TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025127633
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2024024428
出願日
2024-02-21
発明の名称
車両製造システム、車両製造方法及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B62D
65/18 20060101AFI20250826BHJP(鉄道以外の路面車両)
要約
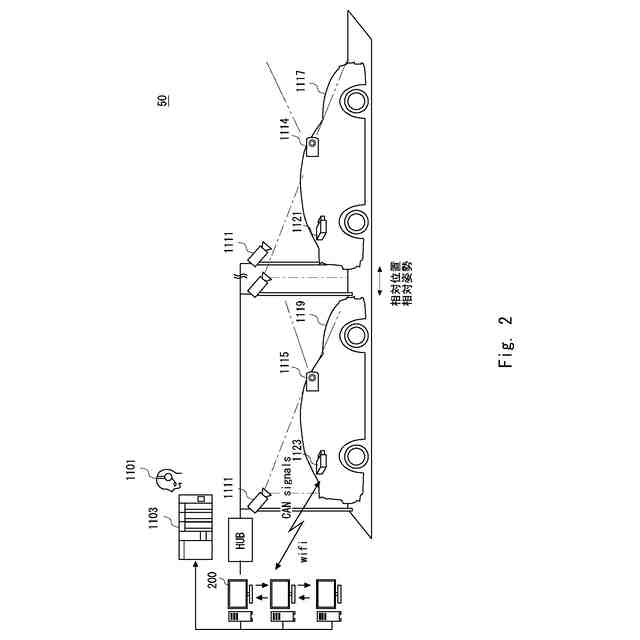
【課題】車両内部の情報取得部で後部の車両の位置姿勢の情報を取得できない場合、後続の車両に前部の車両の位置姿勢の情報を取得できる車両を選択して並べ替える、車両製造システムを提供する。
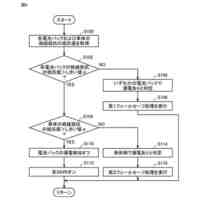
【解決手段】連続して移動しながら製造される複数の車両の中の第1の車両に後部の車両の位置姿勢を示す第1の情報を取得する第1の情報取得手段が搭載されているか否か判定する判定手段と、判定手段が第1の車両に第1の情報取得手段が搭載されていないと判定した場合、第1の車両の後ろに続く第2の車両に、前部の車両の位置姿勢を示す第2の情報を取得する第2の情報取得手段が搭載された車両を選択して並べ替える、車両並べ替え手段と、を備える、車両製造システムを提供する。
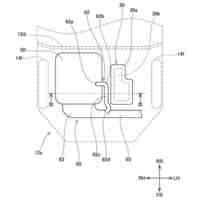
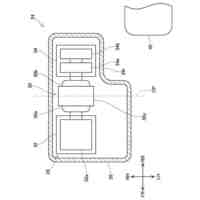
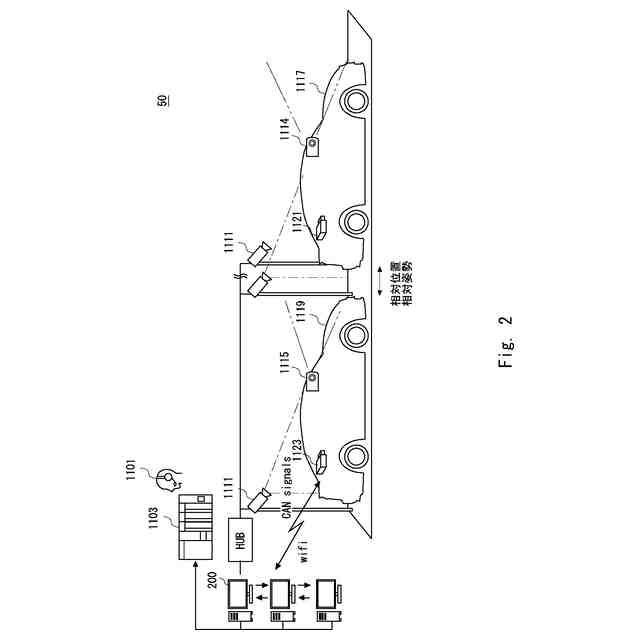
【選択図】図2
特許請求の範囲
【請求項1】
連続して移動しながら製造される複数の車両の中の第1の車両に後部の車両の位置姿勢を示す第1の情報を取得する第1の情報取得手段が搭載されているか否か判定する判定手段と、
前記判定手段が前記第1の車両に前記第1の情報取得手段が搭載されていないと判定した場合、前記第1の車両の後ろに続く第2の車両に、前部の車両の位置姿勢を示す第2の情報を取得する第2の情報取得手段が搭載された車両を選択して並べ替える、車両並べ替え手段と、を備える、車両製造システム。
続きを表示(約 960 文字)
【請求項2】
前記第1の情報取得手段は、撮像装置、Lidar、レーダ、GPSまたは超音波センサであり、
前記第2の情報取得手段は、撮像装置、Lidar、レーダ、GPSまたは超音波センサであり、
前記第1の情報は、画像または距離であり、
前記第2の情報は、画像または距離である、請求項1に記載の車両製造システム。
【請求項3】
前記判定手段は、生産情報または車両の内部情報を用いて第1の情報取得手段の搭載の有無を判定する、請求項1に記載の車両製造システム。
【請求項4】
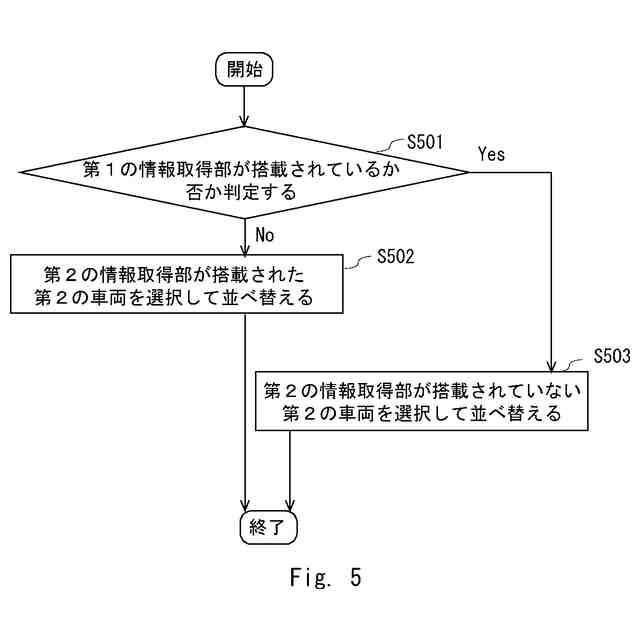
前記判定手段が前記第1の車両に前記第1の情報取得手段が搭載されていると判定した場合、前記車両並べ替え手段は、前記第1の車両の後ろに続く前記第2の車両に、前記第2の情報取得手段が搭載されていない車両を選択して並べ替える、請求項1に記載の車両製造システム。
【請求項5】
製造工程終了後、前記第1の車両と前記第2の車両の順番を生産順に戻す、請求項1に記載の車両製造システム。
【請求項6】
前記順番を生産順に戻すとき、前記第1の車両及び前記第2の車両の外部から取得された第3の情報を用いる、請求項5に記載の車両製造システム。
【請求項7】
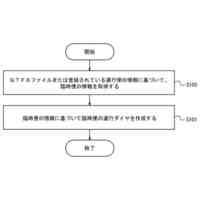
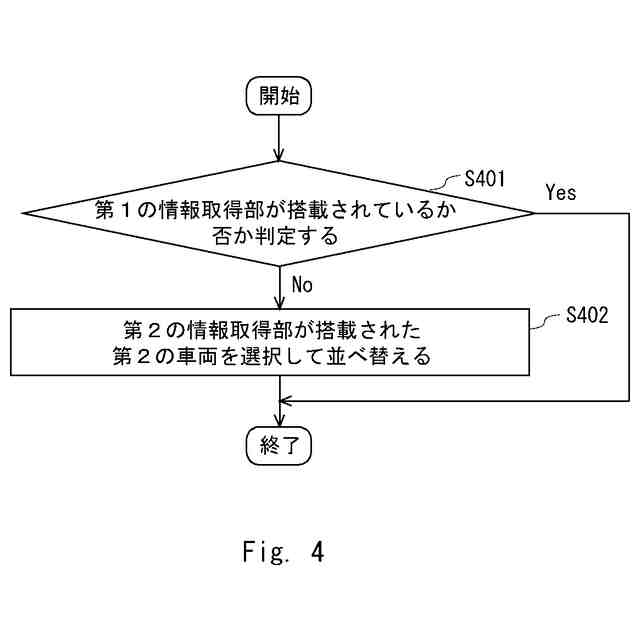
連続して移動しながら製造される複数の車両の中の第1の車両に後部の車両の位置姿勢を示す第1の情報を取得する第1の情報取得手段が搭載されているか否か判定し、
前記第1の情報取得手段が搭載されていないと判定した場合、前記第1の車両の後ろに続く第2の車両に、前部の車両の位置姿勢を示す第2の情報を取得する第2の情報取得手段が搭載された車両を選択して並べ替える、車両製造方法。
【請求項8】
連続して移動しながら製造される複数の車両の中の第1の車両に後部の車両の位置姿勢を示す第1の情報を取得する第1の情報取得手段が搭載されているか否か判定し、
前記第1の情報取得手段が搭載されていないと判定した場合、前記第1の車両の後ろに続く第2の車両に、前部の車両の位置姿勢を示す第2の情報を取得する第2の情報取得手段が搭載された車両を選択して並べ替える、ことを情報処理装置に実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は車両製造システム、車両製造方法及びプログラムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
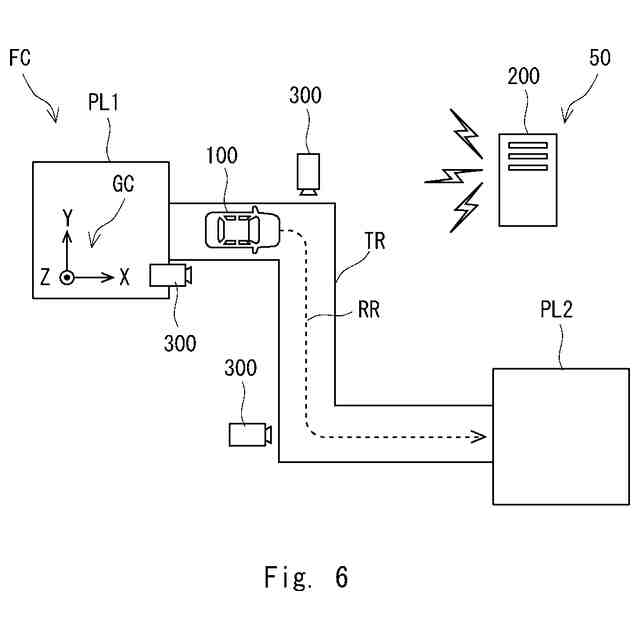
特許文献1には、車両が自律的にまたは遠隔制御により、車両を生産するための製造システム内を走行することが記載されている。
【先行技術文献】
【特許文献】
【0003】
特表2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1には、車両外部の情報を用いて遠隔制御することしか開示されていない。そこで、本開示の目的は、車両内部の情報取得部で後部の車両の位置姿勢の情報を取得できない場合、後続の車両に前部の車両の位置姿勢の情報を取得できる車両を選択して並べ替える、車両製造システムを提供することである。
【課題を解決するための手段】
【0005】
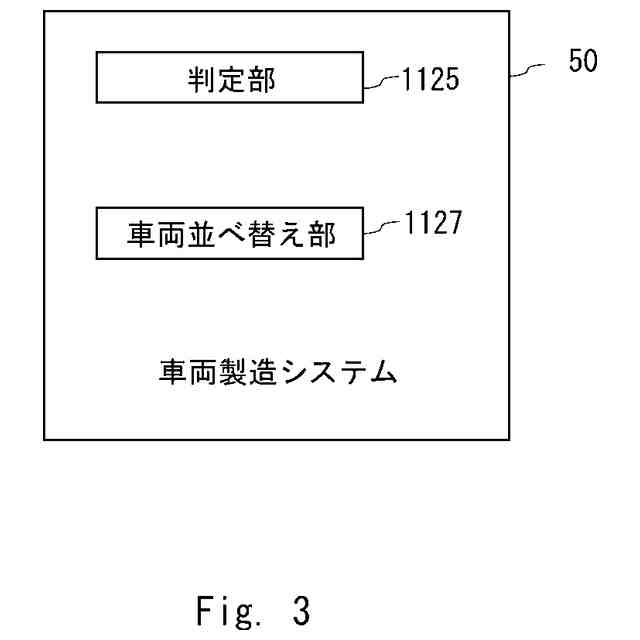
本開示の車両製造システムは、
連続して移動しながら製造される複数の車両の中の第1の車両に後部の車両の位置姿勢を示す第1の情報を取得する第1の情報取得手段が搭載されているか否か判定する判定手段と、
前記判定手段が前記第1の車両に前記第1の情報取得手段が搭載されていないと判定した場合、前記第1の車両の後ろに続く第2の車両に、前部の車両の位置姿勢を示す第2の情報を取得する第2の情報取得手段が搭載された車両を選択して並べ替える、車両並べ替え手段と、を備える、車両製造システムである。
【0006】
上記構成により、車両内部の情報取得部で後部の車両の位置姿勢の情報を取得できない場合、後続の車両に前部の車両の位置姿勢の情報を取得できる車両を選択して並べ替える、車両製造システムが提供される。
【0007】
本開示の車両製造システムは、
前記第1の情報取得手段は、撮像装置、Lidar、レーダ、GPSまたは超音波センサであり、
前記第2の情報取得手段は、撮像装置、Lidar、レーダ、GPSまたは超音波センサであり、
前記第1の情報は、画像または距離であり、
前記第2の情報は、画像または距離である、ことを特徴とする。
【0008】
上記構成は、第1の情報取得手段と、第2の情報取得手段と、第1の情報と、第2の情報の一例である。
【0009】
本開示の車両製造システムは、
前記判定手段は、生産情報または車両の内部情報を用いて第1の情報取得手段の搭載の有無を判定することを特徴とする。
【0010】
上記構成は、判定方法の一例である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
22日前
トヨタ自動車株式会社
電池
29日前
トヨタ自動車株式会社
電池
26日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
方法
5日前
トヨタ自動車株式会社
電池
15日前
トヨタ自動車株式会社
車両
27日前
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
車両
28日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
ロータ
1か月前
トヨタ自動車株式会社
モータ
12日前
トヨタ自動車株式会社
電動車
1か月前
トヨタ自動車株式会社
光電極
28日前
トヨタ自動車株式会社
モータ
16日前
トヨタ自動車株式会社
電動車
16日前
トヨタ自動車株式会社
ロータ
16日前
トヨタ自動車株式会社
電動車
12日前
トヨタ自動車株式会社
モータ
16日前
トヨタ自動車株式会社
減圧弁
1か月前
トヨタ自動車株式会社
負極層
12日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
電動車
1か月前
トヨタ自動車株式会社
モータ
22日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ