TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025136901
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024035830
出願日
2024-03-08
発明の名称
直動アクチュエータ
出願人
NTN株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H02P
7/06 20060101AFI20250911BHJP(電力の発電,変換,配電)
要約
【課題】設置スペースの低減および設計の自由度の向上を図り、コスト低減を図ると共に制御システムの精度を高めることができる直動アクチュエータを提供する。
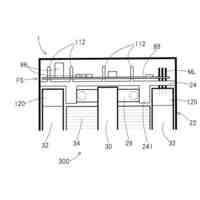
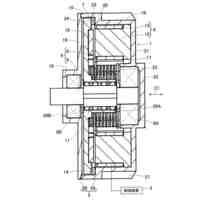
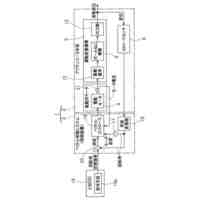
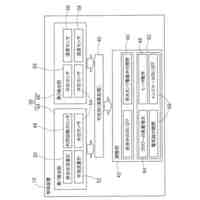
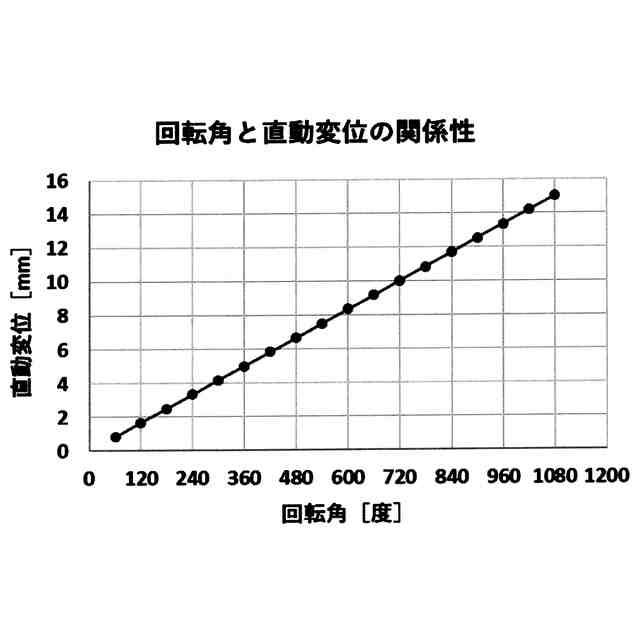
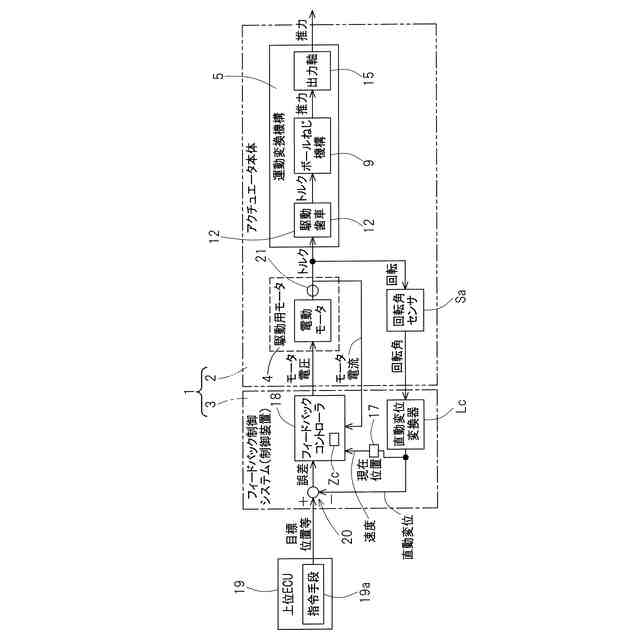
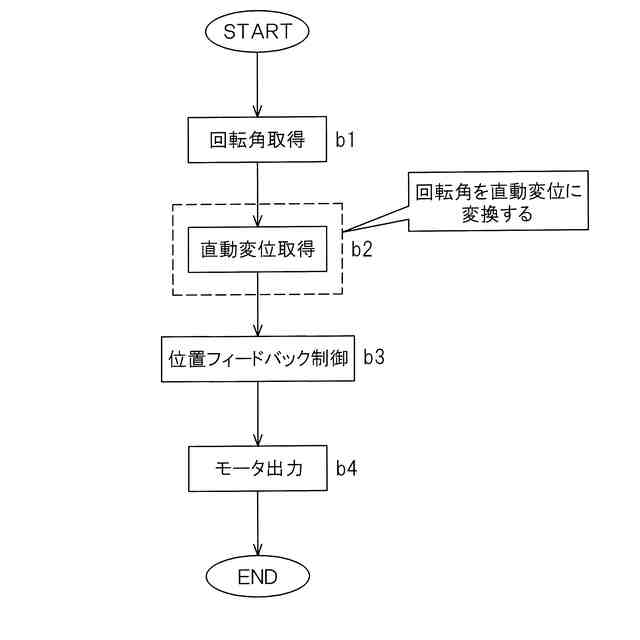
【解決手段】直動アクチュエータ1は、電動モータ4と、この電動モータ4の回転運動を直線運動に変換する運動変換機構5と、電動モータ4の回転角を検出する回転角センサSaと、電動モータ4を制御する制御装置3とを備える。制御装置3は、回転角センサSaで検出された回転角を、運動変換機構5の直動変位に変換する直動変位変換器Lcと、直動変位の初期位置であるゼロ点を補正するゼロ点補正機構Zcとを有する。制御装置3は、直動変位変換器Lcで変換された直動変位を用いて、電動モータ4を制御する。
【選択図】図4
特許請求の範囲
【請求項1】
電動モータと、この電動モータの回転運動を直線運動に変換する運動変換機構と、前記電動モータの回転角を検出する回転角センサと、前記電動モータを制御する制御装置とを備えた直動アクチュエータであって、
前記制御装置は、
前記回転角センサで検出された回転角を、前記運動変換機構の直動変位に変換する直動変位変換器と、
前記直動変位の初期位置であるゼロ点を補正するゼロ点補正機構と、を有し、
前記直動変位変換器で変換された直動変位を用いて、前記電動モータを制御する直動アクチュエータ。
続きを表示(約 380 文字)
【請求項2】
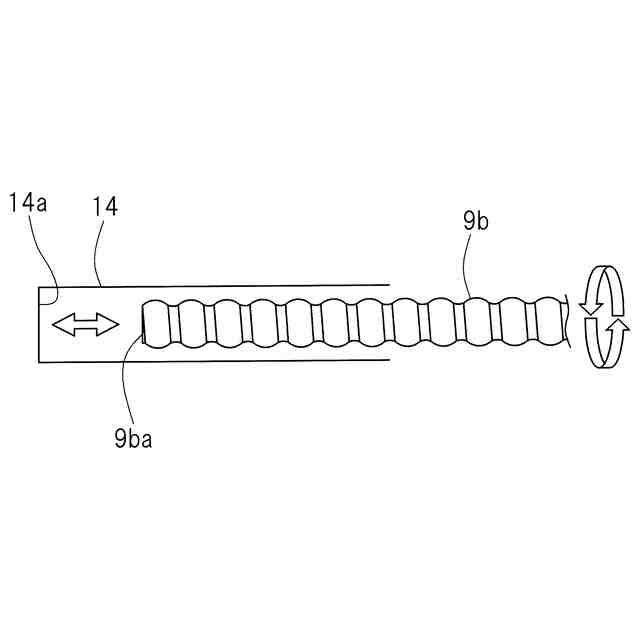
請求項1に記載の直動アクチュエータにおいて、前記運動変換機構は、前記電動モータの回転を減速する減速機と、この減速機の回転出力を直線運動に変換する直動機構とを有する直動アクチュエータ。
【請求項3】
請求項1または請求項2に記載の直動アクチュエータにおいて、前記制御装置は、与えられた目標位置に対して、前記直動変位をフィードバック制御する直動アクチュエータ。
【請求項4】
請求項2に記載の直動アクチュエータにおいて、前記制御装置は、前記ゼロ点補正機構によるゼロ点の補正時に、前記直動機構の直動部の速度、モータ電流、モータ電圧の少なくともいずれか一つを制限する直動アクチュエータ。
【請求項5】
請求項1に記載の直動アクチュエータにおいて、前記電動モータがブラシ付きモータである直動アクチュエータ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、直動アクチュエータに関し、設置スペースの低減および設計の自由度の向上を図り、コスト低減を図ると共に制御システムの精度を高めることができる技術に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
ボールねじを組み込んだ直動アクチュエータは、自動車のブレーキなど自動車産業において、油圧駆動部の代替となる重要な役割を担っている。従来の直動アクチュエータの設計では、制御が簡単なブラシ付きモータとストロークセンサの組み合わせが一般である。しかし、ストロークセンサは直動部に取り付けなければならないという制限がある。このため、直動アクチュエータのハウジングを拡大する必要があり、直動アクチュエータの寸法が大きくなる。これは、ストロークセンサの設置スペースが限られている、またはストロークセンサの使用が不可能な用途では、大きな課題となる。
【0003】
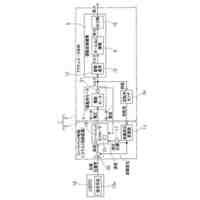
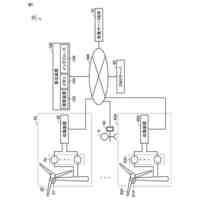
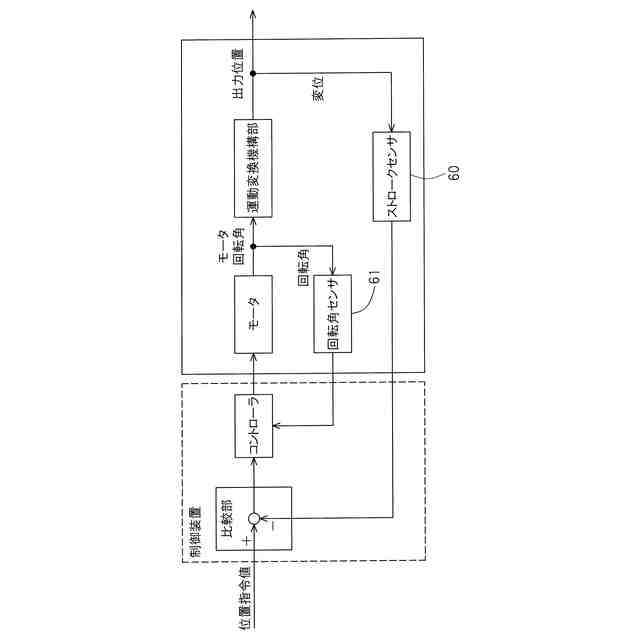
図8のように、従来技術では、モータの回転とアクチュエータの出力位置を制御するために、ストロークセンサ60と回転角センサ61の両方を用いたフィードバック制御を提案している(特許文献1)が、制御方式については示されていない。
【先行技術文献】
【特許文献】
【0004】
特開2017-207182号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一般に、ブラシ付きモータを使用する直動アクチュエータの出力軸位置を制御するフィードバック制御システムでは、ストロークセンサが使用される。これは、ストロークセンサの設置スペースが限られている、またはストロークセンサの使用が不可能な用途では、大きな課題となる。さらに、微細な位置制御を実現するためには、高分解能のストロークセンサが必要となり、全体コストの大幅な上昇に繋がる。
【0006】
本発明の目的は、設置スペースの低減および設計の自由度の向上を図り、コスト低減を図ると共に制御システムの精度を高めることができる直動アクチュエータを提供することである。
【課題を解決するための手段】
【0007】
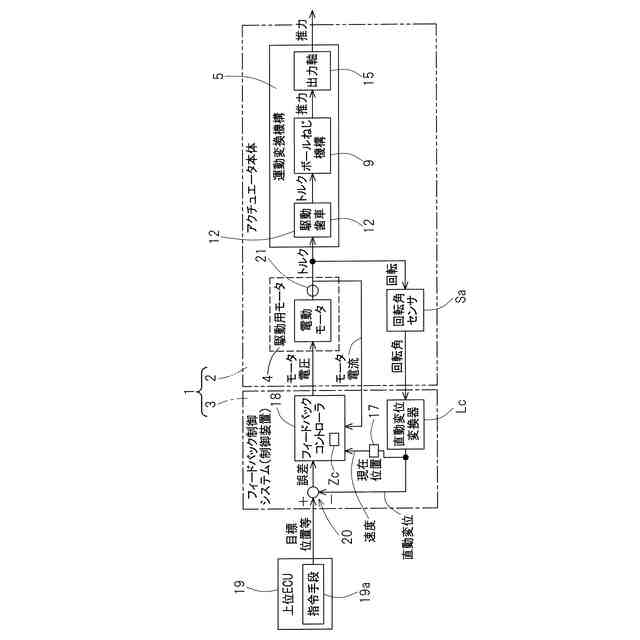
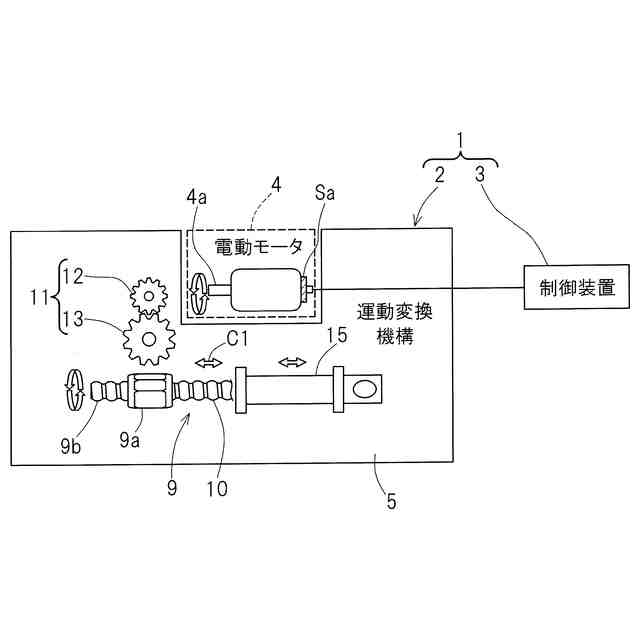
本発明の直動アクチュエータ1は、電動モータ4と、この電動モータ4の回転運動を直線運動に変換する運動変換機構5と、前記電動モータ4の回転角を検出する回転角センサSaと、前記電動モータ4を制御する制御装置3とを備えた直動アクチュエータであって、
前記制御装置3は、
前記回転角センサSaで検出された回転角を、前記運動変換機構5の直動変位に変換する直動変位変換器Lcと、
前記直動変位の初期位置であるゼロ点を補正するゼロ点補正機構Zcと、を有し、
前記直動変位変換器Lcで変換された直動変位を用いて、前記電動モータ4を制御する。
【0008】
この構成によると、回転角センサSaは、通常、モータ回転軸上またはモータ回転軸上近傍に直接組み込むことができるため、従来技術の直動アクチュエータよりも設置スペースの低減を図れる。ストロークセンサなしで直動変位を間接的に決定する代替方法を提供することで、直動アクチュエータ1の設計の自由度を高めることができる。ストロークセンサと同じコスト帯の回転角センサSaは、ストロークセンサよりも分解能が高いため、制御システムの精度が優れている。したがって、回転角センサSaのみを使用することで、低コストを維持しながら、高分解能により制御システムの精度を高めることができる。
【0009】
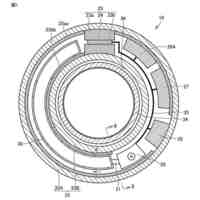
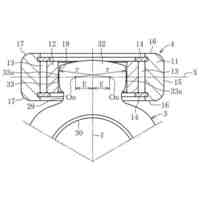
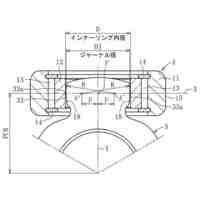
前記運動変換機構5は、前記電動モータ4の回転を減速する減速機11と、この減速機11の回転出力を直線運動に変換する直動機構9とを有してもよい。この場合、電動モータ4と直動機構9との間に減速機11を介在させることで、比較的小型の電動モータ4であっても、所望のトルクを出力することが可能となる。この構成によると、減速機が設けられていない直動アクチュエータよりも電動モータ4を小型化できるため、直動アクチュエータ全体の小型化、軽量化を図ることが可能となる。
【0010】
前記制御装置3は、与えられた目標位置に対して、前記直動変位をフィードバック制御してもよい。この場合、実測値である直動変位と目標位置との間の不一致を最小限に抑えることが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
NTN株式会社
玉軸受
1か月前
NTN株式会社
玉軸受
4日前
NTN株式会社
玉軸受
3日前
NTN株式会社
軸受装置
2日前
NTN株式会社
密封装置
20日前
NTN株式会社
転がり軸受
1か月前
NTN株式会社
深溝玉軸受
20日前
NTN株式会社
転がり軸受
25日前
NTN株式会社
転がり軸受
1か月前
NTN株式会社
円筒ころ軸受
4日前
NTN株式会社
球面滑り軸受
23日前
NTN株式会社
軸受用保持器
16日前
NTN株式会社
基板取付構造
2日前
NTN株式会社
等速自在継手
2日前
NTN株式会社
円筒ころ軸受
1か月前
NTN株式会社
絶縁転がり軸受
18日前
NTN株式会社
車輪用軸受装置
19日前
NTN株式会社
車輪用軸受装置
1か月前
NTN株式会社
車輪用軸受装置
26日前
NTN株式会社
車輪用軸受装置
4日前
NTN株式会社
電動モータ装置
4日前
NTN株式会社
プランマブロック
2日前
NTN株式会社
動力伝達シャフト
2日前
NTN株式会社
摺動式等速自在継手
2日前
NTN株式会社
摺動式等速自在継手
2日前
NTN株式会社
直動アクチュエータ
2日前
NTN株式会社
直動アクチュエータ
3日前
NTN株式会社
保持器付き針状ころ
1か月前
NTN株式会社
ラジアルフォイル軸受
18日前
NTN株式会社
循環式トイレユニット
12日前
NTN株式会社
軸受装置および機械装置
2日前
NTN株式会社
転がり軸受及び回転機械
2日前
NTN株式会社
トリポード型等速自在継手
4日前
NTN株式会社
トリポード型等速自在継手
4日前
NTN株式会社
算出装置、および算出方法
19日前
NTN株式会社
通電ユニットおよび軸受ユニット
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ