TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025112862
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024007376
出願日
2024-01-22
発明の名称
注目対象決定システム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G06T
7/70 20170101AFI20250725BHJP(計算;計数)
要約
【課題】ロボットの適切な注目対象を決定できる注目対象決定システムを提供する。
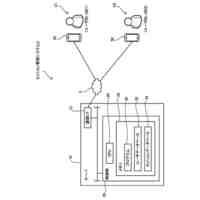
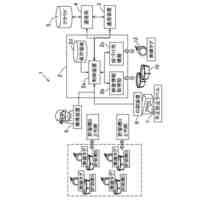
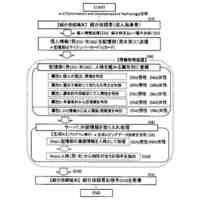
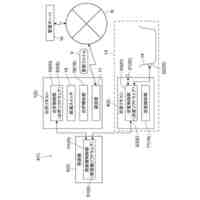
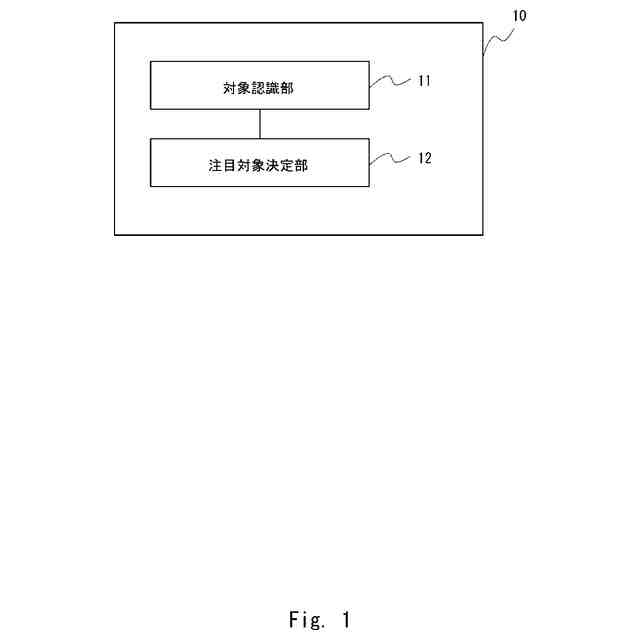
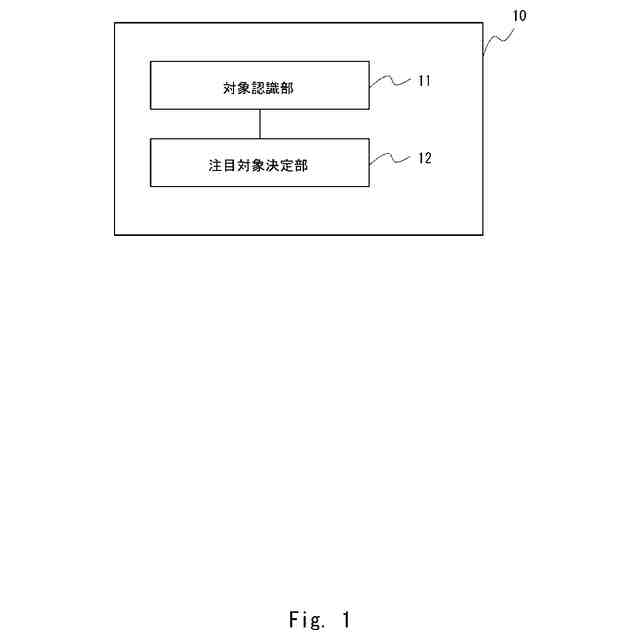
【解決手段】本開示に係る注目対象決定システムは、前後の画像から後画像におけるロボットの注目対象を決定する注目対象決定システムである。注目対象決定システムは、対象認識部11と、注目対象決定部12と、を備える。対象認識部11は、前後の画像からそれぞれの画像に含まれる複数の対象を認識する。注目対象決定部12は、後画像に含まれるそれぞれの対象の位置を示す情報と、前後の画像に基づいて算出される時間であって、後画像に含まれるそれぞれの対象に対するロボットの注目に関する時間を示す情報と、に基づいて、後画像におけるロボットの注目対象を決定する。
【選択図】図1
特許請求の範囲
【請求項1】
前後の画像から後画像におけるロボットの注目対象を決定する注目対象決定システムであって、
前後の画像からそれぞれの画像に含まれる複数の対象を認識する対象認識部と、
前記後画像に含まれるそれぞれの前記対象の位置を示す情報と、前記前後の画像に基づいて算出される時間であって、前記後画像に含まれるそれぞれの前記対象に対する前記ロボットの注目に関する時間を示す情報と、に基づいて、後画像における前記ロボットの注目対象を決定する注目対象決定部と、
を備えた、
注目対象決定システム。
続きを表示(約 1,000 文字)
【請求項2】
前記注目対象決定部は、
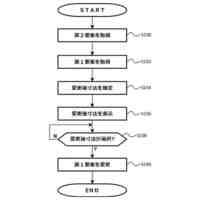
前記後画像に含まれる前記対象の位置を示す情報に基づいて、それぞれの前記対象に対する位置スコアを算出し、
少なくとも前記前後の画像から算出される時間を示す情報に基づいて、前記後画像に含まれるそれぞれの前記対象に対して、前記ロボットの注目に関する時間スコアを算出し、
前記位置スコア及び前記時間スコアに基づいた優先度に応じて、前記対象の中から前記注目対象を決定する、
請求項1に記載の注目対象決定システム。
【請求項3】
前記注目対象決定部は、
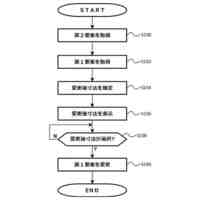
後画像における対象が前画像において注目対象である場合に、前記対象の累計注目時間を示す情報に基づいて、前記対象の時間スコアを算出し、
後画像における対象が前画像において注目対象でない場合に、予め定められた時間スコアに基づいて、前記対象の時間スコアを算出する、
請求項2に記載の注目対象決定システム。
【請求項4】
前記注目対象決定部は、
前記後画像に含まれる前記対象の種別情報に基づいて、それぞれの前記対象に対する種別スコアを決定する種別スコア算出部をさらに備え、
さらに前記種別スコアに基づいた優先度に応じて、前記対象の中から前記注目対象を決定する、
請求項2又は3に記載の注目対象決定システム。
【請求項5】
前後の画像から後画像におけるロボットの注目人物を決定する注目対象決定システムであって、
前後の画像からそれぞれの画像に含まれる人物及び非人物を認識し、前記人物と前記非人物とを対応付けて認識する対象認識部と、
後画像における前記人物の中から、前記ロボットの注目人物を決定する注目対象決定部と、
を備え、
前記注目対象決定部は、
前記後画像に含まれるそれぞれの前記人物の位置を示す情報と、
前記前後の画像に基づいて算出される時間であって、前記後画像に含まれるそれぞれの前記人物に対する前記ロボットの注目に関する時間を示す情報と、
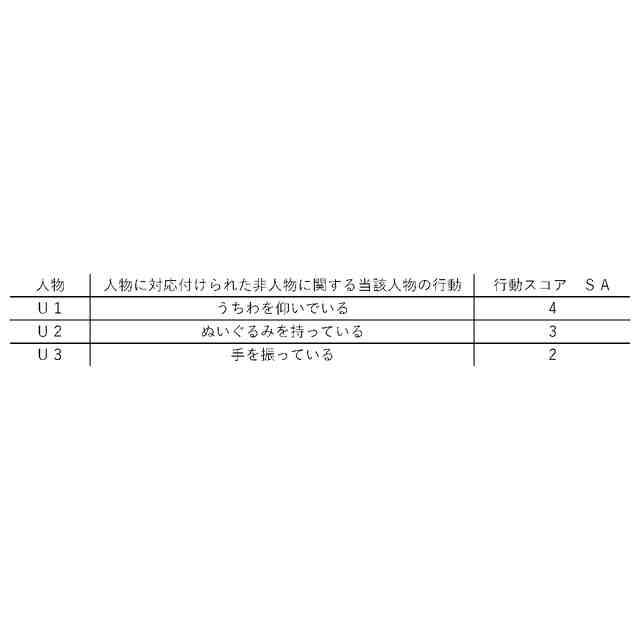
前記後画像に含まれるそれぞれの前記人物に対応付けられた前記非人物に関する当該人物の行動を示す情報と、
に基づいて、後画像における前記ロボットの注目人物を決定する、
注目対象決定システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、注目対象決定システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、自然なコミュニケーションやインタラクションを可能にする自律ロボットが開示されている。特許文献1に開示された自律ロボットは、カメラ画像から注目度マップを作成して、注目度最大の位置を向く。
【先行技術文献】
【特許文献】
【0003】
特開2020-017206号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した特許文献1に開示された自律ロボットでは、ロボットの周囲の対象のうち、特定の対象が注目対象となり、他の対象を注目する機会が少ないといった問題があった。
【0005】
本開示は、このような事情に鑑みなされたものであって、ロボットの適切な注目対象を決定できる注目対象決定システムを提供する。
【課題を解決するための手段】
【0006】
本開示に係る注目対象決定システムは、
前後の画像から後画像におけるロボットの注目対象を決定する注目対象決定システムであって、
前後の画像からそれぞれの画像に含まれる複数の対象を認識する対象認識部と、
前記後画像に含まれるそれぞれの前記対象の位置を示す情報と、前記前後の画像に基づいて算出される時間であって、前記後画像に含まれるそれぞれの前記対象に対する前記ロボットの注目に関する時間を示す情報と、に基づいて、後画像における前記ロボットの注目対象を決定する注目対象決定部と、
を備える。
【0007】
本開示に係る注目対象決定システムは、後画像に含まれるそれぞれの対象の位置を示す情報と、前後の画像に基づいて算出される時間であって、後画像に含まれるそれぞれの対象に対するロボットの注目に関する時間を示す情報と、に基づいて、後画像におけるロボットの注目対象を決定する。このような構成にすることによって、対象の注目に関する時間及び対象の位置を考慮して、ロボットの適切な注目対象を決定できる。
【0008】
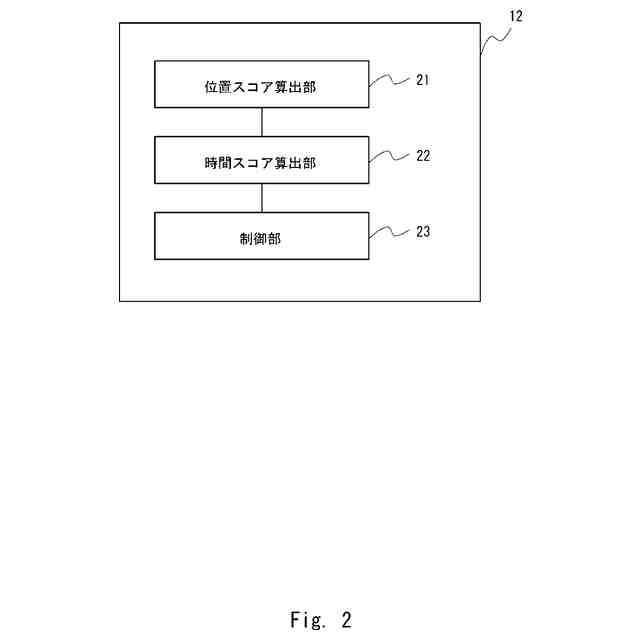
注目対象決定部は、後画像に含まれる対象の位置を示す情報に基づいて、それぞれの対象に対する位置スコアを算出し、少なくとも前後の画像から算出される時間を示す情報に基づいて、後画像に含まれるそれぞれの対象に対して、ロボットの注目に関する時間スコアを算出し、位置スコア及び時間スコアに基づいた優先度に応じて、対象の中から注目対象を決定してもよい。このような構成によって、時間及び位置を考慮したスコア付けを用いるため、精度よくロボットの適切な注目対象を決定できる。
【0009】
前記注目対象決定部は、後画像における対象が前画像において注目対象である場合に、前記対象の累計注目時間を示す情報に基づいて、前記対象の時間スコアを算出し、後画像における対象が前画像において注目対象でない場合に、予め定められた時間スコアに基づいて、前記対象の時間スコアを算出してもよい。このような構成によって、ロボットが特定の対象を注目対象とすることを抑制できる。
【0010】
前記注目対象決定部は、前記後画像に含まれる前記対象の種別情報に基づいて、それぞれの前記対象に対する種別スコアを決定する種別スコア算出部をさらに備え、さらに前記種別スコアに基づいた優先度に応じて、前記対象の中から前記注目対象を決定してもよい。このような構成によって、対象の注目に関する時間、対象の位置、対象の種別を考慮して、ロボットの適切な注目対象を決定できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
裁判のAI化
1か月前
個人
工程設計支援装置
16日前
個人
フラワーコートA
24日前
個人
情報処理システム
1か月前
個人
情報処理装置
2か月前
個人
検査システム
1か月前
個人
記入設定プラグイン
2か月前
個人
介護情報提供システム
1か月前
個人
設計支援システム
1か月前
個人
設計支援システム
1か月前
個人
携帯情報端末装置
17日前
キヤノン電子株式会社
携帯装置
1か月前
株式会社サタケ
籾摺・調製設備
1か月前
個人
結婚相手紹介支援システム
13日前
個人
不動産売買システム
2か月前
株式会社カクシン
支援装置
1か月前
株式会社アジラ
進入判定装置
2日前
個人
パスポートレス入出国システム
2日前
個人
アンケート支援システム
26日前
個人
備蓄品の管理方法
1か月前
個人
食事受注会計処理システム
3日前
キヤノン株式会社
情報処理装置
1か月前
個人
ジェスチャーパッドのガイド部材
1か月前
キヤノン株式会社
情報処理装置
1か月前
株式会社BONNOU
管理装置
2か月前
サクサ株式会社
中継装置
1か月前
サクサ株式会社
中継装置
27日前
大阪瓦斯株式会社
住宅設備機器
10日前
アスエネ株式会社
排水量管理方法
1か月前
ホシデン株式会社
タッチ入力装置
2か月前
株式会社村田製作所
ラック
12日前
個人
リテールレボリューションAIタグ
23日前
東洋電装株式会社
操作装置
1か月前
株式会社やよい
美容支援システム
6日前
株式会社ワコム
電子消去具
2か月前
株式会社アジラ
移動方向推定装置
25日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ