TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025136547
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024035200
出願日
2024-03-07
発明の名称
ブラシ付モータ回転数検出装置、ブラシ付モータ制御装置、駆動装置。及びブラシ付モータ回転数計測方法
出願人
ローム株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
H02P
7/06 20060101AFI20250911BHJP(電力の発電,変換,配電)
要約
【課題】本開示は、ブラシ付モータの回転数を簡易な構成により検出することを可能とすることを目的とする。
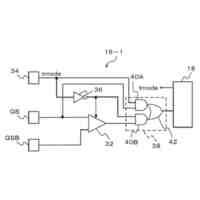
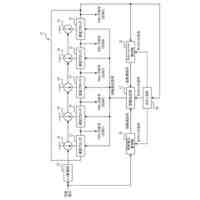
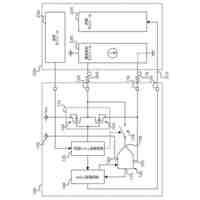
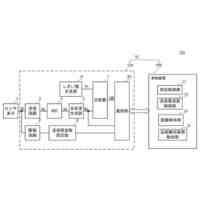
【解決手段】モータ回転数検出装置14は、モータ80に流れる電流値を計測する計測部22と、計測部22が計測した電流値の経時的な変化である経時変化データを記憶する記憶部26と、経時変化データから予め定められた時間単位で移動平均データを算出する算出部30と、移動平均データに予め定められた偏差量Bを加算して、閾値データを算出する加算部32と、経時変化データの値が閾値データの値よりも大となる時期に基づいて、モータ80の回転数を導出する導出部40と、を備える。
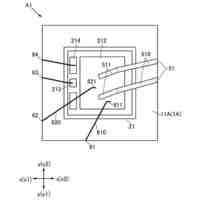
【選択図】図1
特許請求の範囲
【請求項1】
ブラシ付モータに流れる電流値を計測する計測部と、
前記計測部が計測した電流値の経時的な変化である経時変化データを記憶する記憶部と、
前記経時変化データから予め定められた時間単位で移動平均データを算出する算出部と、
前記移動平均データに予め定められた偏差量を加算して、閾値データを算出する加算部と、
前記経時変化データの値が前記閾値データの値よりも大となる時期に基づいて、ブラシ付モータの回転数を導出する導出部と、
を備える、ブラシ付モータ回転数検出装置。
続きを表示(約 810 文字)
【請求項2】
前記算出部は、前記計測部が計測した電流値に対応して前記予め定められた時間単位を変更する、
請求項1に記載の、ブラシ付モータ回転数検出装置。
【請求項3】
前記算出部は、前記計測部が計測した電流値が予め定められた閾値よりも小さい場合に、前記予め定められた時間単位を大きくする、
請求項2に記載の、ブラシ付モータ回転数検出装置。
【請求項4】
前記加算部は、前記計測部が計測した電流値に対応して前記予め定められた偏差量を変更する、
請求項1に記載の、ブラシ付モータ回転数検出装置。
【請求項5】
前記加算部は、前記計測部が計測した電流値が予め定められた閾値よりも小さい場合に、前記予め定められた偏差量を小さくする、
請求項4に記載の、ブラシ付モータ回転数検出装置。
【請求項6】
請求項1から請求項5のいずれか一項に記載のブラシ付モータ回転数検出装置と、
前記導出部が導出したブラシ付モータの回転数に基づいて、ブラシ付モータを制御する制御部と、
を備える、ブラシ付モータ制御装置。
【請求項7】
請求項6に記載のブラシ付モータ制御装置と、
移動対象物を移動させるブラシ付モータと、
を備える、駆動装置。
【請求項8】
ブラシ付モータに流れる電流値を計測して経時的な変化である経時変化データを記憶し、
前記経時変化データから予め定められた時間単位で移動平均を算出して移動平均データを算出し、
前記移動平均データに予め定められた偏差量を加算して閾値データを算出し、
前記経時変化データの値が前記閾値データの値よりも大となる回数に基づいて、ブラシ付モータの回転数を導出する、
ブラシ付モータ回転数計測方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ブラシ付モータ回転数検出装置、ブラシ付モータ制御装置、駆動装置。及びブラシ付モータ回転数計測方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
例えば特許文献1には、永久磁石を有する回転子と、この回転子を回転させる回転磁界を発生する複数相の固定子巻線を有する固定子とを備えたブラシレスDCモータを、複数のスイッチング素子からなり固定子巻線への通電を順次転流させる通電切換手段により回転駆動させるブラシレスDCモータの制御装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2002-252995号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、ブラシ付モータの回転数を簡易な構成により検出することを可能とすることを目的とする。
【課題を解決するための手段】
【0005】
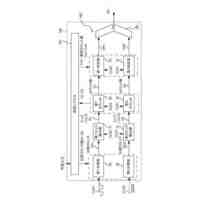
本開示のブラシ付モータ回転数検出装置は、ブラシ付モータに流れる電流値を計測する計測部と、前記計測部が計測した電流値の経時的な変化である経時変化データを記憶する記憶部と、前記経時変化データから予め定められた時間単位で移動平均データを算出する算出部と、前記移動平均データに予め定められた偏差量を加算して、閾値データを算出する加算部と、前記経時変化データの値が前記閾値データの値よりも大となる時期に基づいて、ブラシ付モータの回転数を導出する導出部と、を備える。
【0006】
このブラシ付モータ回転数検出装置は、ブラシ付モータに流れる電流値を計測して得られた経時変化データから順次算出して得られた閾値データに基づいて、ブラシ付モータの回転数を導出する。すなわち、この態様に係るブラシ付モータ回転数検出装置によれば、ブラシ付モータの回転数を、ブラシ付モータに流れる電流値から算出するため、ホールICのないブラシ付モータの回転数を検出することができる。これにより、この態様に係るブラシ付モータ回転数検出装置によれば、ブラシ付モータの回転数を簡易な構成により検出することが可能となる。
【発明の効果】
【0007】
本開示によれば、ブラシ付モータの回転数を簡易な構成により検出することが可能となる。
【図面の簡単な説明】
【0008】
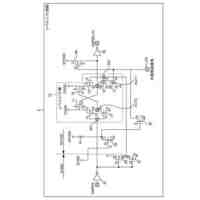
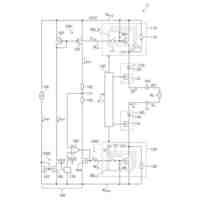
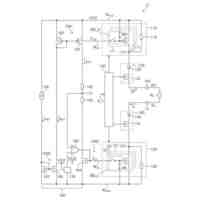
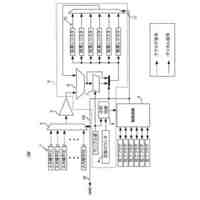
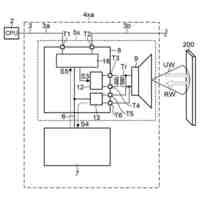
本開示の実施形態に係る駆動装置を説明する図である。
本開示の実施形態に係る駆動装置におけるブラシ付モータが回転を始める場合の電流波形を示す図である。
図2の電流波形から、移動平均データを算出した様子を示す図である。
図3の移動平均データで示される値に偏差量を加えて作成された閾値データを算出した様子を示す図である。
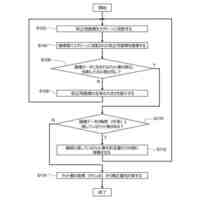
図1に示される電流波形が図4に示される閾値データを上回った時期に基づいて、パルスデータを算出する様子を示す図である。
実施形態に係る移動平均データを示す図であり、電流値に応じてサンプリング数を変化させる様子を示す図である。
実施形態に係る閾値データを示す図であり、ブラシ付モータの回転が安定することによりリップルが減少した様子を示す図である。
図7の閾値データを示す図であり、偏差量を変化させた様子を示す図である。
【発明を実施するための形態】
【0009】
以下、本開示の実施形態の一例を、図面を参照しつつ説明する。なお、各図面において、同一又は等価な構成要素及び部品には同一の参照符号を付与している。また、図面の寸法比率は、説明の都合上誇張されており、実際の比率とは異なる場合がある。
【0010】
なお、以後の説明では、ブラシ付モータを、単に「モータ」と称し、ブラシ付であることを前提として説明する。また、ブラシ付モータ回転数を、単に「モータ回転数」と称すように、他の語句についても同様とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ローム株式会社
発振回路
19日前
ローム株式会社
入出力回路
16日前
ローム株式会社
半導体装置
6日前
ローム株式会社
基準電圧源
16日前
ローム株式会社
圧電共振器
16日前
ローム株式会社
半導体装置
14日前
ローム株式会社
半導体装置
15日前
ローム株式会社
半導体装置
14日前
ローム株式会社
半導体装置
14日前
ローム株式会社
半導体装置
5日前
ローム株式会社
信号出力回路
5日前
ローム株式会社
信号出力回路
5日前
ローム株式会社
定電圧生成回路
5日前
ローム株式会社
半導体集積回路
6日前
ローム株式会社
電圧制御発振器
15日前
ローム株式会社
MEMSセンサ
15日前
ローム株式会社
窒化物半導体装置
19日前
ローム株式会社
窒化物半導体装置
13日前
ローム株式会社
差動回路及び発振器
7日前
ローム株式会社
半導体集積回路装置
13日前
ローム株式会社
半導体装置および車両
6日前
ローム株式会社
アナログデジタル変換装置
13日前
ローム株式会社
半導体素子および半導体装置
7日前
ローム株式会社
ソースドライバ及び表示装置
6日前
ローム株式会社
表示装置及びソースドライバ
6日前
ローム株式会社
差動アンプおよび半導体装置
5日前
ローム株式会社
半導体装置、電子機器、車両
6日前
ローム株式会社
ソースドライバ及び表示装置
14日前
ローム株式会社
出力画像調整装置及び投影装置
7日前
ローム株式会社
バッテリマネージメントシステム
13日前
ローム株式会社
半導体装置及びデータ読み書き方法
16日前
ローム株式会社
超音波システムおよびこれを備えた車両
15日前
ローム株式会社
半導体装置および半導体装置の製造方法
5日前
ローム株式会社
半導体装置および半導体装置の製造方法
5日前
ローム株式会社
信号処理装置、超音波センサ、および車両
14日前
ローム株式会社
周波数監視回路及び周波数監視プログラム
14日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ