TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025140480
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024039910
出願日
2024-03-14
発明の名称
磁気ディスク装置およびその制御方法
出願人
株式会社東芝
,
東芝デバイス&ストレージ株式会社
代理人
弁理士法人スズエ国際特許事務所
主分類
G11B
5/596 20060101AFI20250919BHJP(情報記憶)
要約
【課題】アクチュエータに生じる振動を的確に検出することができる磁気ディスク装置およびその制御方法を提供する。
【解決手段】磁気ディスク装置は、アクチュエータのモータの駆動を制御することにより、磁気ヘッドを前記磁気ディスク上の停止位置から目標位置へとシークさせる。そして、磁気ディスク装置は、上記シークの加速度を、磁気ヘッドの位置履歴に基づいて検出し、かつモータの駆動電流の値に基づいて検出し、検出した両加速度の差分に基づいて、アクチュエータに生じる振動を検出する。
【選択図】図1
特許請求の範囲
【請求項1】
磁気ディスクと、
前記磁気ディスクに対するデータのライトおよびリードを行う磁気ヘッドと、
前記磁気ヘッドをモータの駆動により前記磁気ディスクの径方向にシーク可能に保持するアクチュエータと、
前記磁気ディスクの回転および前記磁気ヘッドのシークを制御するコントローラと、
を備え、
前記コントローラは、
前記モータの駆動を制御することにより、前記磁気ヘッドを前記磁気ディスク上の停止位置から目標位置へとシークさせるシーク制御手段と、
前記シークの加速度を、前記磁気ヘッドの位置履歴に基づいて検出し、かつ前記モータの駆動電流の値に基づいて検出する加速度検出手段と、
前記加速度検出手段で検出される両加速度の差分に基づいて、前記アクチュエータに生じる振動を検出する振動検出手段と、
を含む、
磁気ディスク装置。
続きを表示(約 1,500 文字)
【請求項2】
前記コントローラは、
前記磁気ディスク上の前記磁気ヘッドの位置を同磁気ヘッドのリードデータに基づいて捕捉する位置捕捉手段と、
前記位置捕捉手段の捕捉位置が前記目標位置を間に挟む規定範囲に収まった状態で一定期間が経過した場合に、前記磁気ヘッドが前記目標位置に達したと判定する判定手段と、
をさらに含む、
請求項1に記載の磁気ディスク装置。
【請求項3】
前記加速度検出手段は、前記位置捕捉手段の捕捉位置を二階微分演算することにより前記シークの加速度を検出する第1加速度検出手段、および前記モータの駆動電流の値に所定の換算係数を乗算することにより前記シークの加速度を検出する第2加速度検出手段を含む、
請求項2に記載の磁気ディスク装置。
【請求項4】
前記加速度検出手段は、前記位置捕捉手段の捕捉位置および前記モータの駆動電流の値に基づいて前記シークの速度を推定しこの推定速度を一階微分演算することにより前記シークの加速度を検出する第1加速度検出手段、および前記モータの駆動電流の値に所定の換算係数を乗算することにより前記シークの加速度を検出する第2加速度検出手段を含む、
請求項2に記載の磁気ディスク装置。
【請求項5】
前記シーク制御手段は、前記位置捕捉手段の捕捉位置に基づいて前記モータの駆動を制御することにより、前記磁気ヘッドを前記磁気ディスク上の前記停止位置から前記目標位置へと加速および減速を順に含めてシークさせ、
前記振動検出手段は、前記加速度検出手段で検出される両加速度の差分が所定の閾値以上の場合に、前記モータの加速用駆動電流の立上りに起因する振動が前記アクチュエータに生じていると判定する、
請求項2に記載の磁気ディスク装置。
【請求項6】
前記コントローラは、
前記モータの加速用駆動電流の立上りに起因する振動が生じていることが前記振動検出手段で判定された場合、その振動の周波数および位相を推定し、かつ前記モータの加速用駆動電流の立下りに起因して前記アクチュエータに生じ得る振動の周波数および位相を予測し、前記推定した振動の周波数および位相が前記予測した振動の周波数および位相と一致する状況において、前記モータの加速用駆動電流の立下りタイミングを補正する補正手段、
をさらに含む、
請求項5に記載の磁気ディスク装置。
【請求項7】
前記補正手段は、前記推定した振動の周波数および位相が前記予測した振動の周波数および位相と一致する状況において、前記モータの加速用駆動電流の立下りタイミングを遅れ方向に補正する、
請求項6に記載の磁気ディスク装置。
【請求項8】
前記補正手段は、前記モータの加速用駆動電流の立下りタイミングを遅れ方向に補正する分だけ、前記モータの加速用駆動電流の最大値を減少する、あるいは前記モータの減速用駆動電流の最大値を増加する、
請求項7に記載の磁気ディスク装置。
【請求項9】
前記補正手段は、前記推定した振動の周波数および位相が前記予測した振動の周波数および位相と一致する状況において、前記モータの加速用駆動電流の立下りタイミングを進み方向に補正する、
請求項6に記載の磁気ディスク装置。
【請求項10】
前記補正手段は、前記モータの加速用駆動電流の立下りタイミングを遅れ方向に補正する分だけ、前記モータの加速用駆動電流の最大値を増加する、あるいは前記モータの減速用駆動電流の最大値を減少する、
請求項9に記載の磁気ディスク装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
実施形態は、磁気ディスクおよび磁気ヘッドを備える磁気ディスク装置およびその磁気ディスク装置の制御方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
磁気ディスクおよび磁気ヘッドを備える磁気ディスク装置は、磁気ヘッドを磁気ディスクの径方向にシーク可能に保持するアクチュエータを含み、磁気ディスクに対するデータのライトおよびリードに際し、磁気ヘッドを直前の停止位置から磁気ディスク上の目標位置(ライト位置またはリード位置)へとその磁気ディスクの径方向にシーク(移動)させる。
シーク中の磁気ヘッドの位置は、磁気ディスク上の位置決め用のサーボパターンに対する磁気ヘッドのリードデータから逐次に捕捉することができる。この捕捉位置が目標位置を間に挟む規定範囲に収まった状態で所定期間が経過したとき、磁気ヘッドが目標位置に達したとの判断の下に、シークが終了する。上記捕捉位置が目標位置を間に挟む規定範囲に収まった状態で一定期間が経過したか否かの判定をセトリング(整定)判定という。
【先行技術文献】
【特許文献】
【0003】
米国特許第6982848号明細書
特公平1-43379号公報
米国特許第7570445号明細書
米国特許第10553248号明細書
米国特許第10217485号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
磁気ヘッドのシーク中、種々の要因による振動がアクチュエータに生じることがある。この振動は磁気ヘッドに伝わるので好ましくない。
実施形態の目的は、アクチュエータに生じる振動を的確に検出することができる磁気ディスク装置およびその制御方法を提供することである。
【課題を解決するための手段】
【0005】
実施形態の磁気ディスク装置は、磁気ディスクと;この磁気ディスクに対するデータのライトおよびリードを行う磁気ヘッドと;前記磁気ヘッドをモータの駆動により前記磁気ディスクの径方向にシーク可能に保持するアクチュエータと;前記磁気ディスクの回転および前記磁気ヘッドのシークを制御するコントローラと;を備える。前記コントローラは、前記モータの駆動を制御することにより、前記磁気ヘッドを前記磁気ディスク上の停止位置から目標位置へとシークさせるシーク制御手段と;前記シークの加速度を、前記磁気ヘッドの位置履歴に基づいて検出し、かつ前記モータの駆動電流の値に基づいて検出する加速度検出手段と;前記加速度検出手段で検出される両加速度の差分に基づいて、前記アクチュエータに生じる振動を検出する振動検出手段と;を含む。
【図面の簡単な説明】
【0006】
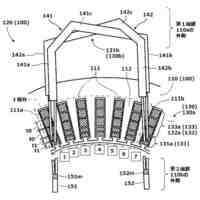
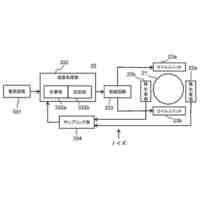
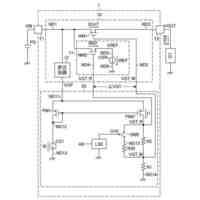
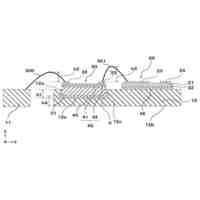
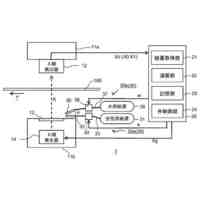
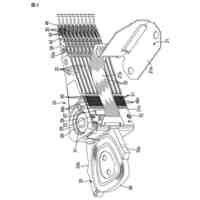
図1は、各実施形態の全体的な構成を概略的に示す図。
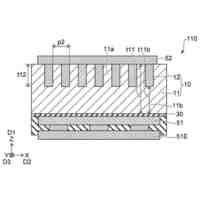
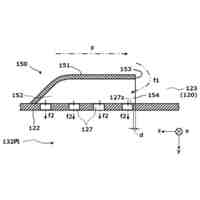
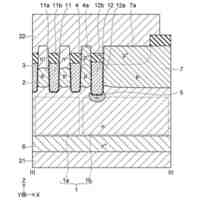
図2は、各実施形態における磁気ディスクの要部の構成を示す図。
図3は、各実施形態におけるシーク中のモータの駆動電流の変化、その駆動電流の変化によりアクチュエータに加わるジャーク(加振力)、そのジャークによりアクチュエータに生じる振動の振幅を示す図。
図4は、各実施形態における位置捕捉セクションおよび各加速度検出セクションを示すブロック図。
図5は、図4の変形例を示すブロック図。
図6は、図4および図5の加速度検出セクションで検出される両加速度およびその差分を示す図。
図7は、各実施形態におけるアクチュエータに生じる複数の振動の周波数および位相をモータの駆動電流およびジャークと共に示す図。
図8は、各実施形態における周波数テーブルのフォーマットを示す図。
図9は、第1実施形態の制御を示すフローチャート。
図10は、各実施形態におけるセトリング判定の処理を示す図。
図11は、第2実施形態におけるシークが加速と減速との間に定速期間を含む様子をモータの駆動電流およびジャークと共に示す図。
図12は、第3実施形態におけるモータの加速用駆動電流および減速用駆動電流の制御を示す図。
図13は、第4実施形態におけるモータの加速用駆動電流および減速用駆動電流の制御を示す図。
図14は、第5実施形態におけるモータの加速用駆動電流および減速用駆動電流の制御を示す図。
図15は、第6実施形態の制御を示すフローチャート。
【発明を実施するための形態】
【0007】
[1]第1実施形態
以下、第1実施形態について図面を参照しながら説明する。
図1に示すように、磁気ディスク装置1は、記録媒体である磁気ディスク2、この磁気ディスク2を回転駆動するスピンドルモータ3、その磁気ディスク2に対するデータのライト(書込み)およびリード(読出し)を行う磁気ヘッド10を含む。この磁気ヘッド10を支持するアクチュエータ20が磁気ディスク2の近傍に配置されている。
【0008】
アクチュエータ20は、磁気ヘッド10を磁気ディスク2の径方向にシーク可能に支持する。すなわち、アクチュエータ20は、アクチュエータブロックあるいはヘッドスタックアッセンブリ(HSA;Head Stack Assembly)とも称し、回転軸21、この回転軸21に中途部が保持されたアーム22、このアーム22の基端部に設けられたボイスコイルモータ(VCM)23、このアーム23の先端部に設けられて上記磁気ヘッド10を保持するサスペンション部材24などを含み、ボイスコイルモータ23に駆動電流Ivcmが供給されることにより、磁気ヘッド10を図示破線の第1位置から図示実線の第2位置へと回動させる。この回動に伴い、磁気ヘッド10が磁気ディスク2の径方向に図示Tの軌跡でシーク(移動)する。
【0009】
アクチュエータ20の近傍に、ストッパSTおよびランプ機構RLが配置されている。ストッパSTは、磁気ヘッド16の移動位置を磁気ディスク12の内周側において制限する。ランプ機構RLは、磁気ヘッド16の移動位置を磁気ディスク12の外周側において制限する。
【0010】
磁気ディスク装置1は、制御の中枢となるコントローラ30、磁気ヘッド10を駆動するヘッドアンプ41、このヘッドアンプ41とコントローラ30との接続間に設けられた信号処理回路42、上記ボイスコイルモータ23とコントローラ30との接続間に設けられたモータドライバ43、コントローラ30の制御に必要なプログラム等を格納したメモリであるDRAM44、コントローラ30の制御に必要な各種データを格納したメモリであるフラッシュROM45、コントローラ30とハードディスクコントローラ(HDC)と外部のホスト装置50との接続間に設けられたハードディスクコントローラ(HDC)46などを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東芝
センサ
7日前
株式会社東芝
センサ
7日前
株式会社東芝
センサ
1か月前
株式会社東芝
モータ
2日前
株式会社東芝
固定子
1か月前
株式会社東芝
センサ
1か月前
株式会社東芝
遮断装置
3か月前
株式会社東芝
回路素子
1か月前
株式会社東芝
吸音装置
2日前
株式会社東芝
ドア構造
1か月前
株式会社東芝
電子装置
1日前
株式会社東芝
金型構造
7日前
株式会社東芝
配線治具
2か月前
株式会社東芝
燃料電池
2か月前
株式会社東芝
電磁流量計
2か月前
株式会社東芝
半導体装置
14日前
株式会社東芝
電動送風機
1か月前
株式会社東芝
粒子加速器
1日前
株式会社東芝
ラック装置
1か月前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
16日前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
4日前
株式会社東芝
半導体装置
2か月前
株式会社東芝
主幹制御器
2か月前
株式会社東芝
X線厚み計
2か月前
株式会社東芝
ディスク装置
2か月前
株式会社東芝
開発支援装置
1か月前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
ディスク装置
4日前
株式会社東芝
熱電変換装置
2日前
株式会社東芝
計測システム
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ