TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025127556
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2024024320
出願日
2024-02-21
発明の名称
プログラマブルロジックコントローラおよびそれを設定する設定支援装置
出願人
株式会社キーエンス
代理人
弁理士法人大塚国際特許事務所
主分類
G05B
19/18 20060101AFI20250826BHJP(制御;調整)
要約
【課題】カム曲線が所望の特性となるようにユーザがカム曲線を調整する際のユーザの負担を軽減する。
【解決手段】カム曲線決定部は第一点と第二点との間の一または複数の通過点の位置の指定を受け付けて、当該第一点と当該一または複数の通過点と当該第二点とを通る変位がなめらかな曲線からなるカム曲線であって、入力軸の変位に対する出力軸の変位を表すカム曲線を決定する。生成部は、決定されたカム曲線と、入力軸の変位を示す入力位相信号とに基づいて当該カム曲線に従う出力軸の変位を示す出力信号を生成する。カム曲線決定部は、一または複数の通過点のいずれかの通過点の指定と、指定された当該通過点における速度と加速度とのうちの少なくとも一方の指定と、を受け付けて、当該指定された通過点における速度または加速度が指定された速度または加速度を満たすように、なめらかな曲線からなるカム曲線を決定する。
【選択図】図7
特許請求の範囲
【請求項1】
第一点と第二点との間の一または複数の通過点の位置の指定を受け付けて、当該第一点と当該一または複数の通過点と当該第二点とを通る変位がなめらかな曲線からなるカム曲線であって、入力軸の変位に対する出力軸の変位を表すカム曲線を決定するカム曲線決定部と、
前記カム曲線決定部により決定されたカム曲線と、前記入力軸の変位を示す入力位相信号とに基づいて当該カム曲線に従う前記出力軸の変位を示す出力信号を生成する生成部と、を有し、
前記カム曲線決定部は、前記一または複数の通過点のいずれかの通過点の指定と、指定された当該通過点における速度と加速度とのうちの少なくとも一方の指定と、を受け付けて、当該指定された通過点における速度または加速度が指定された速度または加速度を満たすように、前記なめらかな曲線からなるカム曲線を決定する、ことを特徴とするプログラマブルロジックコントローラ。
続きを表示(約 1,500 文字)
【請求項2】
前記通過点は、入力軸の変位と、出力軸の変位とにより指定される、ことを特徴とする請求項1に記載のプログラマブルロジックコントローラ。
【請求項3】
前記カム曲線決定部は、前記カム曲線における前記第一点と前記第二点との間に複数の通過点が存在する場合、前記複数の通過点のそれぞれについて、速度または加速度の指定を行うか否かの指定を受け付ける、ことを特徴とする請求項1に記載のプログラマブルロジックコントローラ。
【請求項4】
前記カム曲線決定部は、前記カム曲線において隣接する二つの通過点からなる区間を5次関数で補間し、隣接する二つの区間のうち先行する区間における5次関数と後続の区間における5次関数とを、当該先行する区間と当該後続の区間との境界において1階微分から4階微分までが連続するという制約にしたがって、決定し、速度または加速度が指定された通過点においては前記指定された通過点における速度または加速度が前記指定された速度または加速度を満たすように前記カム曲線を決定する、ことを特徴とする請求項1に記載のプログラマブルロジックコントローラ。
【請求項5】
前記カム曲線決定部は、前記指定された通過点において速度が指定された場合、4階微分が連続するという制約を解除し、前記指定された通過点を終点とする先行区間と、前記指定された通過点を始点とする後続区間とが当該指定された通過点において1階微分から3階微分までが連続するという制約と、前記1階微分が前記指定された速度に一致するように、前記カム曲線を決定する、ことを特徴とする請求項4に記載のプログラマブルロジックコントローラ。
【請求項6】
前記カム曲線決定部は、前記指定された通過点において速度と加速度が指定された場合、3階微分と4階微分とが連続するという制約を解除し、前記指定された通過点を終点とする先行区間と、前記指定された通過点を始点とする後続区間とが当該指定された通過点において1階微分から2階微分までが連続するという制約と、前記1階微分が前記指定された速度に一致し、前記2階微分が前記指定された加速度に一致するように、前記カム曲線を決定する、ことを特徴とする請求項4に記載のプログラマブルロジックコントローラ。
【請求項7】
前記指定された通過点における速度または加速度は、数値により指定される、ことを特徴とする請求項1に記載のプログラマブルロジックコントローラ。
【請求項8】
前記指定された通過点における速度または加速度は、当該通過点における前記カム曲線の接線の傾きをポインティングデバイスを操作すること、により指定される、ことを特徴とする請求項1に記載のプログラマブルロジックコントローラ。
【請求項9】
前記生成部は、
前記カム曲線から電子カムの入力軸の変位と出力軸の変位とを示すカムテーブルを作成するテーブル作成部と、
前記カムテーブルを記憶するテーブル記憶部と、を有し、
前記カムテーブルを参照し、前記入力位相信号に対応する前記出力信号を生成するように構成されている、ことを特徴とする請求項1に記載のプログラマブルロジックコントローラ。
【請求項10】
制御プログラムを実行するプログラム実行部をさらに有し、
前記プログラム実行部は、前記制御プログラムから前記カムテーブルを参照し、前記電子カムを実現するモータ駆動装置に前記出力信号を出力する、ことを特徴とする請求項9に記載のプログラマブルロジックコントローラ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、プログラマブルロジックコントローラおよびそれを設定する設定支援装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
ファクトリーオートメーションにおいてプログラマブルロジックコントローラ(PLC)は、産業機械を制御する中核的なコントローラである。産業機械のほとんどはモータを駆動源として様々な負荷を駆動する。従来、モータにより機械的にカムを駆動することでカム機構を制御することが主流であったが、近年は、カムを電子的に実現する電子カムが提案されている(特許文献1)。特許文献1によれば、PLCにおける電子カムの位置制御に5次関数を使用し、電子カムの速度制御に4次関数を使用し、電子カムの加速度制御に3次関数を使用することで、変化点付近の電子カムの動作をなめらかにすることが提案されている。より具体的には、なめらかなスプライン曲線を使用することで、メカの振動や負荷が抑えられるという。
【先行技術文献】
【特許文献】
【0003】
特開2006-172438号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、スプライン曲線を使用したからといって、必ずしもユーザが所望する動作が実現されるとは限らない。特に、ユーザが複数の通過点を指定し、指定された複数の通過点を通過するようにスプライン曲線によるカム曲線が引かれた場合、各通過点での動作がユーザの所望する通りにならないことがある。たとえば、ある通過点から次の通過点までの区間において、電子カムの変位が電子カムの移動可能範囲を超えてしまうようなカム曲線が生成されてしまうことがある。
【0005】
そこで、本発明は、カム曲線が所望の特性となるようにユーザがカム曲線を調整する際のユーザの負担を軽減することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、たとえば、
第一点と第二点との間の一または複数の通過点の位置の指定を受け付けて、当該第一点と当該一または複数の通過点と当該第二点とを通る変位がなめらかな曲線からなるカム曲線であって、入力軸の変位に対する出力軸の変位を表すカム曲線を決定するカム曲線決定部と、
前記カム曲線決定部により決定されたカム曲線と、前記入力軸の変位を示す入力位相信号とに基づいて当該カム曲線に従う前記出力軸の変位を示す出力信号を生成する生成部と、を有し、
前記カム曲線決定部は、前記一または複数の通過点のいずれかの通過点の指定と、指定された当該通過点における速度と加速度とのうちの少なくとも一方の指定と、を受け付けて、当該指定された通過点における速度または加速度が指定された速度または加速度を満たすように、前記なめらかな曲線からなるカム曲線を決定する、ことを特徴とするプログラマブルロジックコントローラを提供する。
【発明の効果】
【0007】
本発明によれば、カム曲線が所望の特性となるようにユーザがカム曲線を調整する際のユーザの負担を軽減することが可能となる。
【図面の簡単な説明】
【0008】
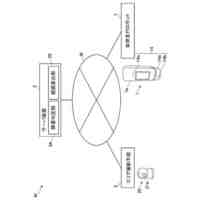
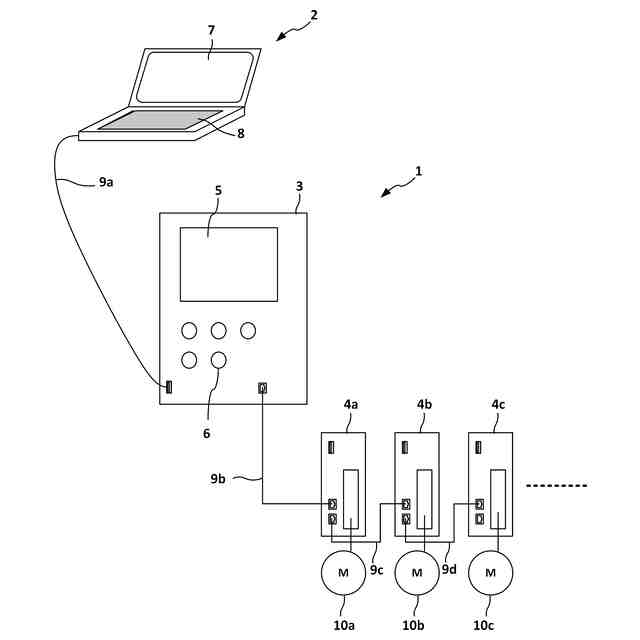
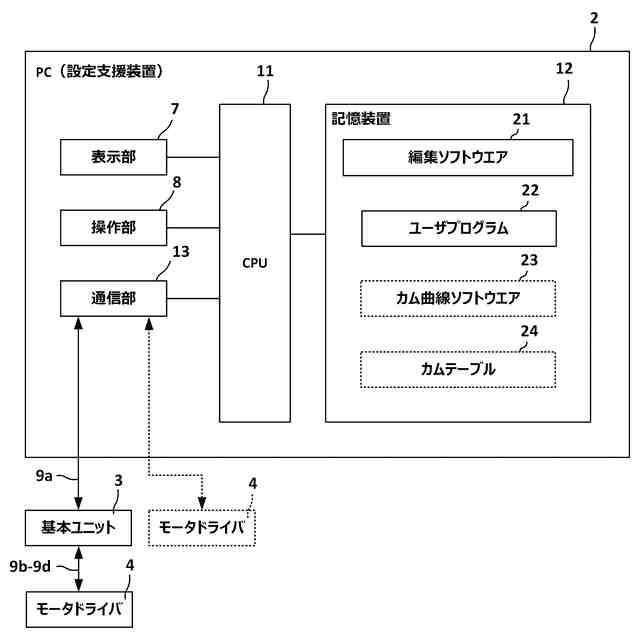
PLCシステムを説明する図
設定支援装置を説明する図
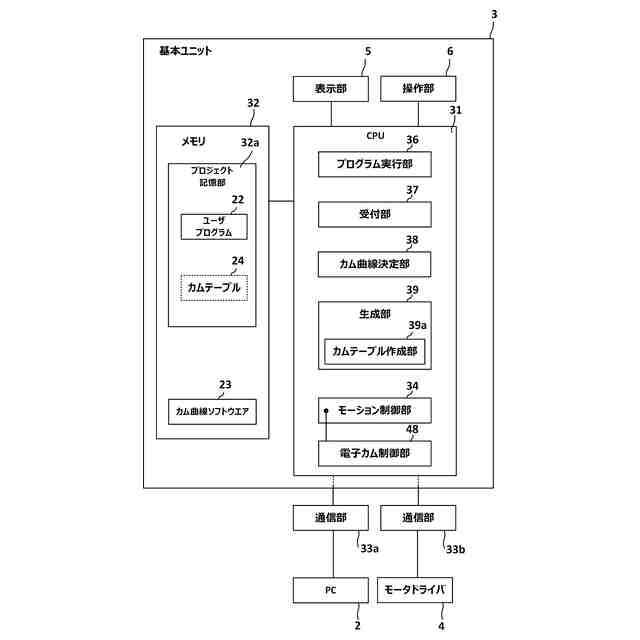
PLCの基本ユニット(CPUユニット)を説明する図
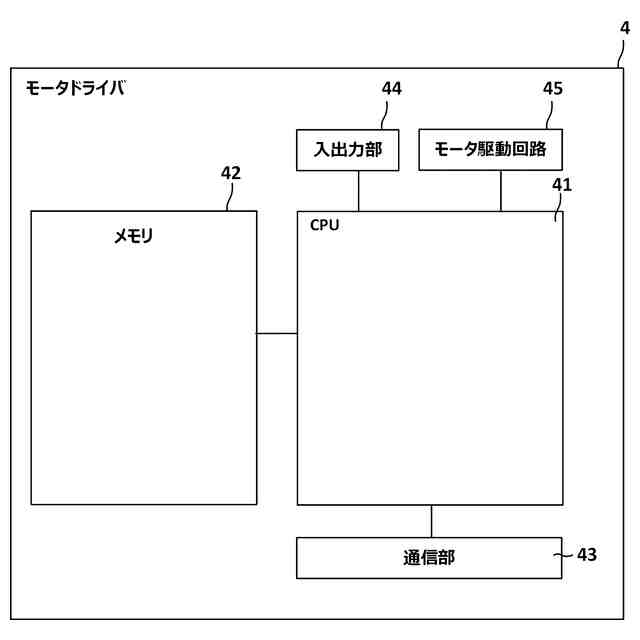
電子カムを実現するモータドライバ(モーションユニット)を説明する図
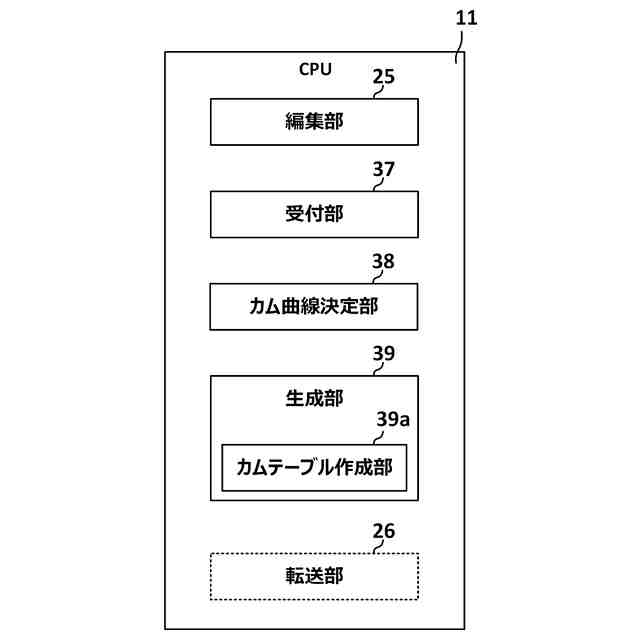
PCまたは基本ユニットのCPUにより実現される機能を説明する図
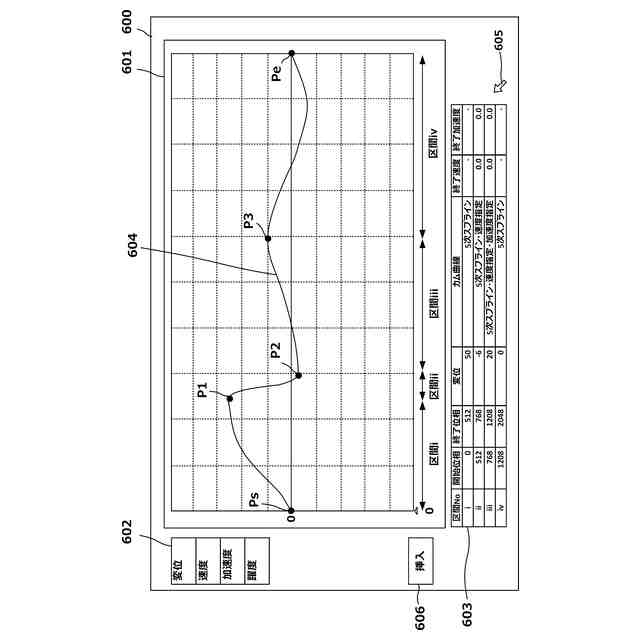
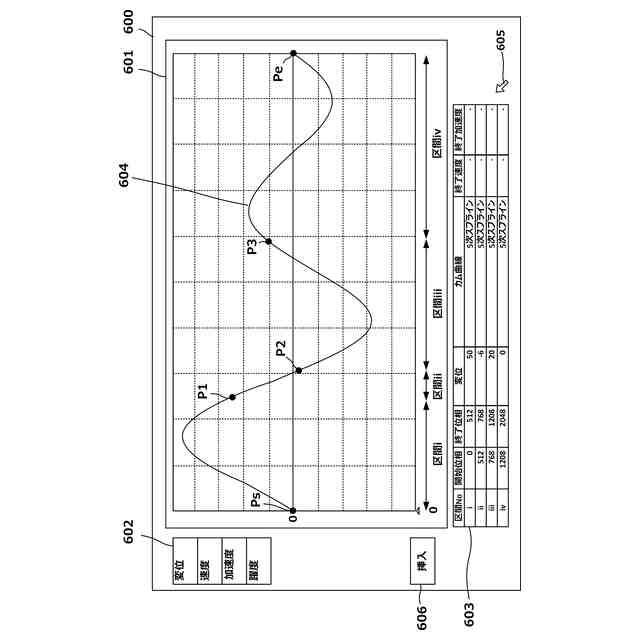
ユーザインタフェースを説明する図
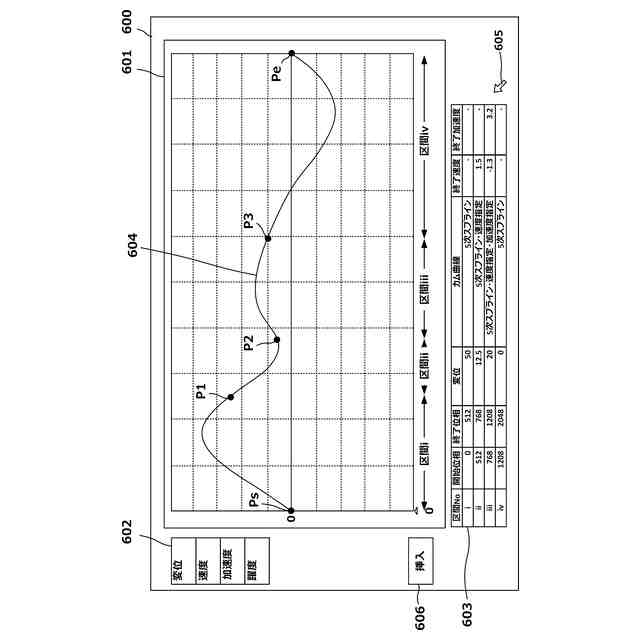
ユーザインタフェースを説明する図
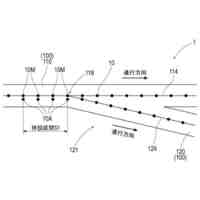
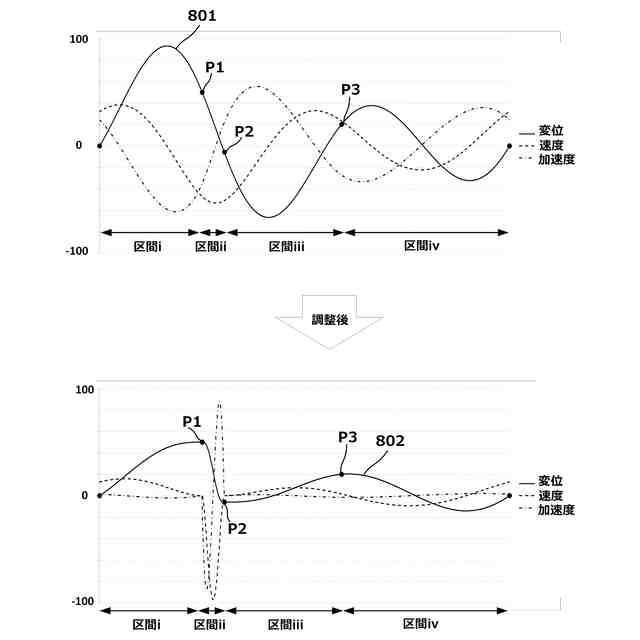
カム曲線とその微分曲線を説明する図
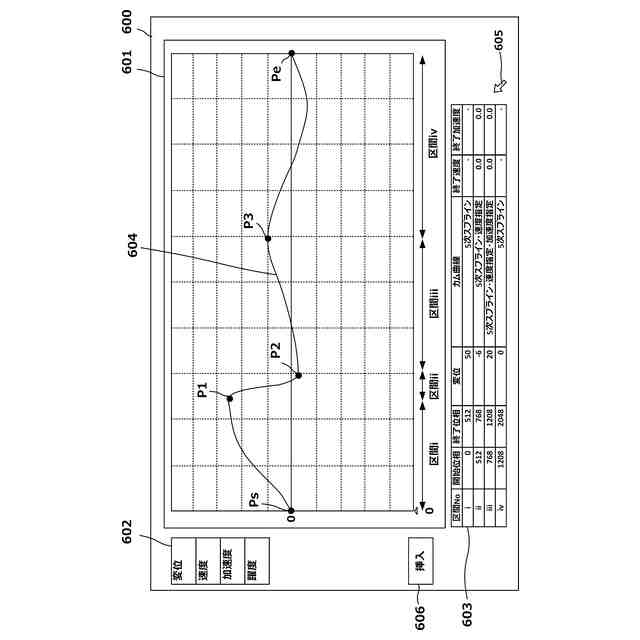
ユーザインタフェースを説明する図
微分値の指定による拘束条件の緩和を説明する図
カム曲線の決定方法を示すフローチャート
詳細なカム曲線の決定方法を示すフローチャート
ファンクションブロックを説明する図
【発明を実施するための形態】
【0009】
以下、添付図面を参照して実施形態を詳しく説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態で説明されている特徴の組み合わせの全てが発明に必須のものとは限らない。実施形態で説明されている複数の特徴のうち二つ以上の特徴が任意に組み合わされてもよい。また、同一若しくは同様の構成には同一の参照番号を付し、重複した説明は省略する。
【0010】
<PLCシステム>
図1は、本発明の実施の形態によるプログラマブル・ロジック・コントローラシステム(以下、PLCシステム1と称す。)の一構成例を示す。図1が示すように、このPLCシステム1は、ラダープログラムなどのユーザプログラムの編集を行うための設定支援装置であるPCと、工場等に設置される各種制御装置を統括的に制御するためのPLC(プログラマブルロジックコントローラ)である基本ユニット3と、複数のモータドライバ4a~4cと、を備えている。複数のモータドライバ4a~4cは、それぞれモータ10a、10b、10cを駆動する。モータ10a、10b、10cがサーボモータの場合、モータドライバ4a~4cはサーボアンプと呼ばれてもよい。モータ10a、10b、10cは、電子カムを実現する。基本ユニット3がカムテーブルに従って演算を実行して指令を発行し、モータドライバ4が指令通りにモータ10を駆動することで物理カムの動作が電子的に模倣される。これは「電子カム」と呼ばれる。なお、モーションユニットを制御するための制御機能は、基本ユニット3に内蔵されていてもよいし、基本ユニット3に電気的に接続された拡張ユニットに内蔵されていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
23日前
株式会社FUJI
工作機械
2か月前
株式会社カネカ
製造システム
9日前
株式会社ダイヘン
移動体
2か月前
株式会社FUJI
加工機械ライン
1か月前
ローム株式会社
基準電圧源
6日前
愛知製鋼株式会社
車両用システム
17日前
個人
作業車両自動化システム
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
ローム株式会社
半導体集積回路
3か月前
トヨタ自動車株式会社
生産管理システム
1か月前
株式会社ダイフク
搬送設備
2か月前
三栄ハイテックス株式会社
基準電圧回路
3か月前
トヨタ自動車株式会社
移動制御システム
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
13日前
トヨタ自動車株式会社
減圧弁
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
2か月前
株式会社鷺宮製作所
制御装置
2か月前
株式会社オプトン
制御プログラム生成装置
2か月前
株式会社ダイヘン
負荷時タップ切換器
2か月前
トヨタ自動車株式会社
クラッチペダル
20日前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
3か月前
キヤノン株式会社
配送システム
9日前
株式会社ダイフク
物品搬送設備
2か月前
マーク ヘイリー
消防ロボット
1か月前
株式会社ダイフク
物品搬送設備
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
23日前
愛知製鋼株式会社
マーカシステム及び制御方法
18日前
アズビル株式会社
制御システムおよび制御方法
1か月前
株式会社テイエルブイ
減圧弁の制御装置
1か月前
株式会社CAOS
移動体の制御システム
5日前
アズビル株式会社
制御システムおよび制御方法
1か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ