TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133598
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2024031636
出願日
2024-03-01
発明の名称
走行制御システム、走行制御装置、走行制御方法、走行制御プログラム
出願人
株式会社デンソー
代理人
個人
,
個人
主分類
G08G
1/00 20060101AFI20250904BHJP(信号)
要約
【課題】車両ごとの加速性能に応じた隊列走行を実現可能な走行制御システム等を提供する。
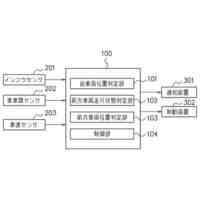
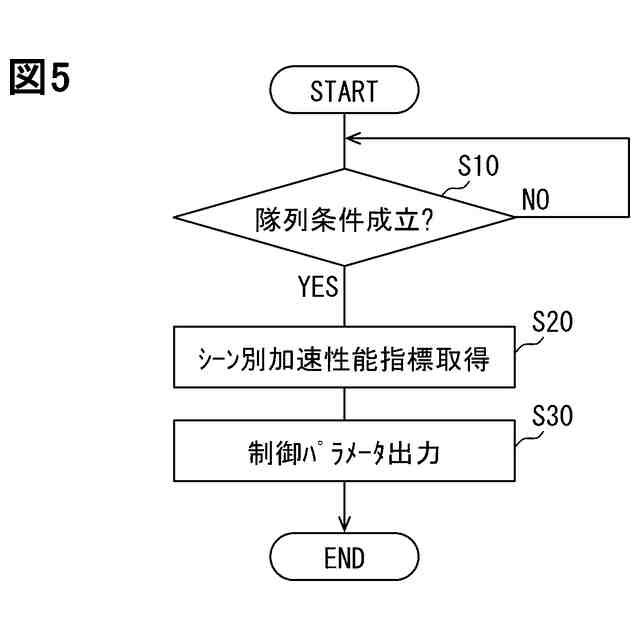
【解決手段】走行制御システムは、プロセッサを有し、自律走行可能な複数の自律車両の走行を制御する。プロセッサは、複数の自律車両により隊列を組む隊列条件の成立を監視することを実行するように構成される。プロセッサは、隊列条件の成立状態において、各自律車両の車両構成に相関する基本加速性能指標が時系列に補正されたシーン別加速性能指標を取得することを実行するように構成される。シーン別加速性能指標は、走行シーン別の走行環境と隊列を組む自律車両同士の前後相関とにマッチングする指標である。シーン別加速性能指標を取得することを実行するように構成される。プロセッサは、シーン別加速性能指標に相関する各自律車両の制御パラメータを出力することを実行するように構成される。
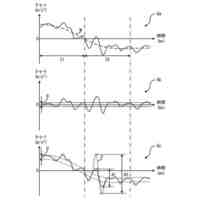
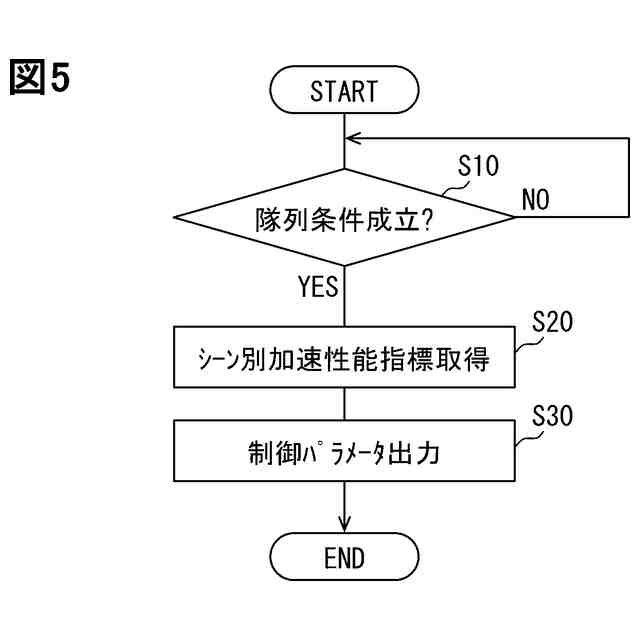
【選択図】図5
特許請求の範囲
【請求項1】
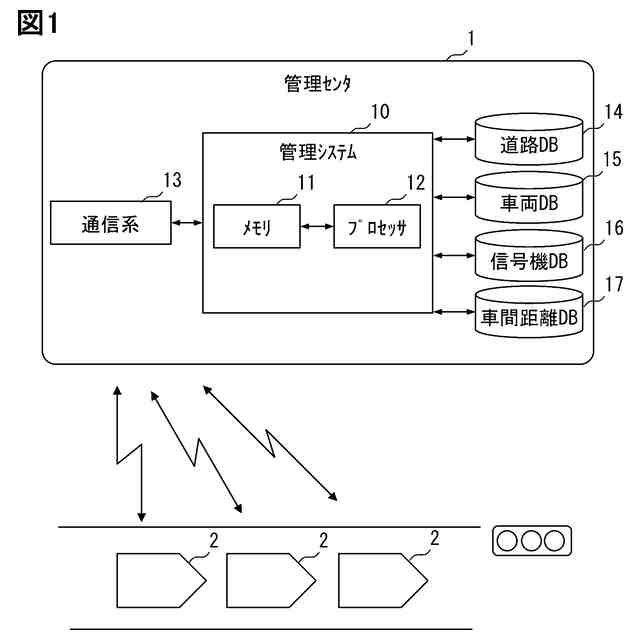
プロセッサ(12)を有し、自律走行可能な複数の自律車両(2)の走行を制御する走行制御システムであって、
前記プロセッサは、
複数の前記自律車両により隊列を組む隊列条件の成立を監視することと、
前記隊列条件の成立状態において、各前記自律車両の車両構成に相関する基本加速性能指標が時系列に補正された、走行シーン別の走行環境と前記隊列を組む前記自律車両同士の前後相関とにマッチングするシーン別加速性能指標を取得することと、
前記シーン別加速性能指標に相関する各前記自律車両の制御パラメータを出力することと、
を実行するように構成される走行制御システム。
続きを表示(約 1,800 文字)
【請求項2】
前記シーン別加速性能指標を取得することは、
前記基本加速性能指標が前記走行環境とのマッチングにより補正された環境別加速性能指標が、さらに前記前後相関とのマッチングにより補正された前記シーン別加速性能指標を、取得することを含む請求項1に記載の走行制御システム。
【請求項3】
前記シーン別加速性能指標を取得することは、
前記隊列を組む各前記自律車両のうち前後のペアに注目した場合に、前記環境別加速性能指標が後方車両において前方車両よりも高い場合、前記後方車両について前記前方車両と共通化された前記シーン別加速性能指標を取得することを含む請求項2に記載の走行制御システム。
【請求項4】
前記シーン別加速性能指標を取得することは、
前記隊列を組む各前記自律車両のうち前後のペアに注目した場合に、前記環境別加速性能指標が後方車両において前方車両よりも高い場合、前記後方車両について前記前方車両よりも低く補正された前記シーン別加速性能指標を取得することを含む請求項2に記載の走行制御システム。
【請求項5】
前記シーン別加速性能指標を取得することは、
前記隊列を組む各前記自律車両のうち前後のペアに注目した場合に、前記環境別加速性能指標が後方車両において前方車両よりも高い場合、前記前方車両との車間距離が設定距離範囲外の前記後方車両について、前記前方車両よりも高く補正された前記シーン別加速性能指標を取得することを含む請求項2に記載の走行制御システム。
【請求項6】
前記シーン別加速性能指標を取得することは、
前記隊列を分割する分割条件の成立状態において、分割後の後方隊列における先頭車両について、分割要因に対するマッチングにより補正された前記シーン別加速性能指標を取得することを含む請求項1に記載の走行制御システム。
【請求項7】
前記隊列条件の成立を監視することは、
走行レーン毎の複数の前記自律車両について前記隊列条件の成立を監視することを含む請求項1に記載の走行制御システム。
【請求項8】
プロセッサ(12)を有し、自律走行可能な自律車両(2)に搭載可能に構成され、複数の前記自律車両の走行を制御する走行制御装置であって、
前記プロセッサは、
複数の前記自律車両により隊列を組む隊列条件の成立を監視することと、
前記隊列条件の成立状態において、各前記自律車両の車両構成に相関する基本加速性能指標が時系列に補正された、走行シーン別の走行環境と前記隊列を組む前記自律車両同士の前後相関とにマッチングするシーン別加速性能指標を取得することと、
前記シーン別加速性能指標に相関する各前記自律車両の制御パラメータを出力することと、
を実行するように構成される走行制御装置。
【請求項9】
自律走行可能な複数の自律車両(2)の走行を制御するために、プロセッサ(12)により実行される走行制御方法であって、
複数の前記自律車両により隊列を組む隊列条件の成立を監視することと、
前記隊列条件の成立状態において、各前記自律車両の車両構成に相関する基本加速性能指標が時系列に補正された、走行シーン別の走行環境と前記隊列を組む前記自律車両同士の前後相関とにマッチングするシーン別加速性能指標を取得することと、
前記シーン別加速性能指標に相関する各前記自律車両の制御パラメータを出力することと、
を含む走行制御方法。
【請求項10】
自律走行可能な複数の自律車両(2)の走行を制御するために記憶媒体(11)に記憶され、プロセッサ(12)に実行させる命令を含む走行制御プログラムであって、
前記命令は、
複数の前記自律車両により隊列を組む隊列条件の成立を監視させることと、
前記隊列条件の成立状態において、各前記自律車両の車両構成に相関する基本加速性能指標が時系列に補正された、走行シーン別の走行環境と前記隊列を組む前記自律車両同士の前後相関とにマッチングするシーン別加速性能指標を取得させることと、
前記シーン別加速性能指標に相関する各前記自律車両の制御パラメータを出力させることと、
を含む走行制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、複数の自律車両の走行を制御する走行制御技術に、関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、隊列を組んで走行するように複数の自動運転車両を制御する車両制御システムが開示されている。この車両制御システムは、同一の目標加速度で走行するように複数の車両を制御する隊列走行制御を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2022-2911号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、車両の加速性能は、隊列を組む各車両間にて異なる場合がある。一方で、特許文献1に開示の技術では、車両ごとの加速性能が考慮されておらず、単に全ての車両に同一の目標加速度を設定するのみである。この場合、車両ごとの加速性能の違いに応じた実加速度のばらつきを考慮した車間距離の調整が困難となり得る。したがって、特許文献1に開示の技術では、車両ごとの加速性能に応じた隊列走行を実現することが困難になる虞がある。
【0005】
本開示の課題は、車両ごとの加速性能に応じた隊列走行を実現可能な走行制御システムを、提供することにある。本開示の別の課題は、車両ごとの加速性能に応じた隊列走行を実現可能な走行制御装置を、提供することにある。本開示の又別の課題は、車両ごとの加速性能に応じた隊列走行を実現可能な走行制御方法を、提供することにある。本開示のさらに別の課題は、車両ごとの加速性能に応じた隊列走行を実現可能な走行制御プログラムを、提供することにある。
【課題を解決するための手段】
【0006】
以下、課題を解決するための本開示の技術的手段について、説明する。尚、特許請求の範囲及び本欄に記載された括弧内の符号は、後に詳述する実施形態に記載された具体的手段との対応関係を示すものであり、本開示の技術的範囲を限定するものではない。
【0007】
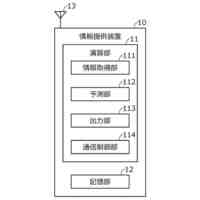
本開示の第一態様は、プロセッサ(12)を有し、自律走行可能な複数の自律車両(2)の走行を制御する走行制御システムであって、
プロセッサは、
複数の自律車両により隊列を組む隊列条件の成立を監視することと、
隊列条件の成立状態において、各自律車両の車両構成に相関する基本加速性能指標が時系列に補正された、走行シーン別の走行環境と隊列を組む自律車両同士の前後相関とにマッチングするシーン別加速性能指標を取得することと、
シーン別加速性能指標に相関する各自律車両の制御パラメータを出力することと、
を実行するように構成される。
【0008】
本開示の第二態様は、プロセッサ(12)を有し、自律走行可能な自律車両(2)に搭載可能に構成され、複数の自律車両の走行を制御する走行制御装置であって、
プロセッサは、
複数の自律車両により隊列を組む隊列条件の成立を監視することと、
隊列条件の成立状態において、各自律車両の車両構成に相関する基本加速性能指標が時系列に補正された、走行シーン別の走行環境と隊列を組む自律車両同士の前後相関とにマッチングするシーン別加速性能指標を取得することと、
シーン別加速性能指標に相関する各自律車両の制御パラメータを出力することと、
を実行するように構成される。
【0009】
本開示の第三態様は、自律走行可能な複数の自律車両(2)の走行を制御するために、プロセッサ(12)により実行される走行制御方法であって、
複数の自律車両により隊列を組む隊列条件の成立を監視することと、
隊列条件の成立状態において、各自律車両の車両構成に相関する基本加速性能指標が時系列に補正された、走行シーン別の走行環境と隊列を組む自律車両同士の前後相関とにマッチングするシーン別加速性能指標を取得することと、
シーン別加速性能指標に相関する各自律車両の制御パラメータを出力することと、
を含む。
【0010】
本開示の第四態様は、自律走行可能な複数の自律車両(2)の走行を制御するために記憶媒体(11)に記憶され、プロセッサ(12)に実行させる命令を含む走行制御プログラムであって、
命令は、
複数の自律車両により隊列を組む隊列条件の成立を監視させることと、
隊列条件の成立状態において、各自律車両の車両構成に相関する基本加速性能指標が時系列に補正された、走行シーン別の走行環境と隊列を組む自律車両同士の前後相関とにマッチングするシーン別加速性能指標を取得させることと、
シーン別加速性能指標に相関する各自律車両の制御パラメータを出力させることと、
を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本精機株式会社
路面投影装置
2か月前
日本精機株式会社
警報システム
13日前
スズキ株式会社
運転支援装置
12日前
エムケー精工株式会社
車両誘導装置
19日前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
検知器
6日前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
発信機
1か月前
株式会社国際電気
防災システム
16日前
ニッタン株式会社
発信機
1か月前
個人
防犯に特化したアプリケーション
2か月前
ニッタン株式会社
検知器
4日前
ニッタン株式会社
検知器
4日前
トヨタ自動車株式会社
車両
1か月前
東京都公立大学法人
液滴検出装置
2か月前
TOA株式会社
拡声放送システム
2か月前
個人
乗り物の移動を支援する方法及び装置
2か月前
株式会社アジラ
データ転送システム
2か月前
株式会社小糸製作所
移動体検出装置
6日前
アズビル株式会社
建物管理システム
3か月前
日本信号株式会社
情報提供システム
2か月前
日本信号株式会社
信号情報システム
2か月前
株式会社JVCケンウッド
警報装置
2か月前
株式会社小糸製作所
車両検出システム
6日前
個人
現示内容に関する情報放送機能付き信号機
1か月前
株式会社JVCケンウッド
情報処理装置
3か月前
日本信号株式会社
交通信号制御システム
2か月前
トヨタ自動車株式会社
回避動作判別装置
2か月前
能美防災株式会社
火災感知器
9日前
本田技研工業株式会社
情報提供装置
1か月前
本田技研工業株式会社
情報提供装置
1か月前
株式会社豊田自動織機
制御システム
2か月前
能美防災株式会社
非常伝達装置
12日前
ホーチキ株式会社
火災検出システム
2か月前
本田技研工業株式会社
物体検出装置
25日前
本田技研工業株式会社
運転評価装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ