TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025137085
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024036082
出願日
2024-03-08
発明の名称
作業車両
出願人
ヤンマーホールディングス株式会社
代理人
弁理士法人 佐野特許事務所
主分類
E02F
9/20 20060101AFI20250911BHJP(水工;基礎;土砂の移送)
要約
【課題】遠隔操作装置による走行機体の動作が可能な状態と不能な状態とのいずれにおいても走行機体を容易に移動させることができる技術を提供する。
【解決手段】走行機体と、走行機体に設けられ、走行機体を操作する車載操作装置と、走行機体とは別体で設けられ、走行機体を操作する遠隔操作装置と、を備える作業車両であって、遠隔操作装置を用いて走行機体を動作させる第1動作モードと、車載操作装置を用いて走行機体を動作させる第2動作モードと、を有する。
【選択図】図9
特許請求の範囲
【請求項1】
走行機体と、
前記走行機体に設けられ、前記走行機体を操作する車載操作装置と、
前記走行機体とは別体で設けられ、前記走行機体を操作する遠隔操作装置と、を備える作業車両であって、
前記遠隔操作装置を用いて前記走行機体を動作させる第1動作モードと、
前記車載操作装置を用いて前記走行機体を動作させる第2動作モードと、を有する、作業車両。
続きを表示(約 520 文字)
【請求項2】
前記第2動作モードにおいては、前記遠隔操作装置を用いて前記走行機体を動作させることが禁止される、請求項1に記載の作業車両。
【請求項3】
前記第1動作モードから前記第2動作モードへの切替を可能とする切替操作部を備え、
前記切替操作部は、前記走行機体に設けられる、請求項1に記載の作業車両。
【請求項4】
前記車載操作装置は、前記走行機体に対して走行指示を可能とする走行操作部を有し、
前記走行操作部は、前記第1動作モードから前記第2動作モードへの切替を可能とする、請求項1に記載の作業車両。
【請求項5】
報知部を備え、
前記車載操作装置は、前記走行機体において、水平方向に含まれる一方向の一方側に配置され、
前記報知部は、前記第2動作モードにおいて、前記走行機体が前記一方向の一方側に移動するときに報知する、請求項1に記載の作業車両。
【請求項6】
前記第2動作モードにおいては、前記走行機体の速度が前記第1動作モードにおける前記走行機体の速度域のうちの低速域に制限される、請求項1から5のいずれかに記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
草刈走行を行う走行機体を備え、送信機(遠隔操作装置)を用いて人為操作可能な草刈機が従来技術として知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2019-106941号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の構成では、遠隔操作装置が正常な場合には、遠隔操作装置を用いて走行機体を動作(特に走行)させて、走行機体を容易に移動させることができる。しかし、例えば、遠隔操作装置の異常、あるいは、電源不足等が起こると、遠隔操作装置による走行機体の動作が不能になり、走行機体を移動させることができなくなる。この場合、走行機体を移動させるためには、例えば、走行機体とは別の装置を用意して、走行機体を吊り上げる必要があり、走行機体の移動が困難となる。
【0005】
本発明は、上記の問題点を解決するためになされたものであり、その目的は、遠隔操作装置による走行機体の動作が可能な状態と不能な状態とのいずれにおいても走行機体を容易に移動させることができる技術を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一側面に係る作業車両は、走行機体と、前記走行機体に設けられ、前記走行機体を操作する車載操作装置と、前記走行機体とは別体で設けられ、前記走行機体を操作する遠隔操作装置と、を備える作業車両であって、前記遠隔操作装置を用いて前記走行機体を動作させる第1動作モードと、前記車載操作装置を用いて前記走行機体を動作させる第2動作モードと、を有する。
【発明の効果】
【0007】
上記の構成によれば、遠隔操作装置による走行機体の動作が可能な状態と不能な状態とのいずれにおいても走行機体を容易に移動させることができる。
【図面の簡単な説明】
【0008】
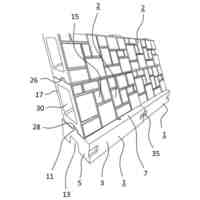
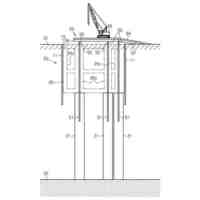
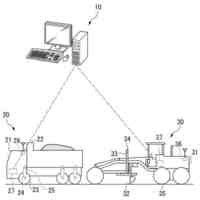
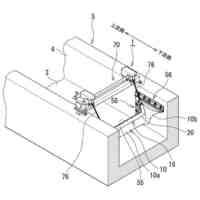
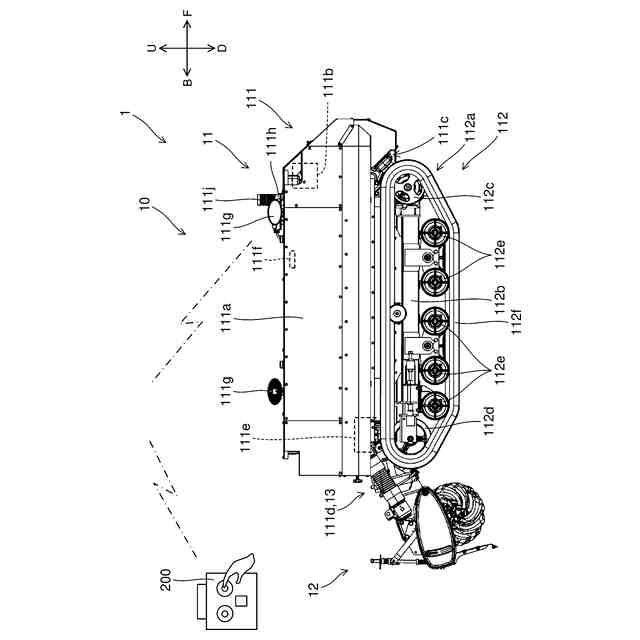
本発明の実施の一形態に係る作業車両の概略の構成を示す図である。
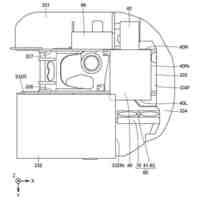
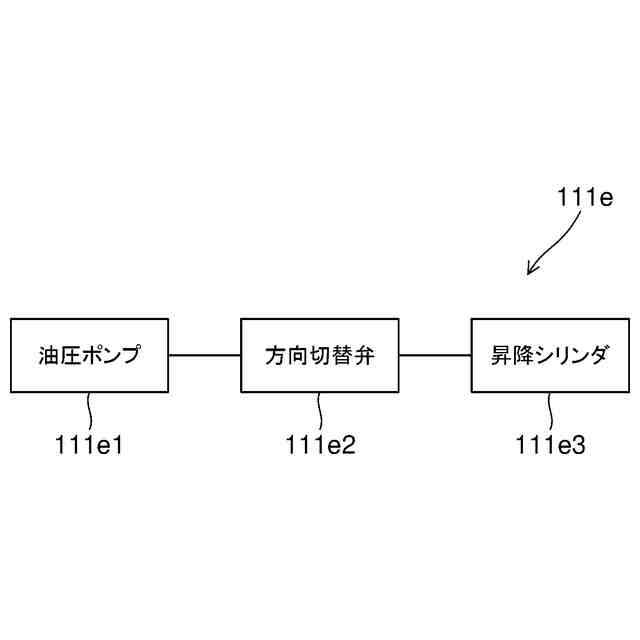
上記作業車両に備わる走行機体に設けられる作業機昇降装置の構成を模式的に示すブロック図である。
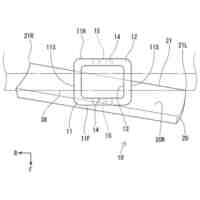
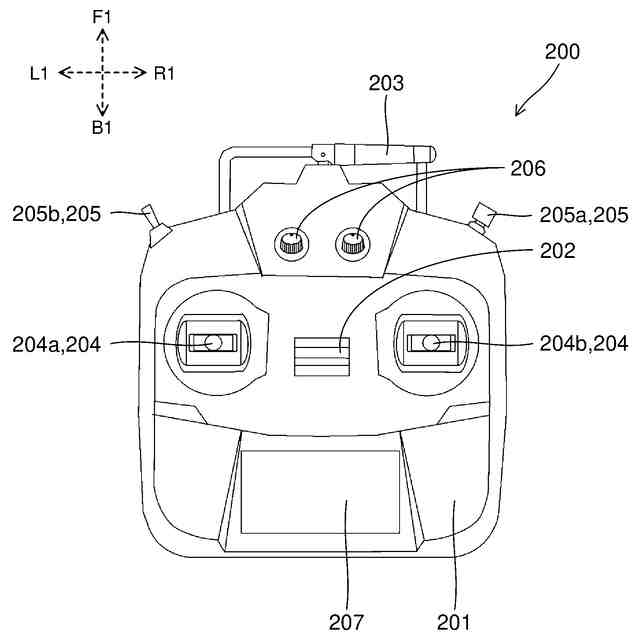
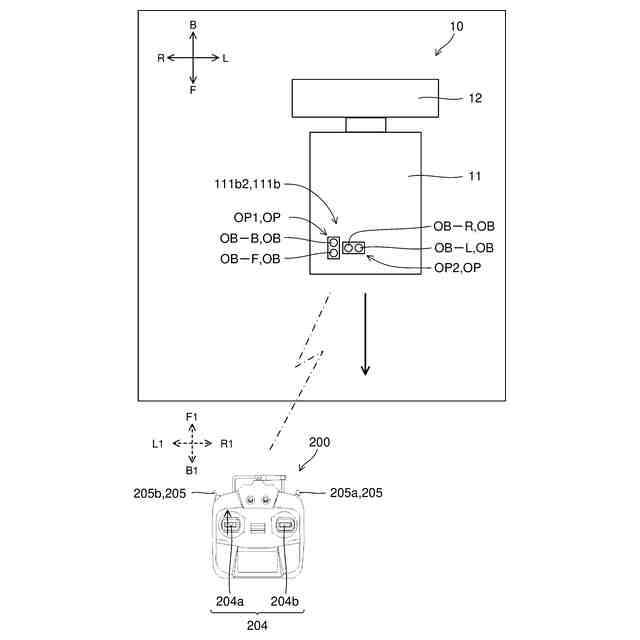
上記作業車両に備わる遠隔操作装置の構成を示す平面図である。
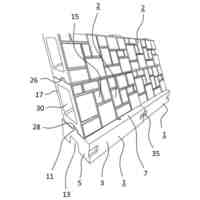
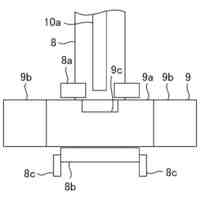
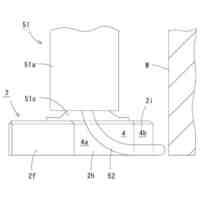
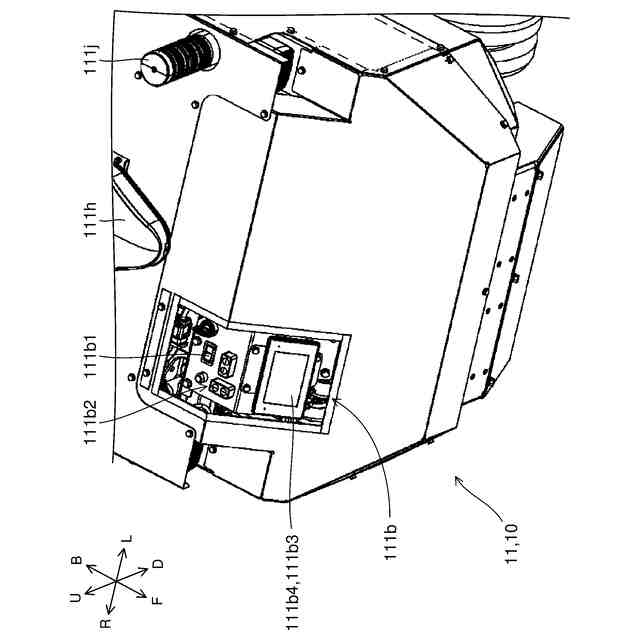
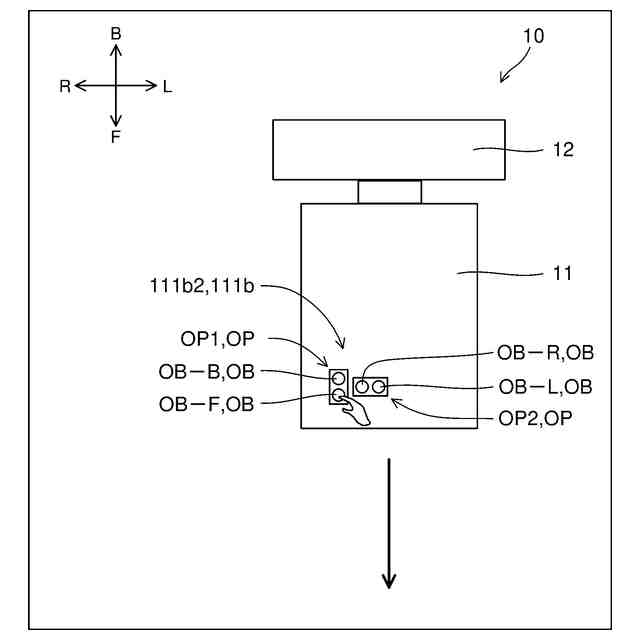
上記走行機体に設けられる車載操作装置の構成を示す斜視図である。
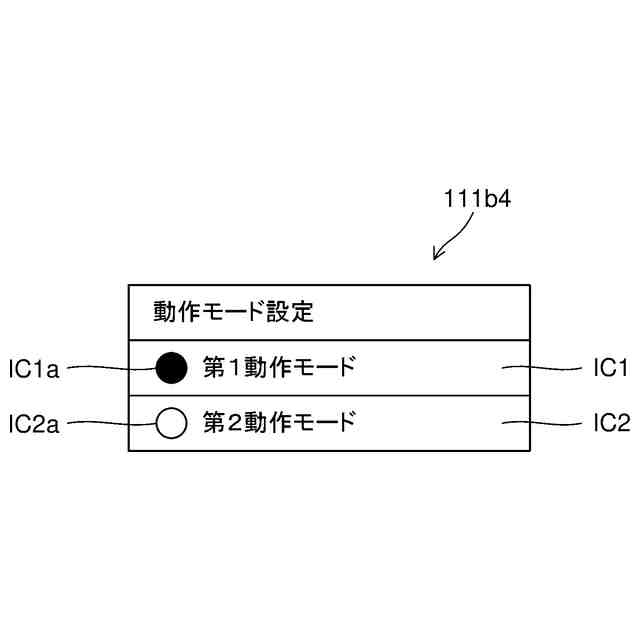
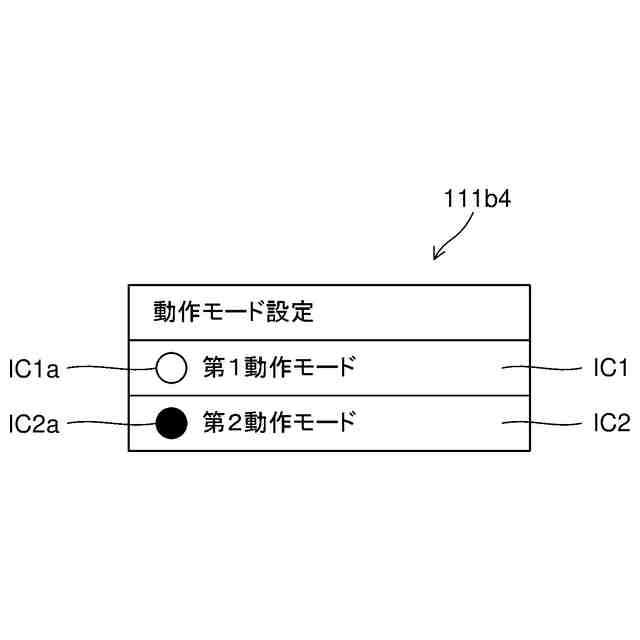
上記車載操作装置に設けられる切替操作部の構成を示す図である。
上記切替操作部の構成を示す図である。
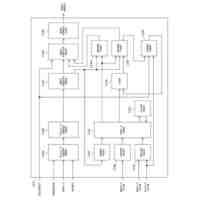
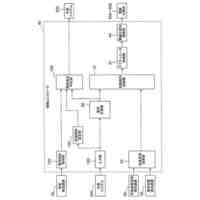
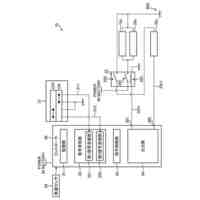
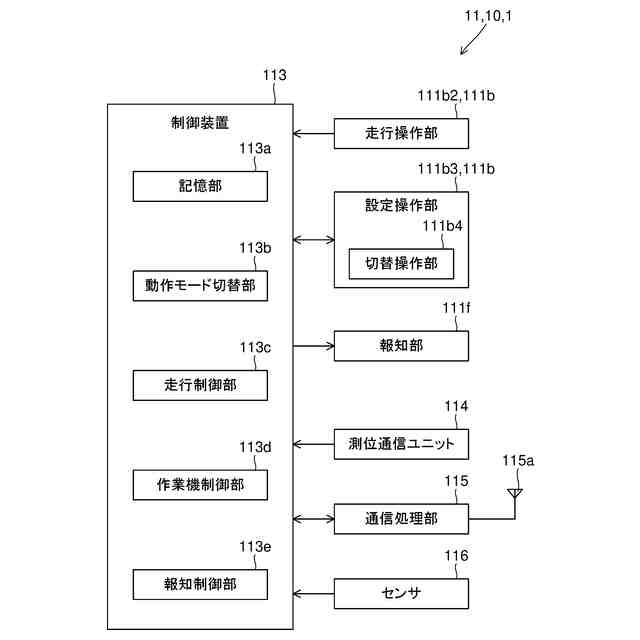
上記作業車両の制御系の構成を模式的に示すブロック図である。
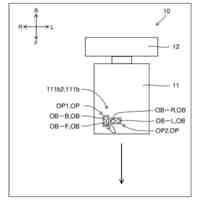
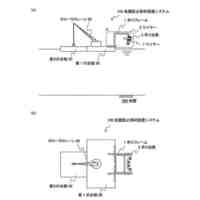
上記作業車両の第1動作モードにおける上記走行機体の動作を説明する説明図である。
上記作業車両の第2動作モードにおける上記走行機体の動作を説明する説明図である。
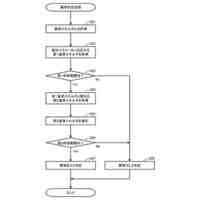
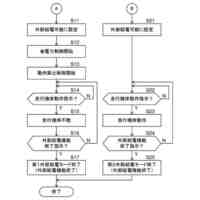
上記第2動作モードにおいて上記遠隔操作装置による動作指示があったときの流れを示すフローチャートである。
上記車載操作装置の前進操作ボタンの操作量に対する上記第2動作モードでの上記走行機体の目標速度の変化を示すグラフである。
上記第1動作モードから上記第2動作モードへの切替設定の流れを示すフローチャートである。
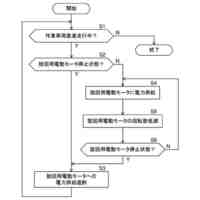
上記走行機体に設けられる報知部が報知するときの流れを示すフローチャートである。
【発明を実施するための形態】
【0009】
本発明の実施の形態について、図面に基づいて説明すれば、以下の通りである。
【0010】
〔1.作業車両の概略構成〕
図1は、本発明の実施の一形態に係る作業車両1の概略の構成を示す図である。作業車両1は、例えば農作業、建設作業等の作業を行うために利用される。作業車両1は、車両本体10と、遠隔操作装置200と、を備える。車両本体10は、地面を走行する走行機体11と、走行機体11に連結される作業機12と、を備える。すなわち、作業車両1は、走行機体11と、作業機12と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
鋼管
1日前
株式会社武井工業所
積みブロック
10日前
株式会社大林組
袋体付き排水パイプ
今日
株式会社大林組
袋体付き排水パイプ
今日
日立建機株式会社
作業機械
8日前
ゼニヤ海洋サービス株式会社
通船ゲート
今日
株式会社フジタ
掘削機
9日前
鹿島建設株式会社
接続方法および接続構造
今日
有限会社 櫂設計事務所
掘削・撹拌具
16日前
JFEスチール株式会社
鋼管矢板の継手構造
2日前
株式会社フジタ
建築物とその施工方法
今日
JFEスチール株式会社
鋼管矢板の継手構造
2日前
株式会社大林組
建物の構築方法及び建物
今日
株式会社武井工業所
積みブロック用基礎ブロック
10日前
株式会社小松製作所
作業機械
10日前
日立建機株式会社
作業機械
今日
株式会社トラバース
地盤改良ユニット及び地盤改良機
9日前
日立建機株式会社
作業機械
24日前
日本コンクリート工業株式会社
堤防の補強構造
今日
株式会社小松製作所
作業機械
17日前
JFEスチール株式会社
モノパイル
18日前
コベルコ建機株式会社
作業機械
14日前
日立建機株式会社
建設機械の作業装置
今日
株式会社あけぼの産業
杭圧入装置及び杭圧入方法
1日前
株式会社小松製作所
路面整備システム
9日前
豊国工業株式会社
膜状起伏ゲート
9日前
ニチコン株式会社
機器設置用基礎ブロック
1日前
株式会社コマツレンタル宮崎
スクレーパ
11日前
ヤンマーホールディングス株式会社
作業車両
今日
ヤンマーホールディングス株式会社
作業車両
今日
ヤンマーホールディングス株式会社
作業車両
今日
ウチノ看板株式会社
ポール工作物及びポール工作物の設置方法
11日前
鹿島建設株式会社
洗掘防止部材設置システム、洗掘防止部材設置方法
23日前
ヤンマーホールディングス株式会社
作業機械
9日前
五洋建設株式会社
泥土と製鋼スラグとの混合方法およびシステム
8日前
鹿島建設株式会社
風力発電用基礎構造、風力発電用基礎構造の施工方法
23日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ