TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025136185
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024034434
出願日
2024-03-06
発明の名称
給餌機への飼料補給システム、方法及びプログラム
出願人
SkyDeer株式会社
代理人
個人
主分類
A01K
61/80 20170101AFI20250911BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】人手によらず自動で給餌機に飼料を補給するための補給システムを提供する。
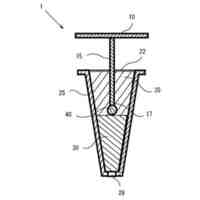
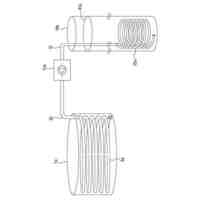
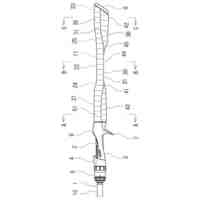
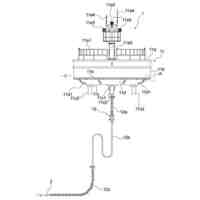
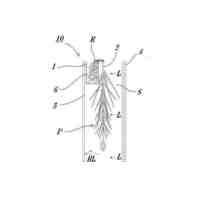
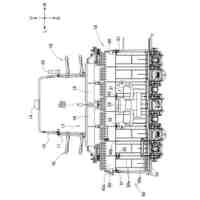
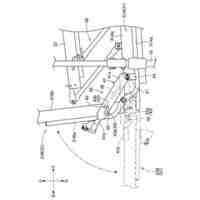
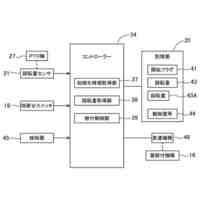
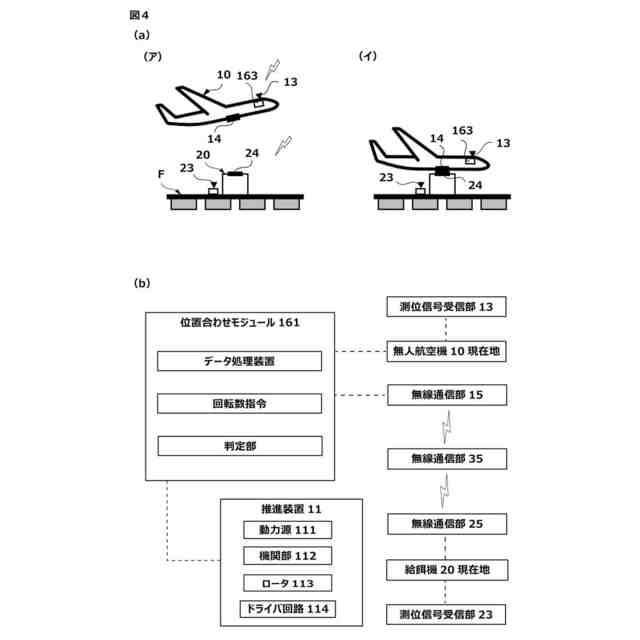
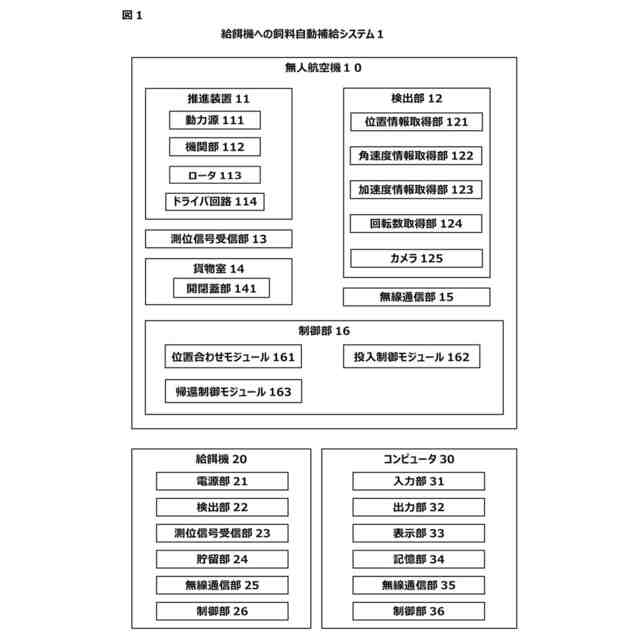
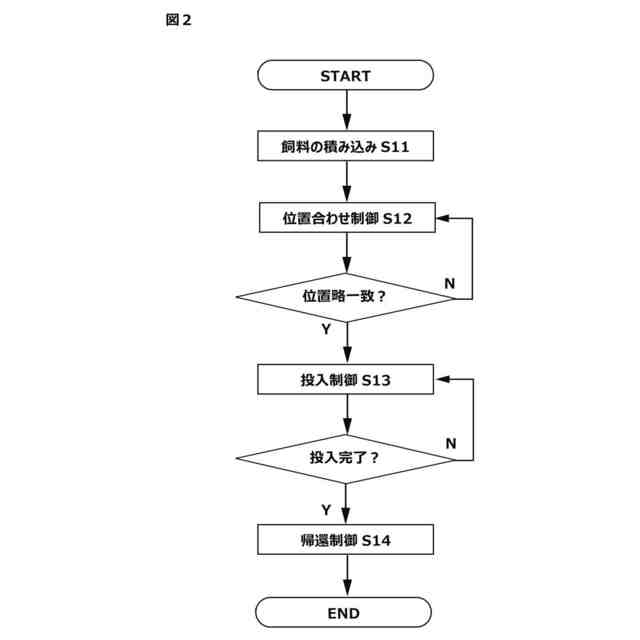
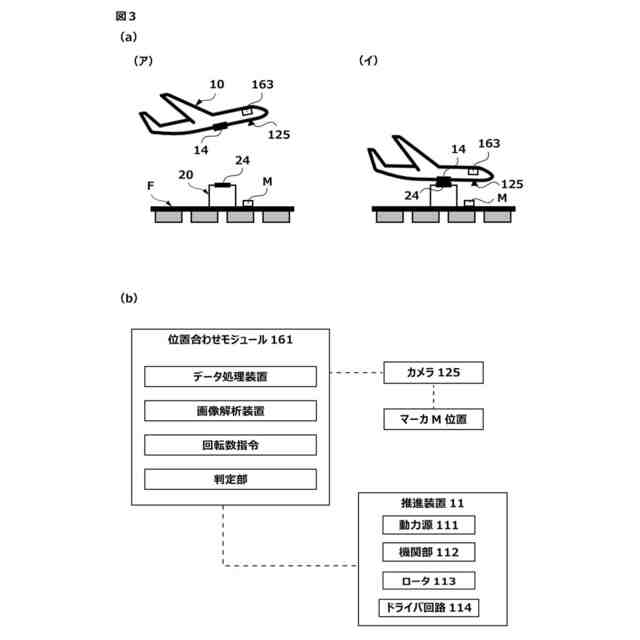
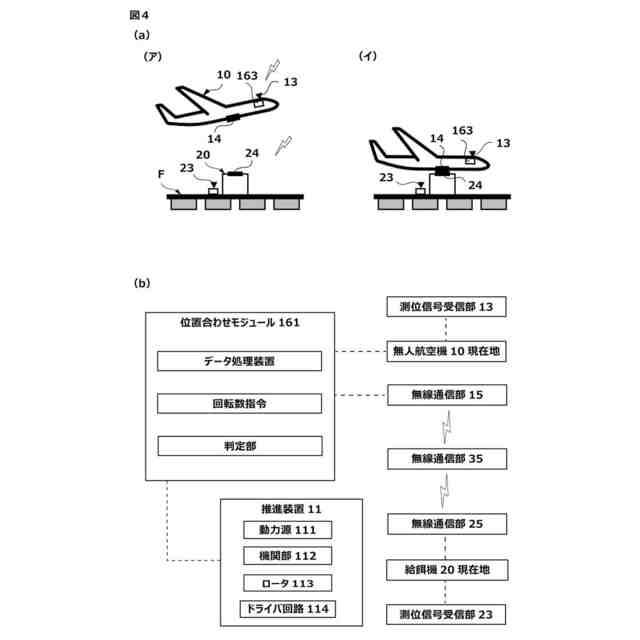
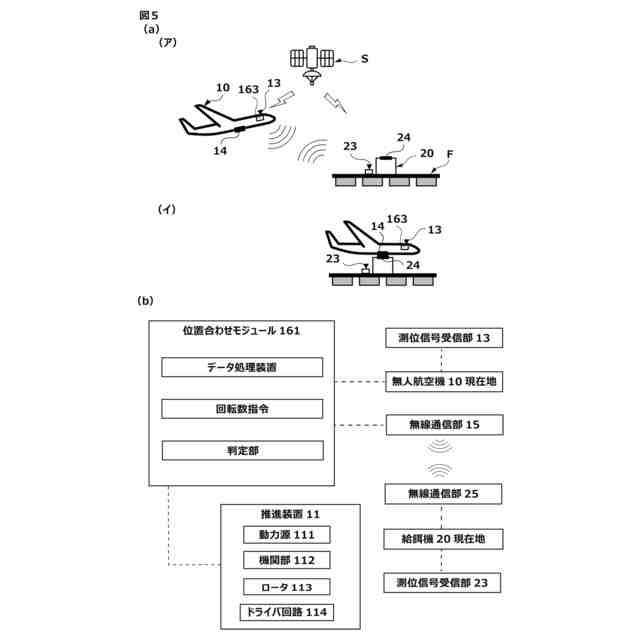
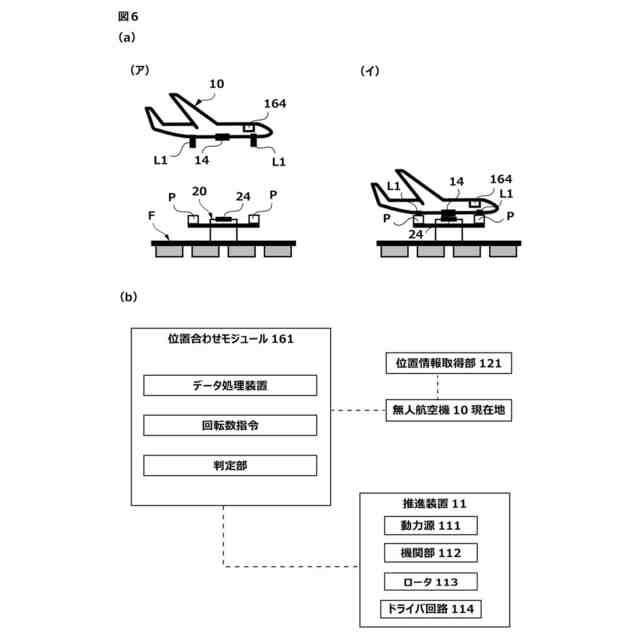
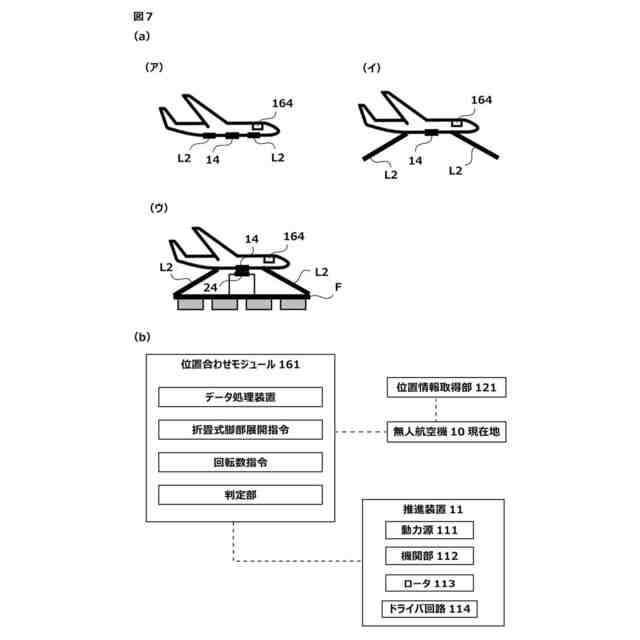
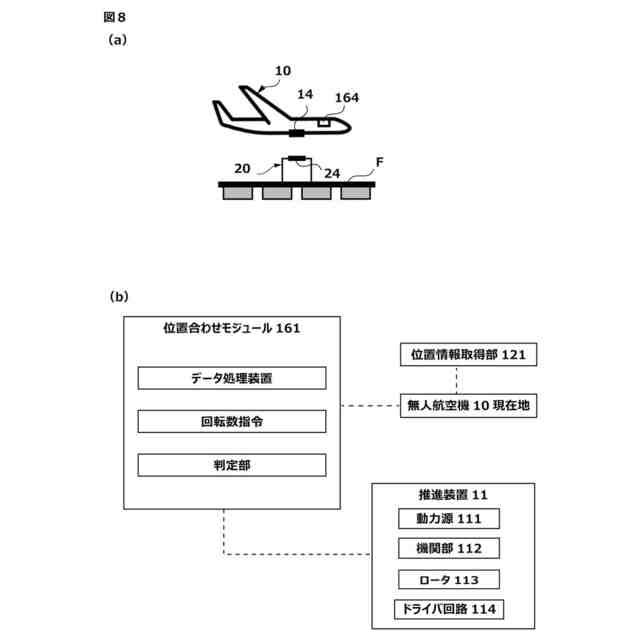
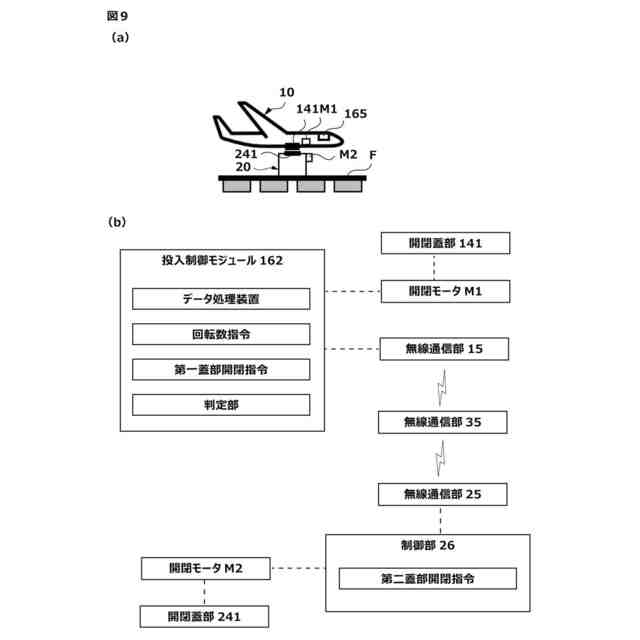
【解決手段】本発明の給餌機への飼料補給システム1は、飼料を積載し第一開閉蓋部を開状態とすることで当該飼料を放出可能な貨物室を備え水平航行、垂直航行及びその組み合わせによる航行が可能な無人航空機を用いて、給餌対象となる生簀に設置され第二開閉蓋部を開状態とすることで飼料を受け入れ可能な貯留部を備える給餌機に飼料を補給する給餌機への飼料補給システムであって、無人航空機と給餌機との相対的な位置情報を取得する相対位置情報取得手段と、相対的な位置情報に基づいて無人航空機の位置を給餌機の位置に略一致するよう位置合わせする位置合わせ制御手段と、第一開閉蓋部及び第二開閉蓋部の開閉を制御する投入制御手段とを備える。
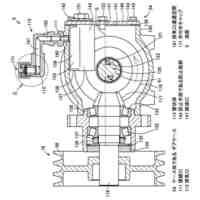
【選択図】図4
特許請求の範囲
【請求項1】
飼料を積載し第一開閉蓋部を開状態とすることで当該飼料を放出可能な貨物室を備え水平航行、垂直航行及びその組み合わせによる航行が可能な無人航空機を用いて、給餌対象となる生簀に設置され第二開閉蓋部を開状態とすることで飼料を受け入れ可能な貯留部を備える給餌機に飼料を補給する給餌機への飼料補給システムであって、
前記無人航空機と前記給餌機との相対的な位置情報を取得する相対位置情報取得手段と、
前記相対的な位置情報に基づいて前記無人航空機の位置を前記給餌機の位置に略一致するよう位置合わせする位置合わせ制御手段と、
前記第一開閉蓋部及び前記第二開閉蓋部の開閉を制御する投入制御手段とを備える、
給餌機への飼料補給システム。
続きを表示(約 790 文字)
【請求項2】
前記相対的な位置情報は、
前記無人航空機の位置情報を取得する第一位置情報取得手段と、
前記給餌機の位置情報を取得する第二位置情報取得手段と、
によって取得された位置情報に基づいて特定される、
請求項1に記載の給餌機への飼料補給システム。
【請求項3】
飼料を積載し第一開閉蓋部を開状態とすることで当該飼料を放出可能な貨物室を備え水平航行、垂直航行及びその組み合わせによる航行が可能な無人航空機を用いて、給餌対象となる生簀に設置され第二開閉蓋部を開状態とすることで飼料を受け入れ可能な貯留部を備える給餌機に飼料を補給する給餌機への飼料補給方法であって、
前記無人航空機と前記給餌機との相対的な位置情報を取得するステップと、
前記相対的な位置情報に基づいて前記無人航空機の位置を前記給餌機の位置に略一致するよう位置合わせするステップと、
前記前記第一開閉蓋部及び第二開閉蓋部の開閉を制御するステップとを備える、
給餌機への飼料補給方法。
【請求項4】
飼料を積載し第一開閉蓋部を開状態とすることで当該飼料を放出可能な貨物室を備え水平航行、垂直航行及びその組み合わせによる航行が可能な無人航空機を用いて、給餌対象となる生簀に設置され第二開閉蓋部を開状態とすることで飼料を受け入れ可能な貯留部を備える給餌機に飼料を補給する給餌機への飼料補給システムに、
前記無人航空機と前記給餌機との相対的な位置情報を取得するステップと、
前記相対的な位置情報に基づいて前記無人航空機の位置を前記給餌機の位置に略一致するよう位置合わせするステップと、
前記前記第一開閉蓋部及び第二開閉蓋部の開閉を制御するステップと、
を実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、生簀における給餌機への飼料補給システム、方法及びプログラムに関するものであり、特に、人手によらず給餌機に飼料を自動で補給するための技術に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
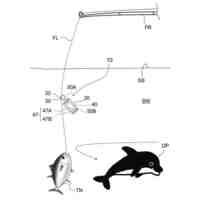
洋上において魚を養殖するために、生簀を用いて育成する場合、魚の育成に必要な餌となる飼料を定期的に生簀内に供給する必要がある。生簀に一度に大量に飼料を供給すると、余剰飼料が発生し水質が悪化する恐れがあり、また、供給量が少ないと育成不足などの恐れもあることから、生簀内における魚の数や成長度合い、及び、魚の食欲等に応じて、適正な飼料を供給する必要がある。
【0003】
生簀に飼料を供給するための最も単純な方法は、船で生簀に近づき船上から生簀内に散布する方法である。この方法では、生簀の状況を視認したうえで必要量の飼料を適時に供給することが可能である。しかしながら、生簀の状況を視認したうえで船上から飼料を散布する方法は、人手に依存するところが大きく、一次産業における人手不足が叫ばれる現代においては、特に複数の生簀で多量の魚を養殖する場合、困難になりつつある。
【0004】
また、飼料を散布して生簀内に供給する方式の場合、食いつきがよくなく、余剰の飼料が発生するという問題もあった。
【0005】
そこで、人手不足の問題と飼料の散布に伴う問題を同時に解決するものとして、飼料を生簀内に供給するために生簀に設置する無人の給餌機が開発されている(特許文献1)。
【0006】
特許文献1に記載されているような無人の給餌機は、飼料を貯留する貯留タンクと、生簀内の状況を検知する検知手段と、基地局との無線通信手段とを備える。そして、検知手段で検知した生簀内の情報を基地局に送信するとともに、基地局からの指令に基づいて適宜のタイミングで適宜の量の飼料を生簀内に放出する。
【0007】
特許文献1に記載の給餌機によると、人手によらず生簀内の状況を検知することができるとともに、検知した生簀内の状況に応じて適切な量の飼料を生簀内に供給することが可能となる。
【0008】
しかしながら、特許文献1に開示されるような給餌機であっても、貯留タンクへの飼料の補給は人手によって行わなければならない。つまり、地上に設置される倉庫から洋上の給餌機まで飼料を運搬し、貯留タンクに補給するという作業のための人手が必要となるという課題があった。しかも、生簀が複数設置される養殖場においては、生簀ごとに給餌機が設置されるため、それぞれの給餌機に飼料を補給する必要があり、結局のところ、飼料の補給のための労力がかかってしまうという課題があった。なお、このような課題は、特許文献1に示す無人給餌機だけでなく、人手によって給餌を行う給餌機においても同様である。
【先行技術文献】
【特許文献】
【0009】
特許第7232471号
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明はこのような課題に鑑みてなされたものであり、人手によらず自動で給餌機に飼料を補給するための補給システムを提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
播種装置
1か月前
個人
巻糸係止具
12日前
個人
飼育容器
1日前
個人
植物栽培用培地
23日前
個人
虫の生け捕り具
1か月前
個人
植木鉢用台
19日前
個人
釣り仕掛け処理具
18日前
個人
養殖システム
1か月前
株式会社シマノ
釣竿
1か月前
岡部株式会社
浮魚礁
1か月前
井関農機株式会社
作業車両
1か月前
個人
水耕栽培システム
1日前
井関農機株式会社
圃場作業機
12日前
井関農機株式会社
収穫作業車両
1か月前
個人
苔玉スタンド
19日前
井関農機株式会社
作業車両
1日前
中国電力株式会社
巣撤去具
29日前
個人
漁業支援装置及び方法
1か月前
株式会社シマノ
ルアー
24日前
個人
妻面トラス梁付き園芸用ハウス
3日前
松山株式会社
農作業機
19日前
松山株式会社
農作業機
19日前
松山株式会社
農作業機
1日前
ウエダ産業株式会社
切断装置
1か月前
松山株式会社
農作業機
19日前
みのる産業株式会社
苗植付装置
16日前
みのる産業株式会社
苗植付装置
16日前
個人
給水方法及びこれを用いた給水装置
17日前
第一衛材株式会社
ペット用おむつ
29日前
株式会社クボタ
田植機
12日前
株式会社クボタ
田植機
12日前
一般社団法人NAGOYA
電子機器
16日前
株式会社クボタ
作業機
11日前
株式会社クボタ
田植機
15日前
OTIS株式会社
ルアー用スカート
1か月前
トヨタ自動車株式会社
植物栽培装置
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ