TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025119175
公報種別
公開特許公報(A)
公開日
2025-08-14
出願番号
2024013894
出願日
2024-02-01
発明の名称
制御計画装置、制御計画方法及びプログラム
出願人
日本電気株式会社
代理人
個人
主分類
G05D
1/646 20240101AFI20250806BHJP(制御;調整)
要約
【課題】移動体の動作を制御するための計算の負荷を低減することが可能な制御計画装置を提供する。
【解決手段】走行状態取得手段は、移動体の方向を変更可能な単一の駆動輪を有する移動体の走行している状態である走行状態を取得する。差分算出手段は、移動体が走行すべき経路である目標経路と走行状態との差分を算出する。制御計画生成手段は、差分に基づいて、駆動輪の走行速度を予め定められた値とし、駆動輪の移動体に対する角度である操舵角の角速度を予め定められた第1の値又は第1の値とは操舵角の変化の方向が異なる第2の値のいずれかとして、予め定められた条件を満たすように駆動輪を制御するための制御計画を生成する。
【選択図】図1
特許請求の範囲
【請求項1】
移動体の方向を変更可能な単一の駆動輪を有する移動体の走行している状態である走行状態を取得する走行状態取得手段と、
前記移動体が走行すべき経路である目標経路と前記走行状態との差分を算出する差分算出手段と、
前記差分に基づいて、前記駆動輪の走行速度を予め定められた値とし、前記駆動輪の前記移動体に対する角度である操舵角の角速度を予め定められた第1の値又は前記第1の値とは前記操舵角の変化の方向が異なる第2の値のいずれかとして、予め定められた条件を満たすように前記駆動輪を制御するための制御計画を生成する制御計画生成手段と、
を有する、制御計画装置。
続きを表示(約 2,000 文字)
【請求項2】
前記差分は、前記走行状態における前記移動体の進行方向と前記目標経路における軌道が延びる方向との差分である方向差分を少なくとも含み、
前記制御計画生成手段は、前記方向差分に基づいて、前記第1の値と前記第2の値とをそれぞれ用いて前記角速度を制御する少なくとも1つの期間を特定することによって、前記条件を満たすような制御計画を生成する、
請求項1に記載の制御計画装置。
【請求項3】
前記差分は、前記方向差分と、前記目標経路と前記走行状態における前記移動体の位置との距離に対応する位置差分とを含み、
前記制御計画生成手段は、前記方向差分と前記位置差分とに基づいて、前記角速度を前記第1の値とした後で前記第2の値とする第1の期間と、前記角速度を前記第2の値とした後で前記第1の値とする第2の期間とを特定することによって、前記条件を満たすような制御計画を生成する、
請求項2に記載の制御計画装置。
【請求項4】
前記制御計画生成手段は、少なくとも前記走行速度及び前記角速度を含む前記移動体の走行に関する走行パラメータに応じて特定された走行特性を用いて、前記条件を満たすような前記第1の期間と前記第2の期間とを特定する、
請求項3に記載の制御計画装置。
【請求項5】
前記第1の値と前記第2の値とをそれぞれ用いて前記角速度を制御する期間と当該期間で変化する走行状態との関係を示す関係情報を予め格納する関係情報格納手段、
をさらに有し、
前記制御計画生成手段は、
前記走行特性を用いて、前記方向差分に基づいて、前記第1の期間と前記第2の期間との関係を特定し、
前記関係情報を用いて、前記条件を満たすような前記第1の期間と前記第2の期間とを特定する、
請求項4に記載の制御計画装置。
【請求項6】
前記第1の値と前記第2の値とをそれぞれ用いて前記角速度を制御する期間と当該期間で変化する走行状態との関係を示す関係情報を予め格納する関係情報格納手段、
をさらに有し、
前記制御計画生成手段は、
前記関係情報を用いて、前記方向差分に基づいて、前記第1の期間と前記第2の期間との関係を特定し、
前記関係情報を用いて、前記条件を満たすような前記第1の期間と前記第2の期間とを特定する、
請求項3に記載の制御計画装置。
【請求項7】
前記制御計画生成手段は、複数の異なる前記第1の期間及び複数の異なる前記第2の期間のそれぞれについて、当該第1の期間及び当該第2の期間で前記角速度を制御すると仮定した場合に、前記走行状態における前記移動体の進行方向が前記目標経路における軌道が延びる方向に沿った方向となるときの、前記目標経路と前記走行状態における前記移動体の位置との距離である第1の距離を算出し、前記第1の距離を用いて、複数の前記第1の期間及び複数の前記第2の期間のうち、前記条件を満たすような第1の期間及び第2の期間を特定する、
請求項3に記載の制御計画装置。
【請求項8】
前記制御計画生成手段は、複数の前記第1の期間及び複数の前記第2の期間のうち、前記第1の距離が最小となるような第1の期間及び第2の期間を特定する、
請求項7に記載の制御計画装置。
【請求項9】
移動体の方向を変更可能な単一の駆動輪を有する移動体の走行している状態である走行状態を取得し、
前記移動体が走行すべき経路である目標経路と前記走行状態との差分を算出し、
前記差分に基づいて、前記駆動輪の走行速度を予め定められた値とし、前記駆動輪の前記移動体に対する角度である操舵角の角速度を予め定められた第1の値又は前記第1の値とは前記操舵角の変化の方向が異なる第2の値のいずれかとして、予め定められた条件を満たすように前記駆動輪を制御するための制御計画を生成する、
制御計画方法。
【請求項10】
移動体の方向を変更可能な単一の駆動輪を有する移動体の走行している状態である走行状態を取得するステップと、
前記移動体が走行すべき経路である目標経路と前記走行状態との差分を算出するステップと、
前記差分に基づいて、前記駆動輪の走行速度を予め定められた値とし、前記駆動輪の前記移動体に対する角度である操舵角の角速度を予め定められた第1の値又は前記第1の値とは前記操舵角の変化の方向が異なる第2の値のいずれかとして、予め定められた条件を満たすように前記駆動輪を制御するための制御計画を生成するステップと、
をコンピュータに実行させる、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御計画装置、制御計画方法及びプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
例えばフォークリフト等の移動体を制御する技術がある。これに関連して、例えば、特許文献1は、自律走行車を開示している。特許文献1にかかる自律走行車は、単一の操舵輪の操舵角を制御する制御装置を有する。制御装置は、入力が操舵角のみの1次元となる無次元化運動モデルを用いて、非線形モデル予測制御を行い最適な入力を決定し、最適な入力に応じて操舵角を制御する。
【先行技術文献】
【特許文献】
【0003】
特許第7115816号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1にかかる技術では、操舵輪の操舵角を決定するために、1次元非線形最適化問題を解く必要がある。したがって、特許文献1にかかる技術では、自律走行車を制御するための計算の負荷が高くなるおそれがある。
【0005】
本開示の目的は、このような課題を解決するためになされたものであり、移動体の動作を制御するための計算の負荷を低減することが可能な制御計画装置、制御計画方法及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
本開示にかかる制御計画装置は、移動体の方向を変更可能な単一の駆動輪を有する移動体の走行している状態である走行状態を取得する走行状態取得手段と、前記移動体が走行すべき経路である目標経路と前記走行状態との差分を算出する差分算出手段と、前記差分に基づいて、前記駆動輪の走行速度を予め定められた値とし、前記駆動輪の前記移動体に対する角度である操舵角の角速度を予め定められた第1の値又は前記第1の値とは前記操舵角の変化の方向が異なる第2の値のいずれかとして、予め定められた条件を満たすように前記駆動輪を制御するための制御計画を生成する制御計画生成手段と、を有する。
【0007】
また、本開示にかかる制御計画方法は、移動体の方向を変更可能な単一の駆動輪を有する移動体の走行している状態である走行状態を取得し、前記移動体が走行すべき経路である目標経路と前記走行状態との差分を算出し、前記差分に基づいて、前記駆動輪の走行速度を予め定められた値とし、前記駆動輪の前記移動体に対する角度である操舵角の角速度を予め定められた第1の値又は前記第1の値とは前記操舵角の変化の方向が異なる第2の値のいずれかとして、予め定められた条件を満たすように前記駆動輪を制御するための制御計画を生成する。
【0008】
また、本開示にかかるプログラムは、移動体の方向を変更可能な単一の駆動輪を有する移動体の走行している状態である走行状態を取得するステップと、前記移動体が走行すべき経路である目標経路と前記走行状態との差分を算出するステップと、前記差分に基づいて、前記駆動輪の走行速度を予め定められた値とし、前記駆動輪の前記移動体に対する角度である操舵角の角速度を予め定められた第1の値又は前記第1の値とは前記操舵角の変化の方向が異なる第2の値のいずれかとして、予め定められた条件を満たすように前記駆動輪を制御するための制御計画を生成するステップと、をコンピュータに実行させる。
【発明の効果】
【0009】
本開示によれば、移動体の動作を制御するための計算の負荷を低減することが可能な制御計画装置、制御計画方法及びプログラムを提供できる。
【図面の簡単な説明】
【0010】
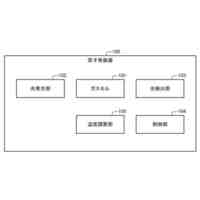
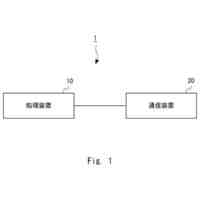
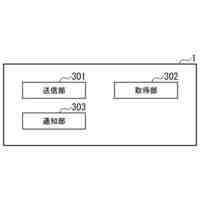
本開示にかかる制御計画装置の構成を示す図である。
本開示にかかる制御計画装置によって実行される制御計画方法を示すフローチャートである。
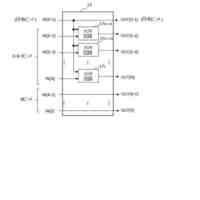
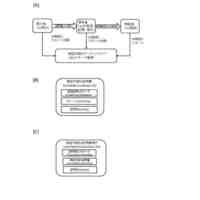
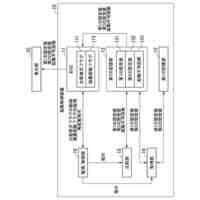
本開示にかかる制御計画システムの構成を示す図である。
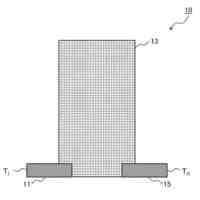
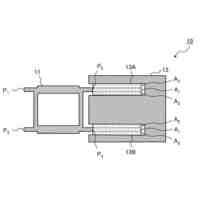
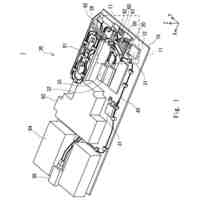
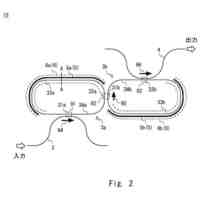
本開示にかかる移動体の構成を例示する図である。
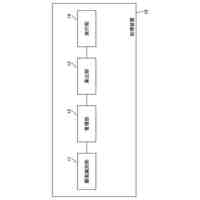
本開示にかかる制御計画装置の構成を示す図である。
本開示にかかる、目標経路と走行状態との差分について説明するための図である。
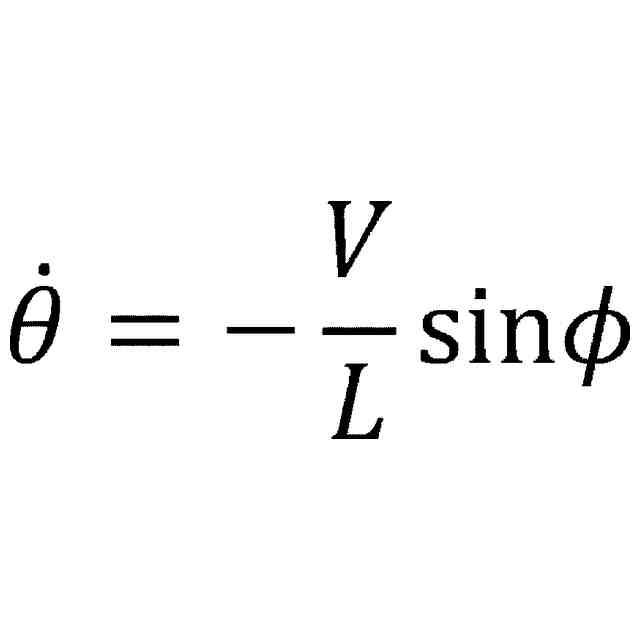
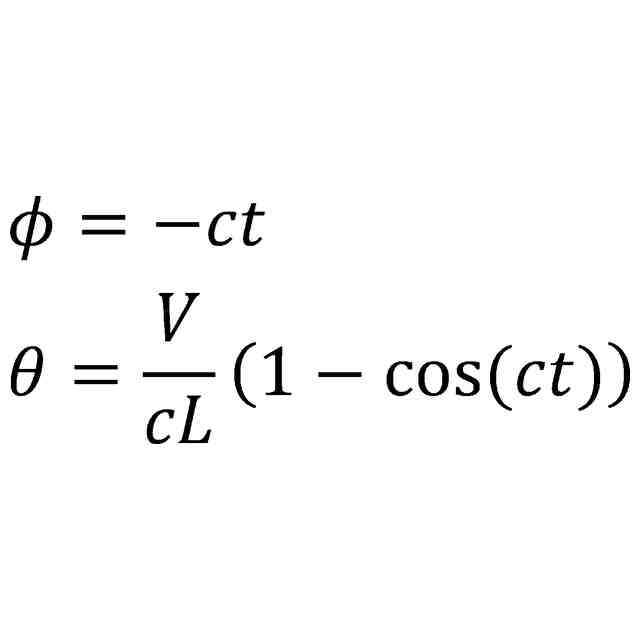
本開示にかかる移動体の駆動輪の操舵角を制御した場合の車体角の変化について説明するための図である。
本開示にかかる移動体の駆動輪の操舵角を制御した場合の車体角の変化について説明するための図である。
本開示にかかる関係情報格納部によって格納される関係情報を例示する図である。
本開示にかかる制御計画生成部によって生成される制御計画の例を示す図である。
本開示にかかる制御計画生成部によって生成される制御計画の例を示す図である。
本開示にかかる制御計画装置によって実行される処理の例を示すフローチャートである。
本開示にかかる制御計画装置によって実行される処理の例を示すフローチャートである。
本開示にかかる制御計画装置の構成を示す図である。
本開示にかかる制御計画装置によって実行される処理の例を示すフローチャートである。
本開示にかかる制御計画装置によって実行される処理の例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本電気株式会社
学習装置
3日前
日本電気株式会社
学習装置
10日前
日本電気株式会社
原子発振器
5日前
日本電気株式会社
信号処理装置及び方法
1か月前
日本電気株式会社
移相器およびアンテナ装置
17日前
日本電気株式会社
移相器およびアンテナ装置
17日前
日本電気株式会社
移相器およびアンテナ装置
17日前
日本電気株式会社
光モジュール及び通信装置
1か月前
日本電気株式会社
情報処理システム及びその方法
1か月前
日本電気株式会社
ケージ、光伝送装置及び挿抜方法
14日前
日本電気株式会社
光ファイバ伝送路及び光伝送方法
25日前
日本電気株式会社
TS合成装置および放送システム
6日前
日本電気株式会社
処理装置、方法、及びプログラム
3日前
日本電気株式会社
リング共振器、およびその製造方法
4日前
日本電気株式会社
測定装置、測定方法及びプログラム
1か月前
日本電気株式会社
測定装置、測定方法及びプログラム
1か月前
日本電気株式会社
レドーム、及びレドームの製造方法
20日前
日本電気株式会社
リング共振器、およびその製造方法
5日前
日本電気株式会社
処理装置、処理方法、及びプログラム
17日前
日本電気株式会社
処理装置、処理方法、及びプログラム
13日前
日本電気株式会社
分析装置、分析方法、およびプログラム
20日前
日本電気株式会社
情報処理装置、情報処理方法、プログラム
6日前
日本電気株式会社
情報処理装置、情報処理方法、プログラム
3日前
日本電気株式会社
検証可能証明書システム、方法、記録媒体
1か月前
日本電気株式会社
情報処理装置、及び処理方法、プログラム
24日前
日本電気株式会社
情報処理装置、情報処理方法、プログラム
3日前
日本電気株式会社
画像検索装置、画像検索方法及び記憶媒体
今日
日本電気株式会社
制御計画装置、制御計画方法及びプログラム
25日前
日本電気株式会社
教育支援装置、教育支援方法及びプログラム
24日前
日本電気株式会社
受講管理装置、受講管理方法及びプログラム
24日前
日本電気株式会社
光増幅装置、光伝送システム及び光増幅方法
17日前
日本電気株式会社
ゲート装置、認証制御方法、及びプログラム
1か月前
日本電気株式会社
支援システム、処理方法、およびプログラム
19日前
日本電気株式会社
処理システム、処理方法、およびプログラム
7日前
日本電気株式会社
起動制御装置、起動制御方法、及びプログラム
25日前
日本電気株式会社
在庫調整装置、在庫調整方法、及びプログラム
25日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ