TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025112554
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024006849
出願日
2024-01-19
発明の名称
位置推定装置および車両制御システム
出願人
本田技研工業株式会社
代理人
個人
,
個人
主分類
B60W
40/02 20060101AFI20250725BHJP(車両一般)
要約
【課題】自車両の走行位置を精度よく推定する。
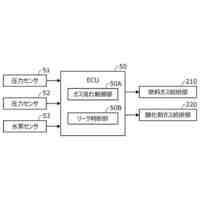
【解決手段】位置推定装置50は、車両の周囲の状況を検出するカメラ1aのカメラ画像に含まれる、車両の周囲の物体の第1特徴点と、地図情報に含まれる物体の第2特徴点と、に基づいて、車両の位置を推定する。位置推定装置とは、カメラ画像から第1特徴点を抽出する特徴点抽出部112と、地図情報とともに、第2特徴点に対応した物体の種別を示す種別情報を記憶する記憶部12と、カメラ画像に基づいて、第1特徴点に対応した物体の種別を認識する種別認識部113と、第1特徴点と、第1特徴点に対応した物体の種別と、記憶部12に記憶された種別情報とに基づいて、地図情報から第1特徴点に対応した第2特徴点を探索する探索部114と、第1特徴点と、探索部114により探索された第2特徴点とに基づいて、自車両の位置を推定する位置推定部115と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
車両の周囲の状況を検出する車載検出器の検出データに含まれる、前記車両の周囲の物体の第1特徴点と、地図情報に含まれる前記物体の第2特徴点と、に基づいて、前記車両の位置を推定する位置推定装置であって、
前記車載検出器の前記検出データから前記第1特徴点を抽出する特徴点抽出部と、
前記地図情報とともに、前記第2特徴点に対応した前記物体の種別を示す種別情報を記憶する記憶部と、
前記車載検出器の前記検出データに基づいて、前記特徴点抽出部により抽出された前記第1特徴点に対応した前記物体の種別を認識する認識部と、
前記特徴点抽出部により抽出された前記第1特徴点と、前記認識部により認識された前記第1特徴点に対応した前記物体の種別と、前記記憶部に記憶された前記種別情報とに基づいて、前記地図情報から前記第1特徴点に対応した前記第2特徴点を探索する探索部と、
前記特徴点抽出部により抽出された前記第1特徴点と、前記探索部により探索された前記第2特徴点とに基づいて、前記車両の位置を推定する位置推定部と、を備えることを特徴とする位置推定装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1記載の位置推定装置において、
前記位置推定部は、前記特徴点抽出部により抽出された前記第1特徴点と前記探索部により探索された前記第2特徴点とに基づき推定した前記車両の位置の誤差を、バンドル調整により最小化することを特徴とする位置推定装置。
【請求項3】
請求項2記載の位置推定装置において、
前記位置推定部は、所定の拘束条件を付加して、前記バンドル調整を実施し、
前記所定の拘束条件は、前記位置推定部により推定された前記車両の位置に基づいて前記地図情報に含まれる前記第2特徴点を前記車載検出器の前記検出データにより示される画像に投影したときに、前記画像上における前記第2特徴点と該第2特徴点に対応する前記物体の垂直距離が最小になるように定義されることを特徴とする位置推定装置。
【請求項4】
請求項1記載の位置推定装置において、
前記記憶部は、異なる外的環境でそれぞれ生成された複数の前記地図情報を、地図生成時の外的環境を表す環境情報に対応付けて記憶し、
前記探索部は、前記環境情報に基づいて、前記車載検出器の前記検出データが取得されたときの外的環境に対応した前記地図情報を前記記憶部から読み出し、読み出した前記地図情報から、前記特徴点抽出部により前記検出データから抽出された前記第1特徴点に対応した前記第2特徴点を探索することを特徴とする位置推定装置。
【請求項5】
請求項1記載の位置推定装置において、
前記位置推定部で推定される前記車両の位置の信頼度が所定程度未満であるか否かを判定する信頼度判定部と、
前記車両が前記地図情報に含まれる道路を走行中に、前記信頼度判定部により前記信頼度が前記所定程度未満であると判定された回数が所定数を超えたとき、前記車両の位置の推定を停止する停止指示を前記位置推定部に出力する停止制御部と、をさらに備えることを特徴とする位置推定装置。
【請求項6】
請求項1記載の位置推定装置において、
前記車両の車両状態を取得する状態取得部と、
前記状態取得部により取得された前記車両状態に基づいて、前記車両の位置の推定を停止する停止指示を前記位置推定部に出力する停止制御部と、をさらに備えることを特徴とする位置推定装置。
【請求項7】
請求項1~6のうちのいずれか1項に記載の位置推定装置と、
走行用アクチュエータと、
前記位置推定部により推定された前記車両の位置に基づいて、前記走行用アクチュエータを制御する走行制御部と、を備えることを特徴とする車両制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両の位置を推定する位置推定装置および車両制御システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、交通の安全性の向上につながり、持続可能な輸送システムの発展に寄与するような車両制御システムが望まれる。この種の装置として、従来、移動体の周囲に存在する物体までの距離を検出し、その検出データと地図データとをマッチングさせて、移動体の自己位置を推定するように構成された装置が知られている(例えば特許文献1参照)。特許文献1記載の装置では、推定された自己位置のずれ量が所定閾値以上になったときに自己位置の推定を開始する基準位置を再設定することで、移動体の周囲の環境が地図データと異なるときに発生し得る推定精度の低下を抑制している。
【先行技術文献】
【特許文献】
【0003】
特開2021-176052号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1記載の装置のように、検出データと地図データとをマッチングさせる手法において、道路の区画線や横断歩道などのように一部の形状が類似する物体が移動体の周囲に存在するとき、検出データと地図データとの誤マッチングが発生し、自己位置の推定精度が低下するおそれがある。
【課題を解決するための手段】
【0005】
本発明の一態様である位置推定装置は、車両の周囲の状況を検出する車載検出器の検出データに含まれる、車両の周囲の物体の第1特徴点と、地図情報に含まれる物体の第2特徴点と、に基づいて、車両の位置を推定する位置推定装置であって、車載検出器の検出データから第1特徴点を抽出する特徴点抽出部と、地図情報とともに、第2特徴点に対応した物体の種別を示す種別情報を記憶する記憶部と、車載検出器の検出データに基づいて、特徴点抽出部により抽出された第1特徴点に対応した物体の種別を認識する認識部と、特徴点抽出部により抽出された第1特徴点と、認識部により認識された第1特徴点に対応した物体の種別と、記憶部に記憶された種別情報とに基づいて、地図情報から第1特徴点に対応した第2特徴点を探索する探索部と、特徴点抽出部により抽出された第1特徴点と、探索部により探索された第2特徴点とに基づいて、車両の位置を推定する位置推定部と、を備える。
【0006】
本発明の他の態様である車両制御システムは、上記の位置推定装置と、走行用アクチュエータと、位置推定部により推定された車両の位置に基づいて、走行用アクチュエータを制御する走行制御部と、を備える。
【発明の効果】
【0007】
本発明によれば、自車両の走行位置を精度よく推定できる。
【図面の簡単な説明】
【0008】
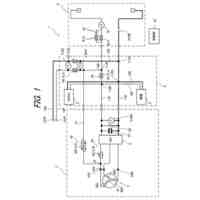
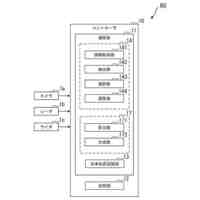
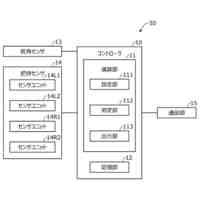
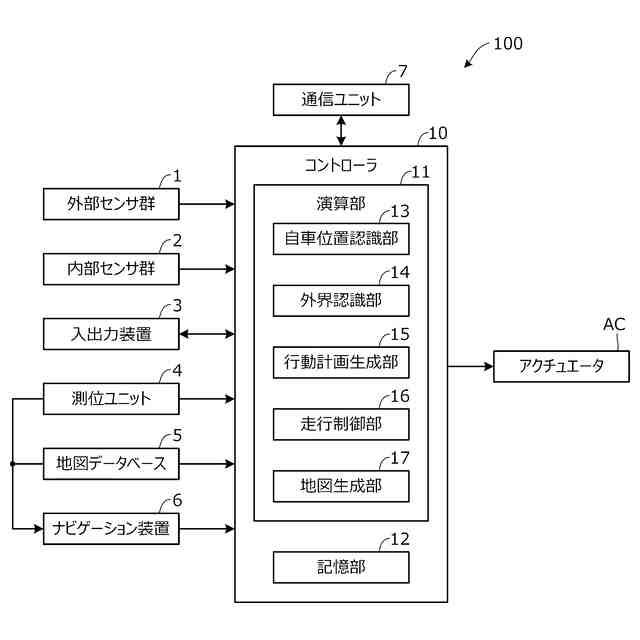
本発明の実施の形態に係る車両制御システムの全体構成を概略的に示すブロック図。
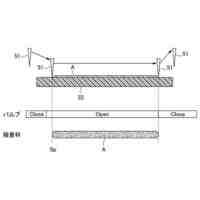
特徴点の対応付けを説明するための図。
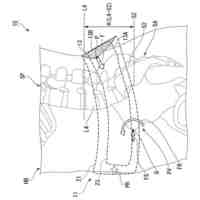
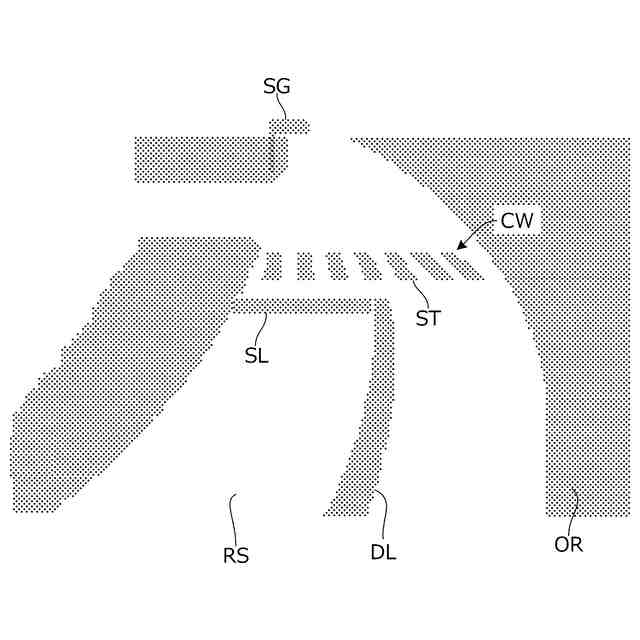
自車両が走行中に車載カメラにより取得されたカメラ画像の一例を示す図。
図3Aのカメラ画像の撮像範囲に対応した環境地図の一例を示す図。
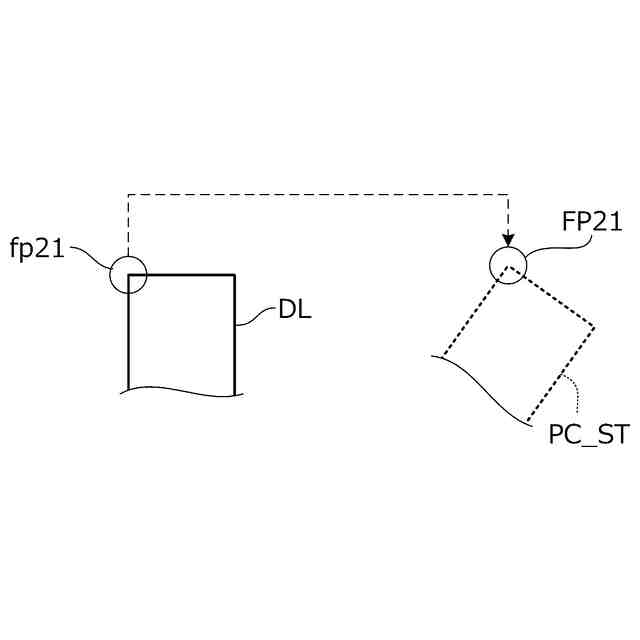
誤マッチングの一例を示す図。
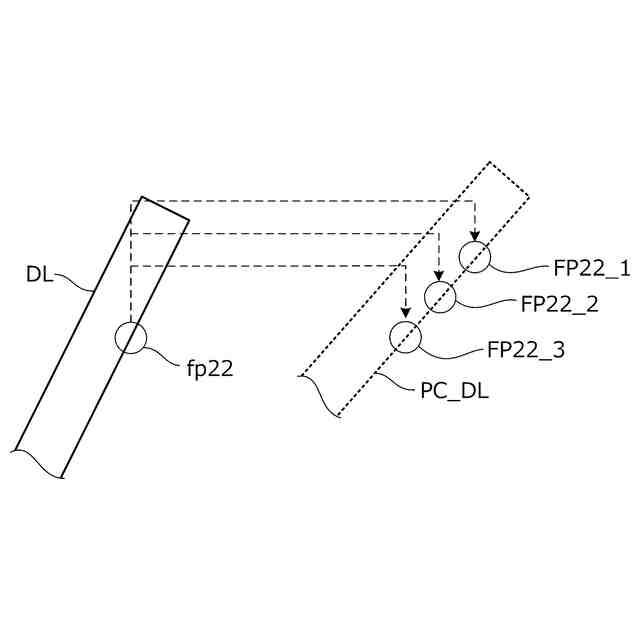
誤マッチングの他の例を示す図。
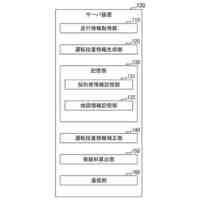
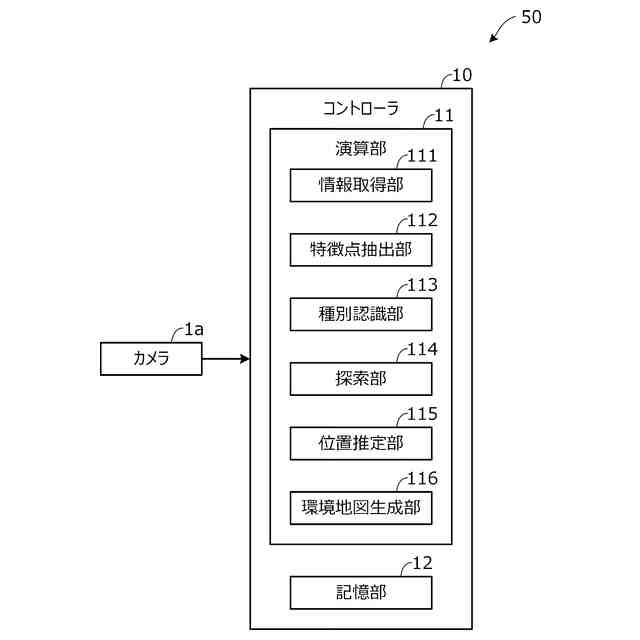
本発明の実施の形態に係る位置推定装置の要部構成を示すブロック図。
物体の種別ごとに領域分割されたカメラ画像を模式的に示す図。
自車両の位置および姿勢の推定誤差を説明するための図。
バンドル調整に付加される拘束条件を説明するための図。
バンドル調整に付加される拘束条件を説明するための図。
図5のコントローラのCPUで実行される処理の一例を示すフローチャート。
【発明を実施するための形態】
【0009】
以下、図面を参照して発明の実施の形態について説明する。本発明の実施の形態に係る位置推定装置は、自動運転機能を有する車両、すなわち自動運転車両に適用することができる。なお、本実施の形態に係る位置推定装置が適用される車両を、他車両と区別して自車両と呼ぶことがある。自車両は、内燃機関(エンジン)を走行駆動源として有するエンジン車両、走行モータを走行駆動源として有する電気自動車、エンジンと走行モータとを走行駆動源として有するハイブリッド車両のいずれであってもよい。自車両は、ドライバによる運転操作が不要な自動運転モードでの走行だけでなく、ドライバの運転操作による手動運転モードでの走行も可能である。
【0010】
まず、自動運転に係る自車両の概略構成について説明する。図1は、本実施の形態に係る位置推定装置を有する自車両の車両制御システム100の全体構成を概略的に示すブロック図である。図1に示すように、車両制御システム100は、コントローラ10と、コントローラ10にそれぞれ通信可能に接続された外部センサ群1と、内部センサ群2と、入出力装置3と、測位ユニット4と、地図データベース5と、ナビゲーション装置6と、通信ユニット7と、走行用のアクチュエータACとを主に有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車両構造
1か月前
本田技研工業株式会社
制御装置
28日前
本田技研工業株式会社
回転電機
7日前
本田技研工業株式会社
回転電機
1か月前
本田技研工業株式会社
回転電機
7日前
本田技研工業株式会社
制御装置
28日前
本田技研工業株式会社
電池パック
1日前
本田技研工業株式会社
鞍乗型車両
21日前
本田技研工業株式会社
蓄電システム
15日前
本田技研工業株式会社
固体二次電池
13日前
本田技研工業株式会社
温調システム
1か月前
本田技研工業株式会社
画像処理装置
5日前
本田技研工業株式会社
電動駆動装置
7日前
本田技研工業株式会社
電動駆動装置
7日前
本田技研工業株式会社
運転評価装置
6日前
本田技研工業株式会社
電動駆動装置
7日前
本田技研工業株式会社
体幹用装着具
2日前
本田技研工業株式会社
電気駆動装置
7日前
本田技研工業株式会社
着座部材構造
28日前
本田技研工業株式会社
情報提供装置
今日
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
鞍乗り型車両
28日前
本田技研工業株式会社
情報提供装置
今日
本田技研工業株式会社
保険料算出装置
6日前
本田技研工業株式会社
非水電解質電池
27日前
本田技研工業株式会社
燃料電池スタック
7日前
本田技研工業株式会社
ステアリング装置
7日前
本田技研工業株式会社
鞍乗り型電動車両
27日前
本田技研工業株式会社
鞍乗り型電動車両
1か月前
本田技研工業株式会社
燃料電池スタック
7日前
本田技研工業株式会社
蓄エネルギー装置
1日前
本田技研工業株式会社
カメラの取付構造
27日前
本田技研工業株式会社
燃料電池システム
今日
本田技研工業株式会社
通話サポート装置
27日前
本田技研工業株式会社
回転電機の制御装置
7日前
本田技研工業株式会社
接着剤塗布システム
14日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ