TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025126949
公報種別
公開特許公報(A)
公開日
2025-09-01
出願番号
2024023340
出願日
2024-02-20
発明の名称
車両制御装置、車両制御方法及びプログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20250825BHJP(信号)
要約
【課題】割込車両に関する警報及び/又は車両制御を適切な実行タイミングで実行できる可能性を高める車両制御装置を提供する。
【解決手段】車両制御装置は、自車両の前方に位置する物体が所定の認識条件を満たした場合に物体を認識し、自車両と認識された物体との関係が所定の衝突条件を満たした場合、認識された物体との衝突リスクを自車両の乗員に知らせる警報及び衝突リスクを軽減するために自車両の走行状態を制御する車両制御の少なくとも一方を行う。車両制御装置は、自車両が走行する自車線に隣接する隣接車線の自車両の前方に交通が規制された規制区間が存在するとの条件を少なくとも含む特定条件が成立した場合、特定条件が成立しない場合に比べて、認識条件を成立し易くする。
【選択図】 図3
特許請求の範囲
【請求項1】
自車両の前方に位置する物体が所定の認識条件を満たした場合に前記物体を認識し、前記自車両と前記認識された物体との関係が所定の衝突条件を満たした場合、前記認識された物体との衝突リスクを前記自車両の乗員に知らせる警報及び前記衝突リスクを軽減するために前記自車両の走行状態を制御する車両制御の少なくとも一方を行う車両制御装置において、
前記車両制御装置は、前記自車両が走行する自車線に隣接する隣接車線の前記自車両の前方に交通が規制された規制区間が存在するとの条件を少なくとも含む特定条件が成立した場合、前記特定条件が成立しない場合に比べて、前記認識条件を成立し易くするように構成された、
車両制御装置。
続きを表示(約 1,900 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記車両制御装置は、
前記自車両と前記規制区間の開始地点との間の距離が第1閾値距離以下であるとの条件、
前記規制区間が存在する前記隣接車線の前記自車両の後方に位置する隣接車両が前記自車両に接近するとの条件、及び、
前記自車線の前記自車両の前方に先行車が存在しないか、又は、前記先行車と前記自車両との間の距離が第2閾値距離以上であるとの条件、
の総てが成立した場合、前記特定条件が成立したと判定するように構成された、
車両制御装置。
【請求項3】
請求項2に記載の車両制御装置であって、
前記車両制御装置は、
前記自車両の前方の風景を撮影することにより取得した画像データに基いて前記物体を検出する第1検出部と、
前記自車両の前方に電磁波を送信し、前記送信された電磁波が前記物体によって反射された反射波を受信することにより前記物体を検出する第2検出部と、
前記自車両の周辺に音波を送信し、前記送信された音波が前記物体によって反射された反射波を受信することにより前記物体を検出する第3検出部と、を備え、
前記特定条件が成立しない場合には、
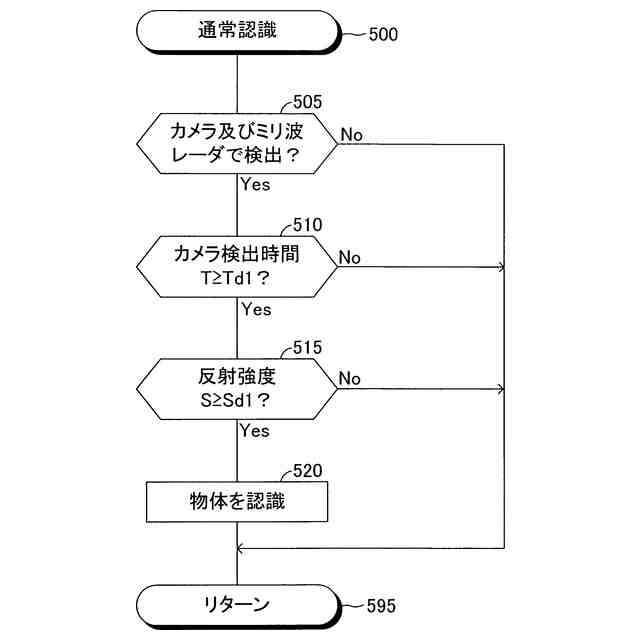
前記第1検出部が前記物体を検出し且つ前記1検出部が検出した物体と同じ物体を前記第2検出部が検出したとの条件、及び
前記第1検出部が前記物体を検出している検出時間が第1閾値時間以上であり、且つ、前記物体の前記電磁波の反射強度が第1閾値強度以上であるとの条件、
の両方が成立したとき、前記物体が前記認識条件を満たしたと判定し、
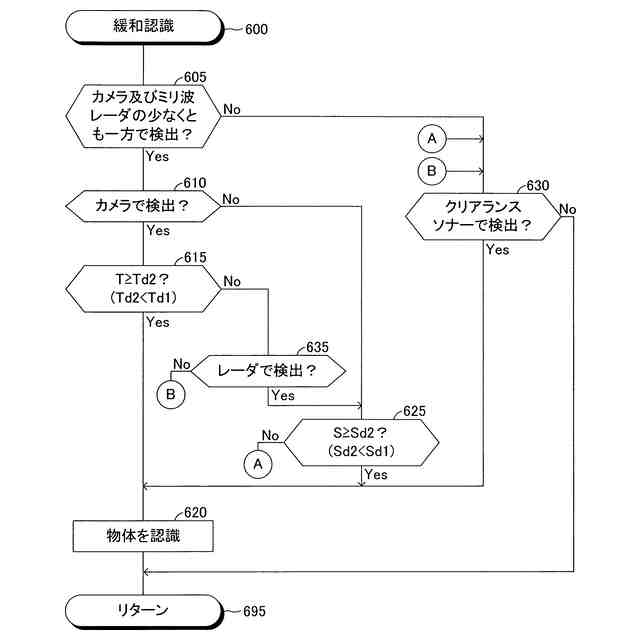
前記特定条件が成立した場合には、
前記第1検出部が前記物体を検出し且つ前記検出時間が前記第1閾値時間よりも短い第2閾値時間以上であるとの条件、
前記第2検出部が前記物体を検出し且つ前記反射強度が前記第1閾値強度よりも小さな第2閾値強度以上であるとの条件、及び
前記第3検出部が前記物体を検出したとの条件、
の何れか一つが成立したとき、前記物体が前記認識条件を満たしたと判定し、
更に、前記自車両の右側の右検出領域及び左側の左検出領域を含む検出領域に位置する物体について前記認識条件が成立するか否かを判定し、
前記特定条件が成立した場合には、前記右検出領域及び前記左検出領域のうち前記規制区間が存在する側の領域で前記特定条件が成立しない場合よりも前記認識条件を成立し易くする、
ように構成された、車両制御装置。
【請求項4】
自車両に搭載されたコンピュータが、前記自車両の前方に位置する物体が所定の認識条件を満たした場合に前記物体を認識し、前記自車両と前記認識された物体との関係が所定の衝突条件を満たした場合、前記認識された物体との衝突リスクを前記自車両の乗員に知らせる警報及び前記衝突リスクを軽減するために前記自車両の走行状態を制御する車両制御の少なくとも一方を行う車両制御方法において、
前記車両制御方法は、
前記コンピュータが、前記自車両が走行する自車線に隣接する隣接車線の前記自車両の前方に交通が規制された規制区間が存在するとの条件を少なくとも含む特定条件が成立するか否かを判定するステップと、
前記コンピュータが、前記特定条件が成立した場合、前記特定条件が成立しない場合に比べて、前記認識条件を成立し易くするステップと、
を含む、車両制御方法。
【請求項5】
自車両に搭載されたコンピュータに、前記自車両の前方に位置する物体が所定の認識条件を満たした場合に前記物体を認識させ、前記自車両と前記認識された物体との関係が所定の衝突条件を満たした場合、前記認識された物体との衝突リスクを前記自車両の乗員に知らせる警報及び前記衝突リスクを軽減するために前記自車両の走行状態を制御する車両制御の少なくとも一方を行うプログラムにおいて、
前記プログラムは、前記コンピュータに、
前記自車両が走行する自車線に隣接する隣接車線の前記自車両の前方に交通が規制された規制区間が存在するとの条件を少なくとも含む特定条件が成立するか否かを判定させるステップと、
前記特定条件が成立した場合、前記特定条件が成立しない場合に比べて、前記認識条件を成立し易くさせるステップと、
を実行させる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、所定の認識条件を満たした物体を認識し、自車両と認識された物体との関係が衝突条件を満たした場合、警報及び衝突リスクを軽減するための車両制御の少なくとも一方を行う車両制御装置、自車両に搭載されたコンピュータが、上記認識条件を満たした物体を認識し、衝突条件が成立した場合に警報及び車両制御の少なくとも一方を実行する車両制御方法、及び、自車両に搭載されたコンピュータに、上記認識条件を満たした物体を認識させ、衝突条件が成立した場合に警報及び車両制御の少なくとも一方を実行させるプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来から、衝突条件が成立した場合に警報及び車両制御の少なくとも一方を行う車両制御装置が知られている。例えば、特許文献1に記載の車両制御装置(以下、「従来装置」と称呼する。)は、隣接車線から自車線に割込みを行う割込車両に対して車両制御を通常よりも早いタイミングで実行する。
【先行技術文献】
【特許文献】
【0003】
特開2020-170278号公報
【発明の概要】
【0004】
割込車両は自車両の後側方から自車両の前方へ割り込む。このため、割込車両は、先行車及び対向車に比べて、自車両に接近した段階で認識される可能性が高い。従って、従来装置が割込車両を認識した場合、車両制御を実行すべき実行タイミングを既に超えてしまっている可能性がある。この場合、従来装置は、割込車両に関する警報及び/又は車両制御を上記実行タイミングで実行することができない。
【0005】
本発明は前述した課題に対処するためになされたものである。即ち、本発明の目的の一つは、割込車両に関する警報及び/又は車両制御を適切な実行タイミングで実行できる可能性を高める車両制御装置を提供することにある。
【0006】
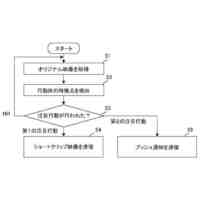
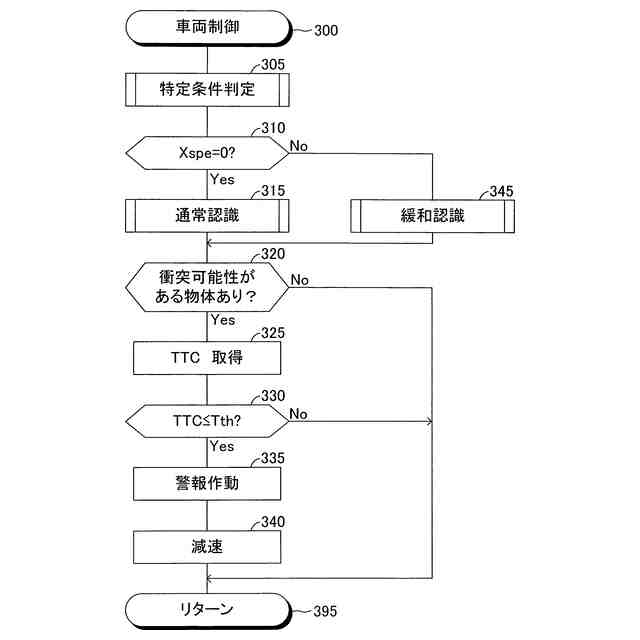
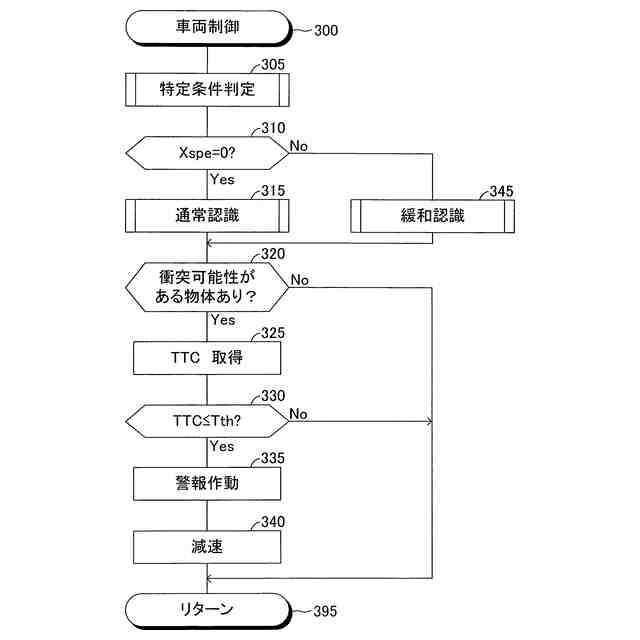
本発明の車両制御装置(以下、「本発明装置」と称呼する。)は、自車両の前方に位置する物体が所定の認識条件を満たした場合に前記物体を認識し(ステップ500乃至ステップ595、ステップ600乃至ステップ695)、前記自車両と前記認識された物体との関係が所定の衝突条件を満たした場合(ステップ330「Yes」)、前記認識された物体との衝突リスクを前記自車両の乗員に知らせる警報(ステップ335)及び前記衝突リスクを軽減するために前記自車両の走行状態を制御する車両制御(ステップ340)を実行する。
【0007】
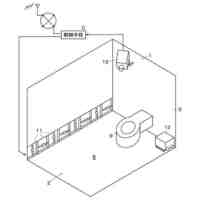
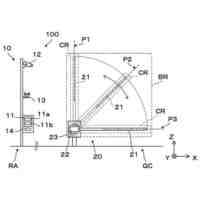
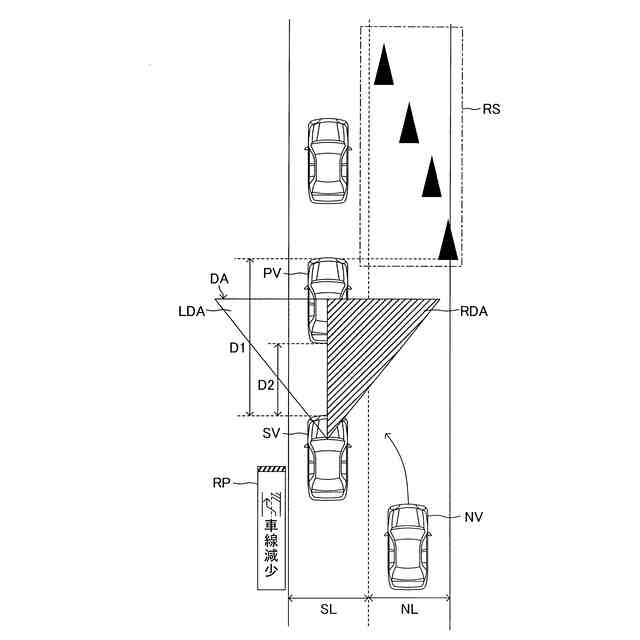
前記車両制御装置は、前記自車両が走行する自車線に隣接する隣接車線(NL)の前記自車両の前方に交通が規制された規制区間(RS)が存在するとの条件を少なくとも含む特定条件が成立した場合(ステップ310「No」)、前記特定条件が成立しない場合に比べて(ステップ310「Yes」)、前記認識条件を成立し易くするように構成されている(ステップ345)。
【0008】
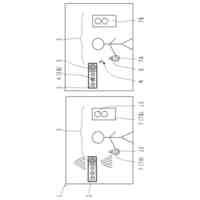
特定条件が成立した場合、隣接車線に存在する規制区間に起因して当該隣接車線を走行する隣接車両が自車両の後側方から自車両の前方へと割り込んでくる可能性が高まる。このような割込車両は自車両の後方から自車両の前方へと割り込んでくるために、割込車両の認識条件が成立したときには、割込車両に関する警報及び/又は車両制御を実行するタイミングを超えてしまっている可能性がある。本発明装置によれば、特定条件が成立した場合、特定条件が成立しない場合に比べて認識条件を成立し易くするので、割込車両を早めに認識することができる。この結果、割込車両に関する警報及び/又は車両制御を実行タイミングで実行できる可能性を高めることができる。
【図面の簡単な説明】
【0009】
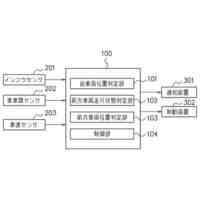
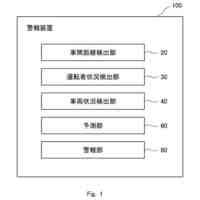
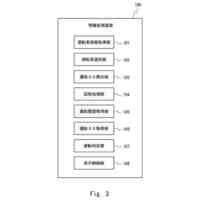
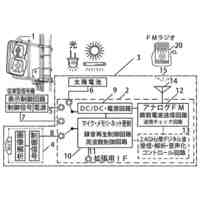
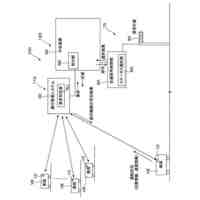
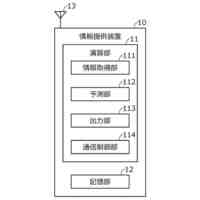
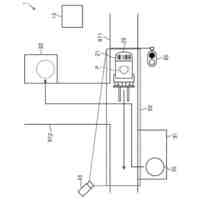
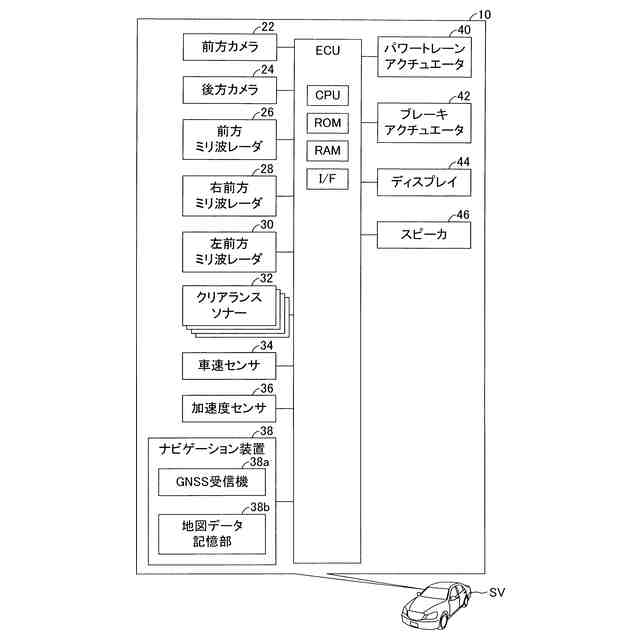
本発明の実施形態に係る車両制御装置の概略システム構成図である。
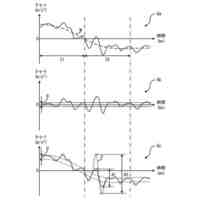
本発明の実施形態に係る車両制御装置の作動の概要の説明図である。
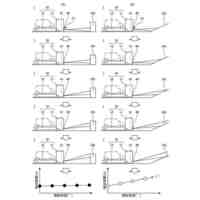
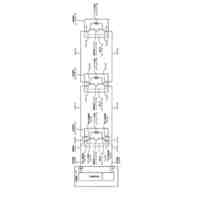
図1に示したECUのCPUが実行する車両制御ルーチンのフローチャートである。
図1に示したECUのCPUが実行する特定条件判定サブルーチンのフローチャートである。
図1に示したECUのCPUが実行する通常認識サブルーチンのフローチャートである。
図1に示したECUのCPUが実行する緩和認識サブルーチンのフローチャートである。
【発明を実施するための形態】
【0010】
図1に示したように、本実施形態に係る車両制御装置10(以下、「本装置10」と称呼する。)は、自車両SVに適用され、図1に示した構成要素を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本精機株式会社
路面投影装置
2か月前
日本精機株式会社
警報システム
4日前
エムケー精工株式会社
車両誘導装置
10日前
スズキ株式会社
運転支援装置
3日前
個人
防犯に特化したアプリケーション
2か月前
ニッタン株式会社
発信機
2か月前
株式会社国際電気
防災システム
7日前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
発信機
29日前
ニッタン株式会社
発信機
1か月前
TOA株式会社
拡声放送システム
2か月前
東京都公立大学法人
液滴検出装置
2か月前
トヨタ自動車株式会社
車両
1か月前
個人
乗り物の移動を支援する方法及び装置
1か月前
株式会社JVCケンウッド
警報装置
1か月前
日本信号株式会社
信号情報システム
1か月前
日本信号株式会社
情報提供システム
1か月前
アズビル株式会社
建物管理システム
3か月前
株式会社アジラ
データ転送システム
2か月前
ホーチキ株式会社
異常報知設備
3か月前
株式会社JVCケンウッド
情報処理装置
2か月前
個人
現示内容に関する情報放送機能付き信号機
1か月前
日本信号株式会社
交通信号制御システム
1か月前
トヨタ自動車株式会社
回避動作判別装置
1か月前
ホーチキ株式会社
非常通報システム
3か月前
本田技研工業株式会社
情報提供装置
1か月前
株式会社豊田自動織機
制御システム
2か月前
本田技研工業株式会社
運転評価装置
1か月前
本田技研工業株式会社
物体検出装置
16日前
ホーチキ株式会社
火災検出システム
1か月前
本田技研工業株式会社
情報提供装置
1か月前
能美防災株式会社
非常伝達装置
3日前
ユニティガードシステム株式会社
警備監視システム
3か月前
Adora株式会社
アプリ使用制御システム
3か月前
トヨタ自動車株式会社
障害物検知装置
2か月前
本田技研工業株式会社
保険料算出装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ