TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025130906
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028284
出願日
2024-02-28
発明の名称
車両の姿勢角推定装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
40/10 20120101AFI20250902BHJP(車両一般)
要約
【課題】車両が荒れた路面上を走行した場合でも、車両の姿勢を推定することができる。
【解決手段】車両(1)に、カメラを備えたスタートラッカ―(20)と、慣性センサ(21)が搭載されている。車両(1)の姿勢角の変動量が、予め設定された変動量よりも小さいときには、カメラにより星空が撮影されて星空の画像データが生成され、車両(1)の姿勢角の変動量が、予め設定された変動量を超えているときには、カメラによる星空の撮影が中止される。生成された画像データから得られた星の配列と恒星カタログに基づいて車両(1)の姿勢角が推定される。
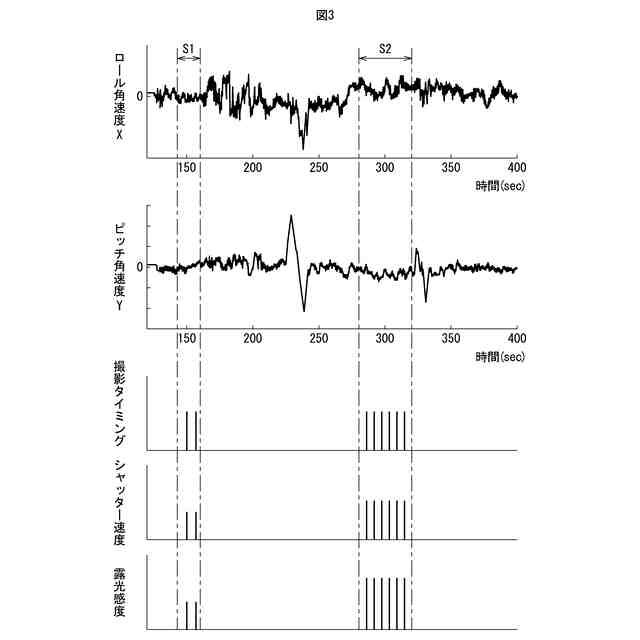
【選択図】図3
特許請求の範囲
【請求項1】
カメラにより撮影された星空の画像データを出力するために車両に搭載されたスタートラッカ―と、車両に搭載された慣性センサと、プロセッサとを具備し、
該プロセッサは、
該慣性センサから出力される角速度信号から車両の姿勢角の変動量を求め、
該車両の姿勢角の変動量が、予め設定された変動量よりも小さいときには、カメラにより星空を撮影して星空の画像データを生成させ、
該車両の姿勢角の変動量が、予め設定された変動量を超えているときには、カメラによる星空の撮影を中止し、
生成された該画像データから得られた星の配列と恒星カタログに基づいて車両の姿勢角を推定する車両の姿勢角推定装置。
続きを表示(約 880 文字)
【請求項2】
該車両の姿勢角の変動量が、該慣性センサにより検出されたロール角速度およびピッチ角速度の双方の変動量から求められる請求項1に記載の車両の姿勢角推定装置。
【請求項3】
該プロセッサは、
該車両の姿勢角の変動量が、予め設定された時間の間、継続的に予め設定された変動量よりも小さいときには、カメラにより星空を撮影して星空の画像データを生成させる請求項1に記載の車両の姿勢角推定装置。
【請求項4】
該予め設定された変動量が、予め設定された第1の変動量と、該予め設定された第1の変動量よりも大きい予め設定された第2の変動量とにより構成し、
該プロセッサは、
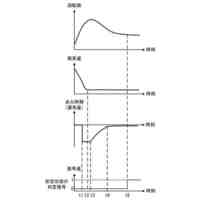
該車両の姿勢角の変動量が、予め設定された第1の変動量未満のときに、カメラにより星空を基準シャッター速度で撮影すると共に基準の露光感度で星空の画像データを生成させ、
該車両の姿勢角の変動量が、該予め設定された第1の変動量以上で該予め設定された第2の変動量以下のときには、カメラにより星空を基準シャッター速度よりも早い速度で撮影すると共に基準の露光感度よりも高い露光感度で星空の画像データを生成させ、
該車両の姿勢角の変動量が、該予め設定された第2の変動量を超えているときに、カメラによる星空の撮影を中止させる請求項1に記載の車両の姿勢角推定装置。
【請求項5】
該プロセッサは、
該車両の姿勢角の変動量が、予め設定された時間の間、継続的に予め設定された第1の変動量未満のときに、カメラにより星空を基準シャッター速度で撮影すると共に基準の露光感度で星空の画像データを生成させ、
該車両の姿勢角の変動量が、予め設定された時間の間、継続的に該予め設定された第1の変動量以上で該予め設定された第2の変動量以下のときには、カメラにより星空を基準シャッター速度よりも早い速度で撮影すると共に基準の露光感度よりも高い露光感度で星空の画像データを生成させる請求項1に記載の車両の姿勢角推定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は車両の姿勢角推定装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
カメラにより撮影された星空の画像データを出力するスタートラッカ―と加速度センサが車両に搭載されており、スタートラッカ―から出力された画像データと加速度センサから得られた情報に基づいて、車両位置を同定するようにした位置同定システムが公知である(例えば特許文献1を参照)。このようにスタートラッカ―を用いると、スタートラッカ―からの出力画像データから取得される星の配列と、予め用意されている恒星カタログとのパターンマッチング処理を行うことにより、スタートラッカ―を搭載した車両等の位置や姿勢を推定可能となる。このスタートラッカ―は、車両等が静止した状態で使用されることが多い。
【先行技術文献】
【特許文献】
【0003】
特開2022-144063号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、砂漠のようなオフロードにおいて車両を高速で走行させる場合、特に夜は、車両の姿勢を正しく認識しづらくなる。この場合、スタートラッカ―を車両に搭載しておくと、このスタートラッカ―により車両の姿勢を推定することが可能となる。ところが、スタートラッカ―を車両に搭載した場合、車両が荒れた路面上を走行し、車体が激しく振動して、車両の姿勢が瞬時で大きく変動し続けると、カメラによって正しく恒星写真を撮影できなくなり、そのため、車両の姿勢を推定することができなくなるという問題がある。
【課題を解決するための手段】
【0005】
このような問題を解決するために、本発明によれば、カメラにより撮影された星空の画像データを出力するために車両に搭載されたスタートラッカ―と、車両に搭載された慣性センサと、プロセッサとを具備し、
プロセッサは、
慣性センサから出力される角速度信号から車両の姿勢角の変動量を求め、
車両の姿勢角の変動量が、予め設定された変動量よりも小さいときには、カメラにより星空を撮影して星空の画像データを生成させ、
車両の姿勢角の変動量が、予め設定された変動量を超えているときには、カメラによる星空の撮影を中止し、
生成された画像データから得られた星の配列と恒星カタログに基づいて車両の姿勢角を推定する車両の姿勢角推定装置が提供される。
【発明の効果】
【0006】
車両が荒れた路面上を走行した場合でも、車両の姿勢を推定することができる。
【図面の簡単な説明】
【0007】
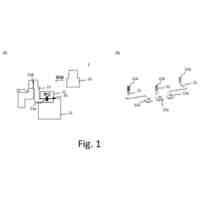
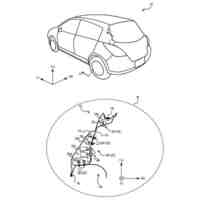
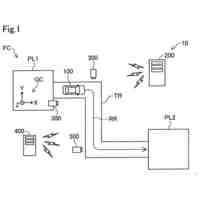
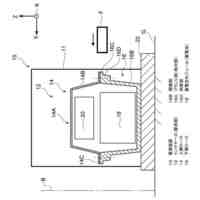
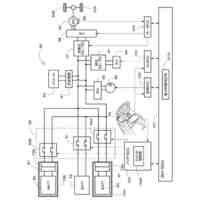
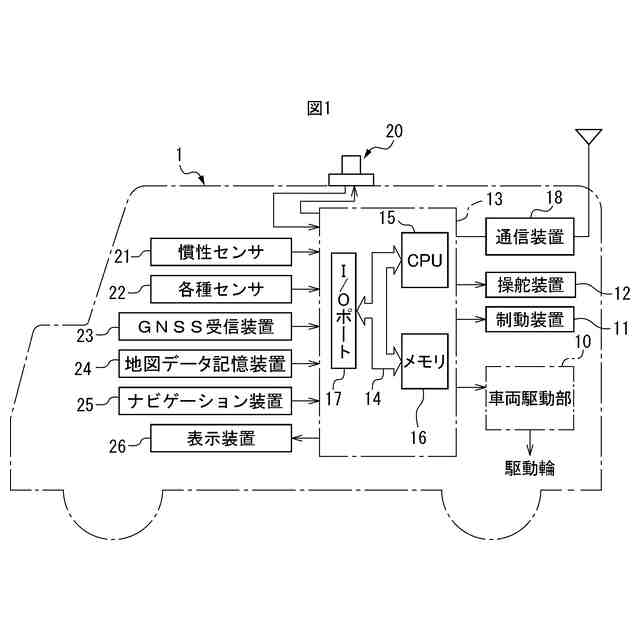
図1は、車両の機能構成を示す図である。
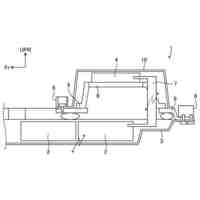
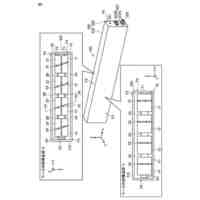
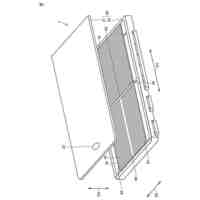
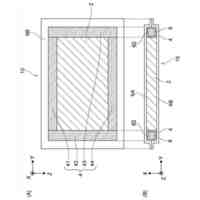
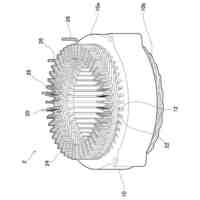
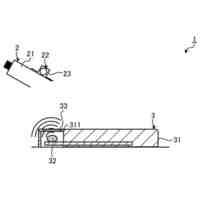
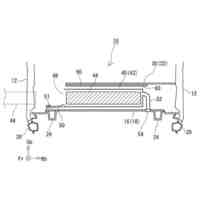
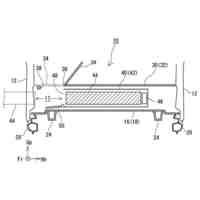
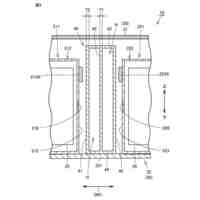
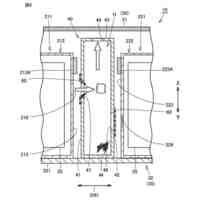
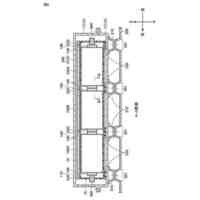
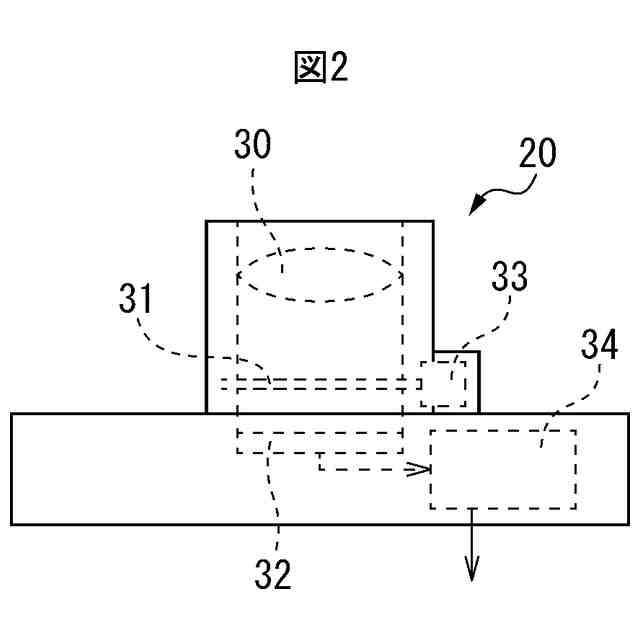
図2は、図解的に示したスタートラッカ―の側面図である。
図3は、ロール角速度、ピッチ角速度の変化等を示すタイムチャートである。
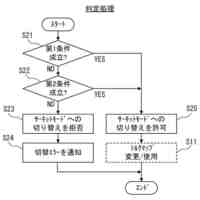
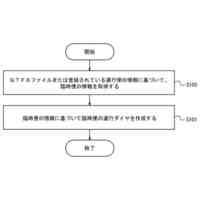
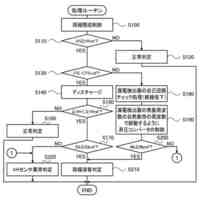
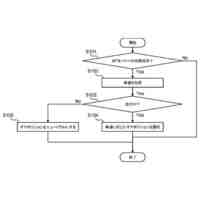
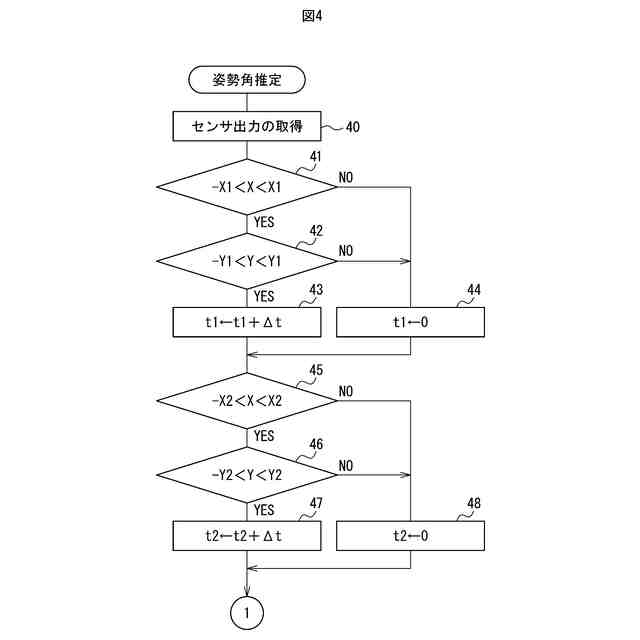
図4は、車両の姿勢角推定処理を実行するためのフローチャートである。
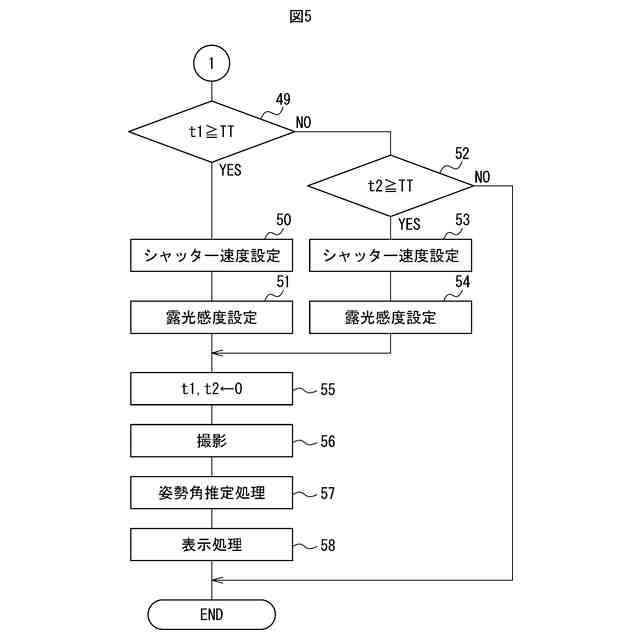
図5は、車両の姿勢角推定処理を実行するためのフローチャートである。
【発明を実施するための形態】
【0008】
図1は、車両1の機能構成を示している。なお、この車両1は、手動運転および自動運転のいずれの運転も可能である。図1を参照すると、10は車両1の駆動輪に駆動力を与えるための車両駆動部、11は車両1を制動するための制動装置、12は車両1を操舵するための操舵装置、13は車両1内に搭載された電子制御ユニットを夫々示す。図2に示されるように、電子制御ユニット13はデジタルコンピュータからなり、双方向性バス14によって互いに接続されたCPU(プロセッサ)15、ROMおよびRAMからなるメモリ16および入出力ポート17を具備する。また、電子制御ユニット13には通信装置18が接続されている。
【0009】
一方、図1に示されるように、車両1の屋根上には、星空を撮影可能なスタートラッカ―20が搭載されている。また、車両1には、前後方向の加速度、横方向の加速度、上下方向の加速度、ロール角速度、ピッチ角速度、ヨー角速度を検出可能な慣性センサ21が搭載されている。また、車両1には、その他の各種センサ22が搭載されている。この各種センサ22は、車両1の状態を検出するセンサおよび車両1の周辺を検出するセンサを含んでいる。この場合、車両1の状態を検出するセンサとしては、速度センサ、方位角センサ、地磁気センサ等が用いられており、車両1の周辺を検出するセンサとしては、車両1の前方、側方、後方を撮影するカメラ、および、車両1の前方、側方、後方を検知するライダー(LIDAR)、レーダー、クリアランスソナー等が用いられている。
【0010】
また、図1に示されるように、車両1には、GNSS(Global Navigation Satellite System:全球測位衛星システム)受信装置23、地図データ記憶装置24、ナビゲーション装置23、および、車両1の姿勢を表示する表示装置26が搭載されている。GNSS受信装置23は、複数の人工衛星から得られる情報に基づいて、車両1の現在位置(例えば車両1の緯度及び経度)を検出することができ、このGNSS受信装置23として、例えば、GPS受信装置が用いられる。また、地図データ記憶装置24には、車両1の走行に必要な地図データ等が記憶されている。スタートラッカ―20、慣性センサ21、各種センサ22、GNSS受信装置23、地図データ記憶装置24、ナビゲーション装置25および表示装置26は、電子制御ユニット13に接続されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
装置
2日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
装置
2日前
トヨタ自動車株式会社
通信装置
9日前
トヨタ自動車株式会社
溶接装置
6日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
蓄電装置
8日前
トヨタ自動車株式会社
電源装置
9日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
車両構造
10日前
トヨタ自動車株式会社
液系電池
10日前
トヨタ自動車株式会社
ステータ
10日前
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
送電装置
9日前
トヨタ自動車株式会社
電動車両
1日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
水系電池
今日
トヨタ自動車株式会社
更新装置
13日前
トヨタ自動車株式会社
電源装置
3日前
トヨタ自動車株式会社
電動車両
1日前
トヨタ自動車株式会社
電動車両
1日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
路側装置
13日前
トヨタ自動車株式会社
路側装置
13日前
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
電気自動車
9日前
トヨタ自動車株式会社
電気自動車
9日前
トヨタ自動車株式会社
電気自動車
1日前
トヨタ自動車株式会社
電気自動車
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ