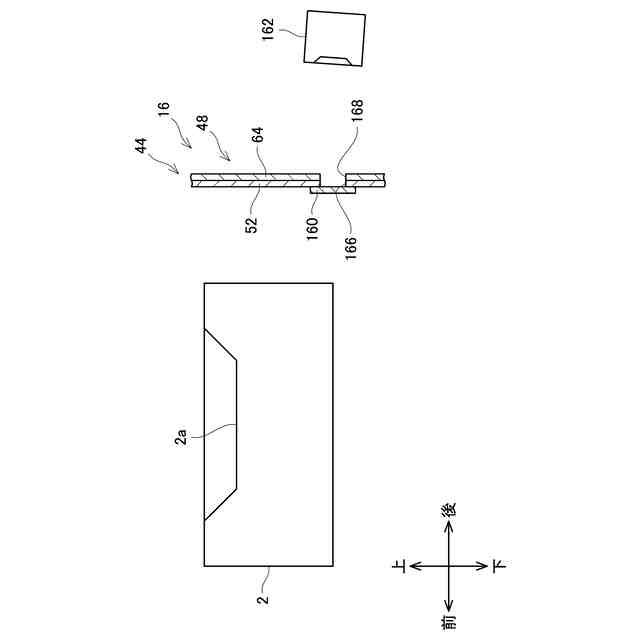
第1実施例において、シャッタが閉位置に位置するときの匣鉢とハンドアームの断面図である。
第1実施例での準備工程後の匣鉢とハンドアームの上面図である。
第1実施例での第1把持工程または第2把持工程後の匣鉢とハンドアームの上面図である。
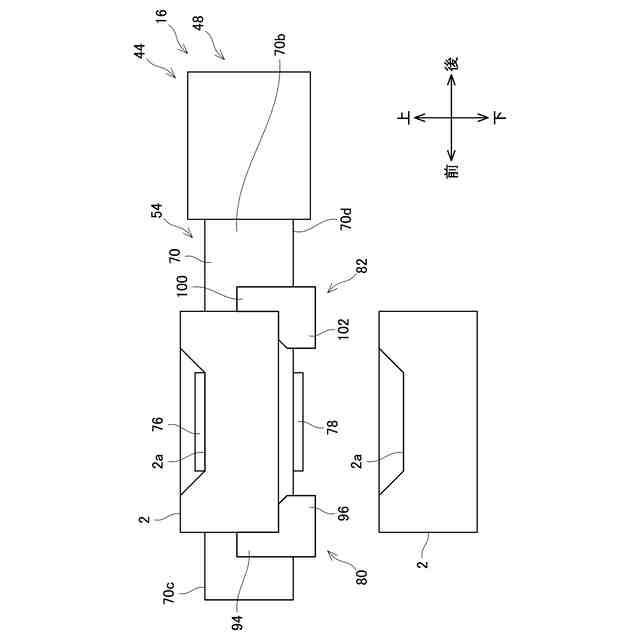
第1実施例での第1把持工程または第2把持工程後の匣鉢とハンドアームの側面図である。
第1実施例での持ち上げ工程後の匣鉢とハンドアームの側面図である。
第1実施例での位置決め工程後の匣鉢とハンドアームの側面図である。
第1実施例での第1反転工程後の匣鉢とハンドアームの側面図である。
第1実施例での第2移動工程後の匣鉢とハンドアームの側面図である。
第1実施例での把持解除工程後の匣鉢とハンドアームの側面図である。
第2実施例での第1把持工程後の匣鉢とハンドアームの側面図である。
第2実施例のハンドアームの上面図である。
第2実施例において、位置決め工程で第2右押付部材と第3右押付部材と第2左押付部材と第3左押付部材が移動する前の匣鉢とハンドアームの側面図である。
第2実施例での位置決め工程後の匣鉢とハンドアームの側面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本碍子株式会社
熱交換器
1か月前
日本碍子株式会社
熱交換器
1か月前
日本碍子株式会社
把持方法
1か月前
日本碍子株式会社
ウエハ載置台
1か月前
日本碍子株式会社
電気化学セル
16日前
日本碍子株式会社
亜鉛二次電池
1か月前
日本碍子株式会社
空調システム
1か月前
日本碍子株式会社
電気加熱式担体
1か月前
日本碍子株式会社
ハニカム構造体
1か月前
日本碍子株式会社
ハニカム構造体
1か月前
日本碍子株式会社
電気加熱式担体
1か月前
日本碍子株式会社
ハニカム構造体
1か月前
日本碍子株式会社
ハニカム構造体
1か月前
日本碍子株式会社
メタン製造反応器
1か月前
日本碍子株式会社
ハニカムフィルタ
1か月前
日本碍子株式会社
ウォーキングビーム炉
1か月前
日本碍子株式会社
三相型ハニカムヒータ
1か月前
日本碍子株式会社
セラミックサセプター
1か月前
日本碍子株式会社
半導体製造装置用ヒータ
1か月前
日本碍子株式会社
浄水膜構造体の製造方法
25日前
日本碍子株式会社
センサ素子及びガスセンサ
1か月前
日本碍子株式会社
センサ素子およびガスセンサ
1か月前
日本碍子株式会社
セラミックス部材の製造方法
1か月前
日本碍子株式会社
ロボットハンドおよびロボット
1か月前
日本碍子株式会社
ロボットハンドおよびロボット
1か月前
日本碍子株式会社
セラミックス試料の酸分解方法
1か月前
日本碍子株式会社
浄水膜構造体および浄水膜組立体
1か月前
日本碍子株式会社
ハニカム構造体及びハニカムヒータ
1か月前
日本碍子株式会社
放射性廃棄物の処理方法及び保管装置
1か月前
日本碍子株式会社
半導体製造装置用部材及びその再生方法
1か月前
日本碍子株式会社
半導体製造装置用部材及びその再生方法
1か月前
日本碍子株式会社
半導体製造装置用部材及びその再生方法
1か月前
日本碍子株式会社
トチの検査方法及びハニカム構造体の製造方法
1か月前
日本碍子株式会社
金属コンポジット焼結板およびリチウムイオン電池
1か月前
日本碍子株式会社
車両用空調システム、及び調湿デバイスの使用方法
23日前
日本碍子株式会社
センサ素子、ガスセンサ、および素子本体の製造方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ