TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025125857
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024022083
出願日
2024-02-16
発明の名称
自律走行車
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
G01C
21/28 20060101AFI20250821BHJP(測定;試験)
要約
【課題】自己位置推定精度の低下を抑制すること。
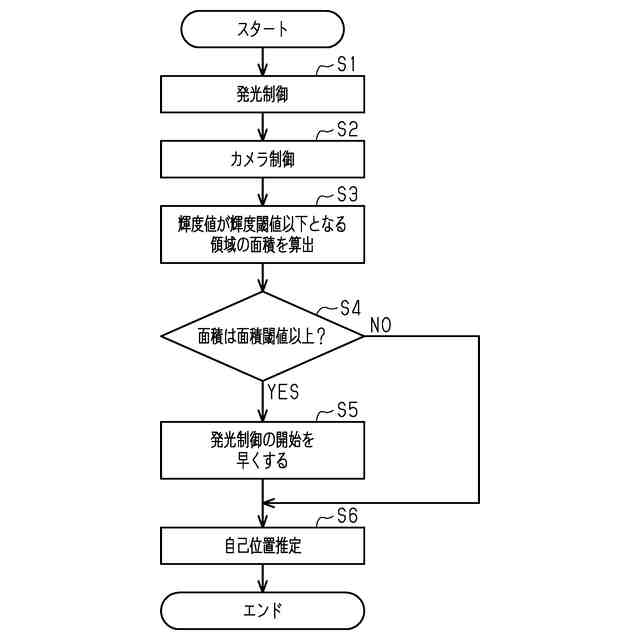
【解決手段】自律走行車は、制御部を備える。制御部は、発光ダイオードに発光を行わせる発光制御と、発光制御により発光ダイオードが発光している間にカメラに撮像を行わせるカメラ制御と、カメラ制御により取得した画像データと地図画像データとを照合することで自己位置を推定する自己位置推定と、発光制御の開始からの時間経過に対する光量の増加量を変化させる要因に基づき、発光制御の開始からカメラ制御の開始までの時間を調整する調整制御と、を行う。
【選択図】図3
特許請求の範囲
【請求項1】
路面を撮像するように配置されたカメラと、
前記路面のうち前記カメラの撮像範囲に光を照射する発光ダイオードと、
前記路面を予め撮像した地図画像データと位置情報とを紐付けた地図データを記憶する記憶装置と、
制御部と、を備え、
前記制御部は、
前記発光ダイオードに発光を行わせる発光制御と、
前記発光制御により前記発光ダイオードが発光している間に前記カメラに撮像を行わせるカメラ制御と、
前記カメラ制御により取得した画像データと前記地図画像データとを照合することで自己位置を推定する自己位置推定と、
前記発光制御の開始からの時間経過に対する光量の増加量を変化させる要因に基づき、前記発光制御の開始から前記カメラ制御の開始までの時間を調整する調整制御と、を行うように構成される、自律走行車。
続きを表示(約 300 文字)
【請求項2】
前記調整制御は、
前記画像データから輝度値が輝度閾値以下となる領域の面積を算出し、
前記面積が面積閾値以上の場合、前記発光制御の開始から前記カメラ制御の開始までの時間を長くする制御である、請求項1に記載の自律走行車。
【請求項3】
前記発光ダイオードの温度を検出する温度センサを備え、
前記調整制御は、前記温度センサによって検出される温度が温度閾値より低い場合、前記温度センサによって検出される温度が前記温度閾値以上の場合と比べて、前記発光制御の開始から前記カメラ制御の開始までの時間を長くする制御である、請求項1に記載の自律走行車。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自律走行車に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に開示の自律走行車は、カメラと、発光ダイオードと、記憶装置と、制御部と、を備える。カメラは、路面を撮像するように配置されている。発光ダイオードは、路面のうちカメラの撮像範囲に光を照射する。記憶装置は、地図データを記憶している。地図データは、予め路面を撮像した地図画像データと位置情報とが紐付けされたデータである。制御部は、カメラから画像データを取得する。制御部は、画像データと地図画像データとのマッチングにより自己位置を推定する。
【先行技術文献】
【特許文献】
【0003】
特開2022-39689号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
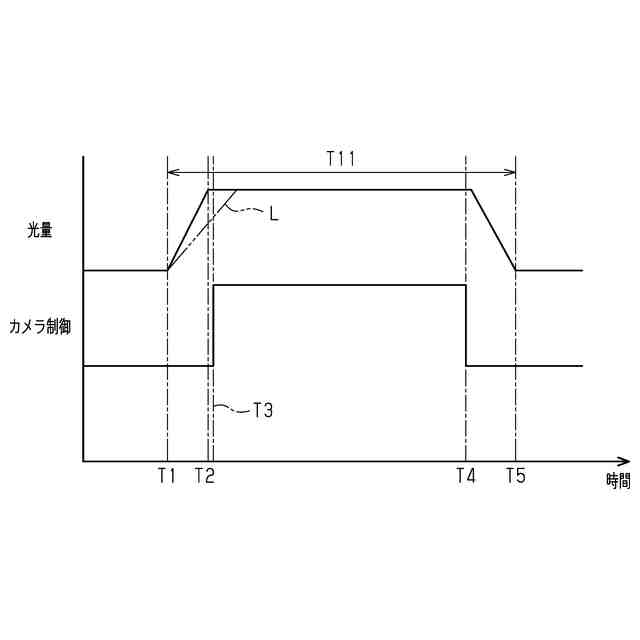
発光ダイオードの発光時間が長いほど消費電力が大きくなる。このため、発光ダイオードは、間欠的に発光するように制御される。発光ダイオードに発光を行わせる発光制御の開始からの時間経過につれて発光ダイオードの光量は増加していく。カメラに撮像を行わせるカメラ制御は、発光ダイオードの光量が最大となった状態で開始されるように設定されている。しかしながら、発光制御の開始からの時間経過に対する光量の増加量は変化する場合がある。この場合、光量が不足した状態でカメラ制御が開始されることを原因として、自己位置推定精度が低下する場合がある。
【課題を解決するための手段】
【0005】
上記課題を解決する自律走行車は、路面を撮像するように配置されたカメラと、前記路面のうち前記カメラの撮像範囲に光を照射する発光ダイオードと、前記路面を予め撮像した地図画像データと位置情報とを紐付けた地図データを記憶する記憶装置と、制御部と、を備え、前記制御部は、前記発光ダイオードに発光を行わせる発光制御と、前記発光制御により前記発光ダイオードが発光している間に前記カメラに撮像を行わせるカメラ制御と、前記カメラ制御により取得した画像データと前記地図画像データとを照合することで自己位置を推定する自己位置推定と、前記発光制御の開始からの時間経過に対する光量の増加量を変化させる要因に基づき、前記発光制御の開始から前記カメラ制御の開始までの時間を調整する調整制御と、を行うように構成される。
【0006】
これによれば、発光制御の開始からの時間経過に対する光量の増加量を変化させる要因に基づき、発光制御の開始からカメラ制御の開始までの時間が調整される。発光ダイオードの光量が十分に増加したタイミングでカメラ制御が開始されるように発光制御の開始からカメラ制御の開始までの時間を調整することができる。光量が不足した状態でカメラ制御が開始されることが抑制されるため、自己位置推定精度の低下を抑制することができる。
【0007】
上記自律走行車について、前記調整制御は、前記画像データから輝度値が輝度閾値以下となる領域の面積を算出し、前記面積が面積閾値以上の場合、前記発光制御の開始から前記カメラ制御の開始までの時間を長くする制御であってもよい。
【0008】
上記自律走行車について、前記発光ダイオードの温度を検出する温度センサを備え、前記調整制御は、前記温度センサによって検出される温度が温度閾値より低い場合、前記温度センサによって検出される温度が前記温度閾値以上の場合と比べて、前記発光制御の開始から前記カメラ制御の開始までの時間を長くする制御であってもよい。
【発明の効果】
【0009】
本発明によれば、自己位置推定精度の低下を抑制できる。
【図面の簡単な説明】
【0010】
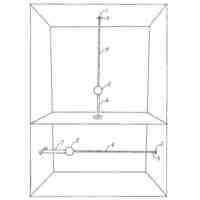
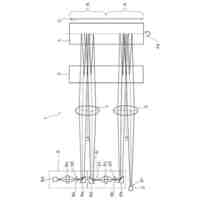
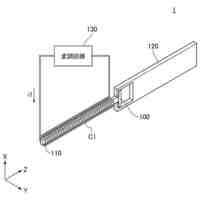
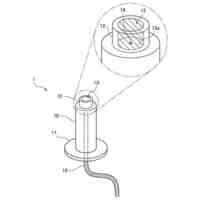
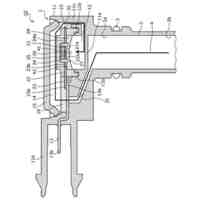
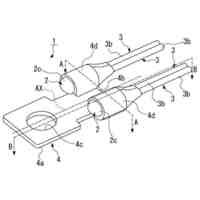
図1は自律走行車の側面図である。
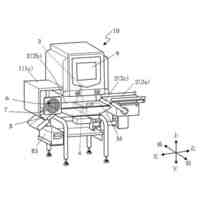
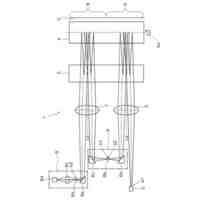
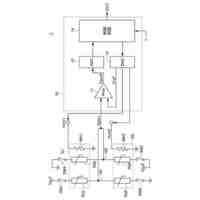
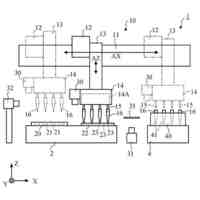
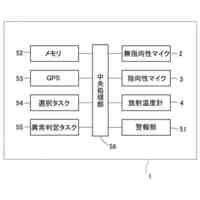
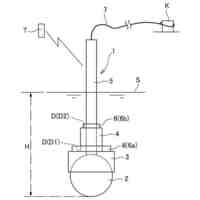
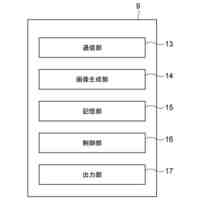
図2は自律走行車の概略構成図である。
図3は制御部が行う制御を示すフローチャートである。
図4は発光制御とカメラ制御との関係を示すタイムチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
計量スプーン
13日前
個人
微小振動検出装置
24日前
株式会社イシダ
X線検査装置
24日前
株式会社辰巳菱機
システム
1か月前
株式会社東芝
センサ
24日前
アンリツ株式会社
分光器
19日前
トヨタ自動車株式会社
表示装置
5日前
アンリツ株式会社
分光器
19日前
ダイハツ工業株式会社
測定用具
17日前
TDK株式会社
磁気センサ
13日前
学校法人立命館
液面レベルセンサ
1か月前
株式会社精工技研
光電圧プローブ
25日前
TDK株式会社
磁気センサ
20日前
TDK株式会社
ガスセンサ
27日前
株式会社ヨコオ
コンタクタ
17日前
株式会社カワタ
サンプリング装置
28日前
日本精工株式会社
分注装置
1か月前
個人
粘塑性を用いた有限要素法の定式化
5日前
株式会社ナリス化粧品
角層細胞採取用具
3日前
国立大学法人京都大学
バイオセンサ
20日前
三菱マテリアル株式会社
温度センサ
3日前
大陽日酸株式会社
液面センサ
20日前
富士電機株式会社
半導体パッケージ
13日前
日本碍子株式会社
ガスセンサ
14日前
TDK株式会社
磁気計測装置
4日前
中国電力株式会社
異常箇所検出装置
4日前
大同特殊鋼株式会社
超音波探傷方法
13日前
株式会社関電工
検相器用治具
11日前
三菱マテリアル株式会社
温度センサ
1か月前
成田空港給油施設株式会社
保持治具
4日前
個人
材料特性パラメータの算定方法
13日前
三菱マテリアル株式会社
温度センサ
3日前
新潟精機株式会社
溶接用ゲージ
13日前
大新土木株式会社
水深測量装置
19日前
株式会社イシダ
検査装置
19日前
戸田建設株式会社
測量機
4日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ