TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025143660
公報種別
公開特許公報(A)
公開日
2025-10-02
出願番号
2024043002
出願日
2024-03-19
発明の名称
車両制御システム、車両制御方法及びプログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
B60W
50/023 20120101AFI20250925BHJP(車両一般)
要約
【課題】主系及び冗長系の演算装置を用いた車両の走行制御を行う場合において、主系から冗長系への切り替えの際の車両の挙動が不安定になるのを抑える。
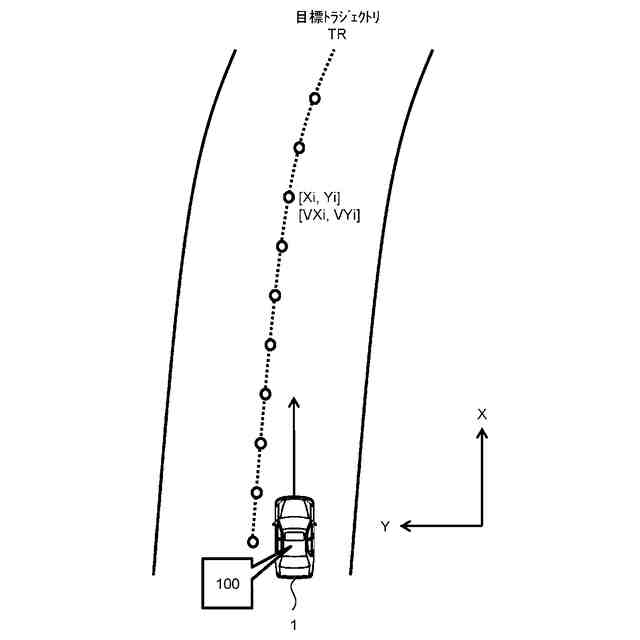
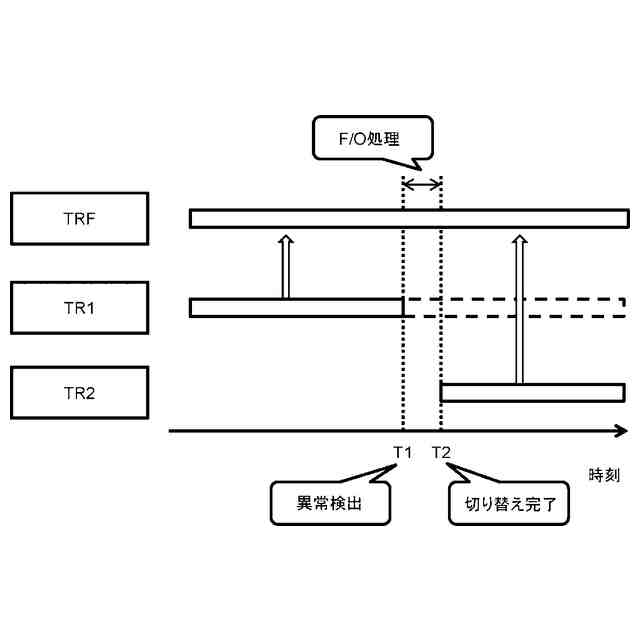
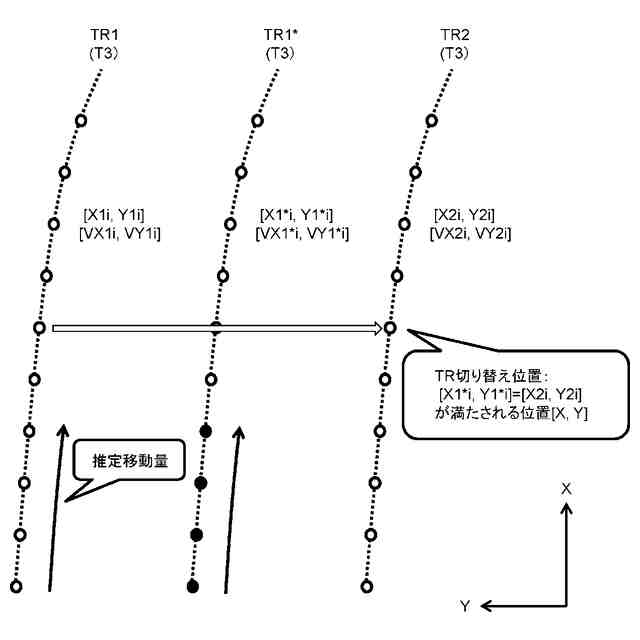
【解決手段】第1目標トラジェクトリを生成する演算装置が有する第1目標トラジェクトリの生成機能の異常が検出された場合、最終目標トラジェクトリの生成に用いる基礎目標トラジェクトリを、第1目標トラジェクトリから第2目標トラジェクトリに切り替えるフェールオーバー処理が行われる。フェールオーバー処理では、フェールオーバー処理の最中の車両の推定移動量に基づいて、生成機能の異常の検出以前に生成された第1目標トラジェクトリが更新される。そして、異常の検出以後に生成された第2目標トラジェクトリと、更新後の第1目標トラジェクトリとにおいて少なくとも目標位置が一致する位置が、基礎目標トラジェクトリの切り替え位置に設定される。
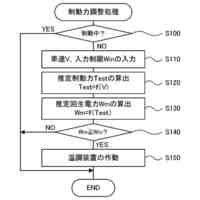
【選択図】図3
特許請求の範囲
【請求項1】
自動運転を行う車両を制御するシステムであって、
前記自動運転における第1目標トラジェクトリを生成する第1演算装置と、
前記自動運転における第2目標トラジェクトリを生成する第2演算装置と、
前記第1及び第2演算装置を管理し、前記自動運転における最終目標トラジェクトリを生成する管理装置と、
前記最終目標トラジェクトリに基づいて、前記車両の自動運転制御を行う制御装置と、
を備え、
前記第1、第2及び最終目標トラジェクトリは、前記車両の目標位置及び目標速度の集合からそれぞれ構成され、
前記管理装置は、
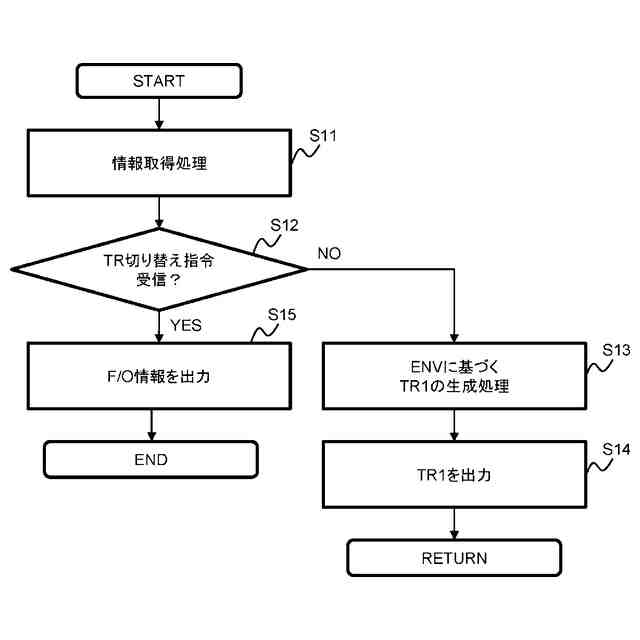
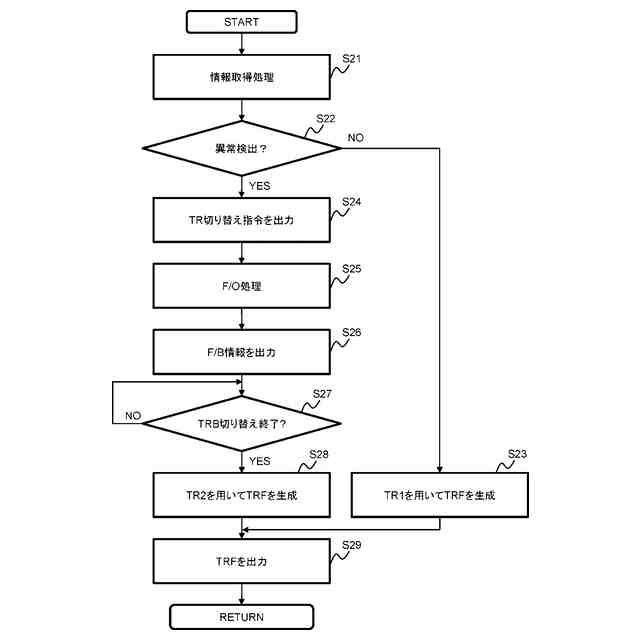
前記第1演算装置における前記第1目標トラジェクトリの生成機能が正常な場合、前記第1目標トラジェクトリを用いて前記最終目標トラジェクトリを生成し、
前記生成機能の異常が検出された場合、前記最終目標トラジェクトリの生成に用いる基礎目標トラジェクトリを、前記第1目標トラジェクトリから前記第2目標トラジェクトリに切り替えるフェールオーバー処理を行い、
前記管理装置は、前記フェールオーバー処理において、
前記異常の検出以前における前記車両の状態情報と、前記異常の検出以前に生成された前記第1目標トラジェクトリの最後の情報と、に基づいて、前記最後の情報を構成する前記第1目標トラジェクトリに従って前記車両が移動する場合における、前記フェールオーバー処理の最中の前記車両の移動量を推定し、
前記最後の情報を構成する前記第1目標トラジェクトリを前記車両の推定移動量に基づいて更新することによって、前記車両の更新目標位置及び更新目標速度を計算し、
前記更新目標位置及び更新目標速度の集合を示す第1集合と、前記異常の検出以後に生成された前記第2目標トラジェクトリを構成する前記目標位置及び目標速度の集合を示す第2集合とを比較し、
前記第1及び第2集合において少なくとも目標位置の情報が一致する位置を、前記基礎目標トラジェクトリの切り替え位置に設定する
ことを特徴とする車両制御システム。
続きを表示(約 2,500 文字)
【請求項2】
請求項1に記載のシステムであって、
前記管理装置は、前記フェールオーバー処理において、
前記第1及び第2集合において目標位置と目標速度の両方の情報が一致する位置を、前記基礎目標トラジェクトリの切り替え位置に設定する
ことを特徴とする車両制御システム。
【請求項3】
請求項1又は2に記載のシステムであって、
前記第2演算装置は、
前記第1目標トラジェクトリの生成機能が正常な場合、前記第2目標トラジェクトリの生成を待機し、
前記異常の検出後に前記第2目標トラジェクトリの生成を開始し、
前記異常の検出後における前記第2目標トラジェクトリの初回の生成を、前記最後の情報に基づいて行う
ことを特徴とする車両制御システム。
【請求項4】
請求項1又は2に記載のシステムであって、
前記管理装置は、前記フェールオーバー処理の最中に限って前記車両の更新目標位置及び更新目標速度の計算を行う
ことを特徴とする車両制御システム。
【請求項5】
請求項1又は2に記載のシステムであって、
前記管理装置は、前記フェールオーバー処理の最中に計算した前記更新目標位置及び更新目標速度の情報を前記第2演算装置に送信し、
前記フェールオーバー処理の最中に計算された前記更新目標位置及び更新目標速度の情報を受信した場合、前記第2演算装置は、前記受信した更新目標位置及び更新目標速度の情報と、に基づいて、前記更新目標位置及び更新目標速度の情報の受信以前に生成した前記第2目標トラジェクトリを更新する
ことを特徴とする車両制御システム。
【請求項6】
自動運転を行う車両を制御する方法であって、
前記自動運転における第1目標トラジェクトリを生成することと、
前記自動運転における第2目標トラジェクトリを生成することと、
前記自動運転における最終目標トラジェクトリを生成することと、
前記最終目標トラジェクトリに基づいて、前記車両の自動運転制御を行うことと、
を含み、
前記第1、第2及び最終目標トラジェクトリは、前記車両の目標位置及び目標速度の集合からそれぞれ構成され、
前記第1目標トラジェクトリを生成する演算装置が有する前記第1目標トラジェクトリの生成機能が正常な場合、前記第1目標トラジェクトリを用いて前記最終目標トラジェクトリが生成され、
前記生成機能の異常が検出された場合、前記最終目標トラジェクトリの生成に用いる基礎目標トラジェクトリを、前記第1目標トラジェクトリから前記第2目標トラジェクトリに切り替えるフェールオーバー処理が行われ、
前記フェールオーバー処理が、
前記異常の検出以前における前記車両の状態情報と、前記異常の検出以前に生成された前記第1目標トラジェクトリの最後の情報と、に基づいて、前記最後の情報を構成する前記第1目標トラジェクトリに従って前記車両が移動する場合における、前記フェールオーバー処理の最中の前記車両の移動量を推定することと、
前記最後の情報を構成する前記第1目標トラジェクトリを前記車両の推定移動量に基づいて更新することによって、前記車両の更新目標位置及び更新目標速度を計算することと、
前記更新目標位置及び更新目標速度の集合を示す第1集合と、前記異常の検出以後に生成された前記第2目標トラジェクトリを構成する前記目標位置及び目標速度の集合を示す第2集合とを比較することと、
前記第1及び第2集合において少なくとも目標位置の情報が一致する位置を、前記基礎目標トラジェクトリの切り替え位置に設定することと、
を含むことを特徴とする車両制御方法。
【請求項7】
自動運転を行う車両を制御するプログラムあって、
前記自動運転における第1目標トラジェクトリを生成することと、
前記自動運転における第2目標トラジェクトリを生成することと、
前記自動運転における最終目標トラジェクトリを生成することと、
前記最終目標トラジェクトリに基づいて、前記車両の自動運転制御を行うことと、
をコンピュータに実行させるように構成され、
前記第1、第2及び最終目標トラジェクトリは、前記車両の目標位置及び目標速度の集合からそれぞれ構成され、
前記第1目標トラジェクトリを生成する演算装置が有する前記第1目標トラジェクトリの生成機能が正常な場合、前記第1目標トラジェクトリを用いて前記最終目標トラジェクトリが生成され、
前記生成機能の異常が検出された場合、前記最終目標トラジェクトリの生成に用いる基礎目標トラジェクトリを、前記第1目標トラジェクトリから前記第2目標トラジェクトリに切り替えるフェールオーバー処理が行われ、
前記フェールオーバー処理が、
前記異常の検出以前における前記車両の状態情報と、前記異常の検出以前に生成された前記第1目標トラジェクトリの最後の情報と、に基づいて、前記最後の情報を構成する前記第1目標トラジェクトリに従って前記車両が移動する場合における、前記フェールオーバー処理の最中の前記車両の移動量を推定することと、
前記最後の情報を構成する前記第1目標トラジェクトリを前記車両の推定移動量に基づいて更新することによって、前記車両の更新目標位置及び更新目標速度を計算することと、
前記更新目標位置及び更新目標速度の集合を示す第1集合と、前記異常の検出以後に生成された前記第2目標トラジェクトリを構成する前記目標位置及び目標速度の集合を示す第2集合とを比較することと、
前記第1及び第2集合において少なくとも目標位置の情報が一致する位置を、前記基礎目標トラジェクトリの切り替え位置に設定することと、
を含むことを特徴とする車両制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自動運転を行う車両を制御するシステム、方法及びプログラムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特開2019-171970号公報は、自動運転を行う車両の走行制御を行うシステムを開示する。このシステムは、主系及び冗長系の演算装置を備える。主系の演算装置は、走行制御における目標トラジェクトリを演算する。冗長系の演算装置は、主系の演算装置に異常が発生した場合、主系の演算装置に代わって目標トラジェクトリを演算する。
【0003】
特開2021-127039号公報は、車両の自動運転を行うシステムを開示する。このシステムは、主系及び冗長系の走行制御部を備える。主系の走行制御部は、車両の自動運転を行う。主系の走行制御部の機能低下が検出された場合、主系の走行制御部は、冗長系の走行制御部に自動運転の引き継ぎ指示を送信する。冗長系の走行制御部は、引き継ぎ指示に含まれる情報に基づいて、車両の走行制御を行う。
【0004】
特開2021-075186号公報は、自動運転を行う車両の走行制御を行うシステムを開示する。このシステムは、複数の演算装置を備える。複数の演算装置は、走行制御における車両の目標トラジェクトリを別々に生成する。複数の演算装置の何れかに欠陥が生じた場合、このシステムは、欠陥に係る演算装置以外の演算装置が生成した目標トラジェクトリに基づいて走行制御を行う。
【先行技術文献】
【特許文献】
【0005】
特開2019-171970号公報
特開2021-127039号公報
特開2021-075186号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特開2021-075186号公報に記載のシステムは、主系と冗長系の演算装置を常に動作させるホットスタンバイ方式のシステムに分類される。これに対し、特開2019-171970号公報及び特開2021-127039号公報に記載のシステムは、主系の演算装置を動作させながら、冗長系の演算装置を待機させるウォームスタンバイ方式のシステムに分類される。
【0007】
ホットスタンバイ方式では、CPUやメモリなどのリソース不足に起因する欠陥が、主系及び冗長系で同時に発生する可能性がある。ホットスタンバイ方式では、また、主系と冗長系で別々に目標トラジェクトリが生成されるため、これらが全く同じにならないという課題もある。そのため、主系から冗長系への切り替えが瞬時に行われると、車両の急加速又は急減速が発生し、又は、車両の急な操舵が発生する可能性がある。
【0008】
この点、ウォームスタンバイ方式では、冗長系に割り当てるリソースを最小限にしてこれを待機させることができる。主系から冗長系への切り替え時に主系から冗長系に引き継ぎ情報を提供することで、切り替え時の車両の挙動を安定化させることもできる。しかしながら、ウォームスタンバイ方式はホットスタンバイ方式に比べ、主系から冗長系への切り替えに時間を要するという課題がある。そのため、引き継ぎ時の車両の状態と現在のそれとの間に乖離が生じ、車両の挙動が安定化しない可能性がある。
【0009】
本開示の1つの目的は、主系及び冗長系の演算装置を用いた車両の走行制御を行う場合において、主系から冗長系への切り替えの際の車両の挙動が不安定になるのを抑えるための技術を提供することにある。
【課題を解決するための手段】
【0010】
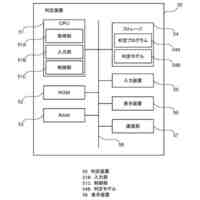
本開示の第1の観点は、自動運転を行う車両を制御するシステムであり次の特徴を有する。
前記システムは、第1及び第2演算装置と、管理装置と、制御装置とを備える。
前記第1演算装置は、前記自動運転における第1目標トラジェクトリを生成するように構成されている。前記第2演算装置は、前記前記自動運転における第2目標トラジェクトリを生成するように構成されている。前記管理装置は、前記第1及び第2演算装置を管理する。前記管理装置は、前記自動運転における最終目標トラジェクトリを生成するように構成されている。前記制御装置は、前記最終目標トラジェクトリに基づいて、前記車両の自動運転制御を行うように構成されている。
前記前記第1、第2及び最終目標トラジェクトリは、前記車両の目標位置及び目標速度の集合からそれぞれ構成される。
前記管理装置は、前記第1演算装置における前記第1目標トラジェクトリの生成機能が正常な場合、前記第1目標トラジェクトリを用いて前記最終目標トラジェクトリを生成し、前記生成機能の異常が検出された場合、前記最終目標トラジェクトリの生成に用いる基礎目標トラジェクトリを、前記第1目標トラジェクトリから前記第2目標トラジェクトリに切り替えるフェールオーバー処理を行う、ように構成されている。
前記管理装置は、前記フェールオーバー処理において、前記異常の検出以前における前記車両の状態情報と、前記異常の検出以前に生成された前記第1目標トラジェクトリの最後の情報と、に基づいて、前記最後の情報を構成する前記第1目標トラジェクトリに従って前記車両が移動する場合における、前記フェールオーバー処理の最中の前記車両の移動量を推定し、前記最後の情報を構成する前記第1目標トラジェクトリを前記車両の推定移動量に基づいて更新することによって、前記車両の更新目標位置及び更新目標速度を計算し、前記更新目標位置及び更新目標速度の集合を示す第1集合と、前記異常の検出以後に生成された前記第2目標トラジェクトリを構成する前記目標位置及び目標速度の集合を示す第2集合とを比較し、前記第1及び第2集合において少なくとも目標位置の情報が一致する位置を、前記基礎目標トラジェクトリの切り替え位置に設定するように構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
椅子
今日
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
方法
今日
トヨタ自動車株式会社
方法
今日
トヨタ自動車株式会社
電磁弁
今日
トヨタ自動車株式会社
固定子
5日前
トヨタ自動車株式会社
電動車
7日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
加熱器
4日前
トヨタ自動車株式会社
ケース
6日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
バッテリ
5日前
トヨタ自動車株式会社
二次電池
5日前
トヨタ自動車株式会社
車両構造
4日前
トヨタ自動車株式会社
車載装置
4日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
塗工装置
5日前
トヨタ自動車株式会社
製造装置
5日前
トヨタ自動車株式会社
通話装置
4日前
トヨタ自動車株式会社
ロボット
7日前
トヨタ自動車株式会社
バッテリ
5日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
監視装置
5日前
トヨタ自動車株式会社
判定装置
今日
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
路側装置
6日前
トヨタ自動車株式会社
電池パック
7日前
トヨタ自動車株式会社
ガスタンク
4日前
トヨタ自動車株式会社
電池パック
7日前
トヨタ自動車株式会社
三角表示板
4日前
トヨタ自動車株式会社
制御システム
4日前
トヨタ自動車株式会社
車両前部構造
5日前
トヨタ自動車株式会社
情報処理装置
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ