TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025112363
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024006533
出願日
2024-01-19
発明の名称
走行支援制御装置及び走行支援制御方法
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
B60W
30/08 20120101AFI20250725BHJP(車両一般)
要約
【課題】自車両の前方の対象物との衝突を確実に回避しつつ、過度な回避動作を抑制することができる走行支援制御装置及び走行支援制御方法を提供する。
【解決手段】自車両と自車両の前方に存在する対象物との目標距離を演算し、自車両の速度及び目標距離に基づいて、対象物の後方に設定される進入禁止領域の後方距離を設定し、進入禁止領域に自車両が進入しないようにしつつ、自車両と対象物との距離が、目標距離に近づくように自車両の速度を制御する走行支援制御装置。
【選択図】図1
特許請求の範囲
【請求項1】
自車両と、前記自車両の前方に存在する対象物との目標距離を演算する目標距離演算部と、
前記対象物の少なくとも後方に進入禁止領域を設定する進入禁止領域設定部と、
前記進入禁止領域に前記自車両が進入しないようにしつつ、前記自車両と前記対象物との距離が、前記目標距離に近づくように前記自車両の速度を制御する車両制御部とを備え、
前記進入禁止領域設定部は、前記自車両の速度及び前記目標距離に基づいて、前記対象物の後方に設定される前記進入禁止領域の後方距離を設定する走行支援制御装置。
続きを表示(約 1,500 文字)
【請求項2】
前記進入禁止領域設定部は、前記自車両の速度に猶予時間を乗算した距離を、前記目標距離から減算した距離を、前記進入禁止領域の後方距離として設定する請求項1に記載の走行支援制御装置。
【請求項3】
前記進入禁止領域設定部は、前記目標距離の長さの程度の複数の段階と、前記複数の段階のそれぞれに対応して予め設定された複数の猶予時間の規定値との関係が設定された段階テーブルデータを参照し、現在設定されている前記段階に対応する前記猶予時間の規定値を読み出して、前記猶予時間として設定する請求項2に記載の走行支援制御装置。
【請求項4】
前記進入禁止領域設定部は、前記対象物の速度から前記自車両の速度を減算した前記対象物の相対速度が、負方向に大きくなるに従って、前記進入禁止領域の後方距離を長くし、前記相対速度が、正方向に大きくなるに従って、前記進入禁止領域の後方距離を短くする請求項1に記載の走行支援制御装置。
【請求項5】
前記進入禁止領域設定部は、前記対象物の加速度から前記自車両の加速度を減算した前記対象物の相対加速度が、負方向に大きくなるに従って、前記進入禁止領域の後方距離を長くし、前記相対加速度が、正方向に大きくなるに従って、前記進入禁止領域の後方距離を短くする請求項4に記載の走行支援制御装置。
【請求項6】
前記距離が前記目標距離に到達するまでの将来の各時点の過渡的な目標距離と、自車両の速度が目標速度に到達するまでの将来の各時点の過渡的な目標速度と、を演算する計画生成部を備え、
前記進入禁止領域設定部は、前記目標距離及び将来の各時点の前記過渡的な目標距離に基づいて、将来の各時点の前記進入禁止領域の後方距離を演算する請求項1に記載の走行支援制御装置。
【請求項7】
前記進入禁止領域設定部は、前記目標距離と将来の各時点の前記過渡的な目標距離とのいずれか小さい方を、将来の各時点の前記進入禁止領域の後方距離として設定する請求項6に記載の走行支援制御装置。
【請求項8】
前記進入禁止領域設定部は、前記目標距離と将来の各時点の前記過渡的な目標距離とのいずれか小さい方から、前記自車両の速度に猶予時間を乗算した距離を減算した距離を、将来の各時点の前記進入禁止領域の後方距離として設定する請求項6に記載の走行支援制御装置。
【請求項9】
前記車両制御部は、前記自車両が将来の各時点の前記進入禁止領域の後方距離の範囲に進入しないようにしつつ、前記距離が将来の各時点の前記過渡的な目標距離に近づき、前記自車両の速度が将来の各時点の前記過渡的な目標速度に近づくように、前記自車両の速度を制御する請求項6から8のいずれか一項に記載の走行支援制御装置。
【請求項10】
前記進入禁止領域設定部は、将来の各時点の前記進入禁止領域の後方距離及び将来の各時点の前記過渡的な目標速度に基づいて、将来の各時点の前記進入禁止領域の後方距離を表す代替パラメータとして、将来の各時点の車間時間の下限制限値を演算し、
前記車両制御部は、前記距離及び前記自車両の速度に基づいて算出される前記自車両の車間時間が将来の各時点の前記車間時間の下限制限値よりも小さくならないようにしつつ、前記距離が将来の各時点の前記過渡的な目標距離に近づき、前記自車両の速度が将来の各時点の前記過渡的な目標速度に近づくように、前記自車両の速度を制御する請求項6に記載の走行支援制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この本開示は、走行支援制御装置及び走行支援制御方法に関するものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
近年、車両の速度または操舵を支援する運転支援システムが実用化されている。例えば、特許文献1の技術では、対象物の周囲に進入禁止領域を設定し、進入禁止領域に進入しないように速度または操舵を制御することで、対象物との衝突を回避するように制御する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2016/027347号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術では、一定の車間距離を維持して走行している先行車両が減速した場合、自車両は進入禁止領域に進入しないように即座に回避動作を行う。よって、先行車両のわずかな減速に過敏に反応するため、乗り心地が低下する。また、他車両が隣接車線から自車両の前方に割り込んできた場合、自車両の近傍に設定された進入禁止領域から離脱するために減速または操舵による回避動作を過剰に行い、乗り心地が低下する。
【0005】
そこで、本開示は、自車両の前方の対象物との衝突を確実に回避しつつ、過度な回避動作を抑制することができる走行支援制御装置及び走行支援制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る走行支援制御装置は、
自車両と、前記自車両の前方に存在する対象物との目標距離を演算する目標設定部と、
前記対象物の少なくとも後方に進入禁止領域を設定する進入禁止領域設定部と、
前記進入禁止領域に前記自車両が進入しないようにしつつ、前記自車両と前記対象物との距離が、前記目標距離に近づくように前記自車両の速度を制御する車両制御部とを備え、
前記進入禁止領域設定部は、前記自車両の速度及び前記目標距離に基づいて、前記対象物の後方に設定される前記進入禁止領域の後方距離を設定するものである。
【0007】
本開示に係る走行支援制御装置は、
自車両と、前記自車両の前方に存在する対象物との目標距離を演算する目標設定ステップと、
前記対象物の少なくとも後方に進入禁止領域を設定する進入禁止領域設定ステップと、
前記進入禁止領域に前記自車両が進入しないようにしつつ、前記自車両と前記対象物の距離が、前記目標距離に近づくように前記自車両の速度を制御する車両制御ステップと、を備え、
前記進入禁止領域設定ステップでは、前記自車両の速度及び前記目標距離に基づいて、前記対象物の後方に設定される前記進入禁止領域の後方距離を設定するものである。
【発明の効果】
【0008】
本開示に係る走行支援制御装置及び走行支援制御方法によれば、目標距離と進入禁止領域の後方距離とが個別に設定され、進入禁止領域に自車両が進入しないようにしつつ、自車両と対象物との距離が、目標距離に近づくように自車両の速度が制御される。よって、自車両が進入禁止領域の後方距離の範囲内に進入しない場合は、距離が目標距離に近づくように、乗り心地を考慮して自車両の速度を制御することができ、自車両が進入禁止領域の後方距離の範囲内に進入する可能性がある場合は、自車両が進入禁止領域の後方距離の範囲内に確実に進入しないように自車両の速度を制御することができる。また、進入禁止領域の後方距離は、自車両の速度及び目標距離に基づいて設定されるので、自車両の走行状態及び目標距離の設定状態を考慮して、乗り心地の向上と、衝突の回避の確実性とをバランスさせることができる。従って、自車両の前方の障害物との衝突を確実に回避しつつ、過度な回避動作を抑制して、乗り心地を向上させることができる。
【図面の簡単な説明】
【0009】
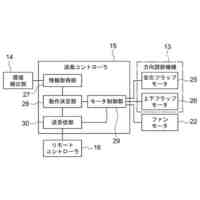
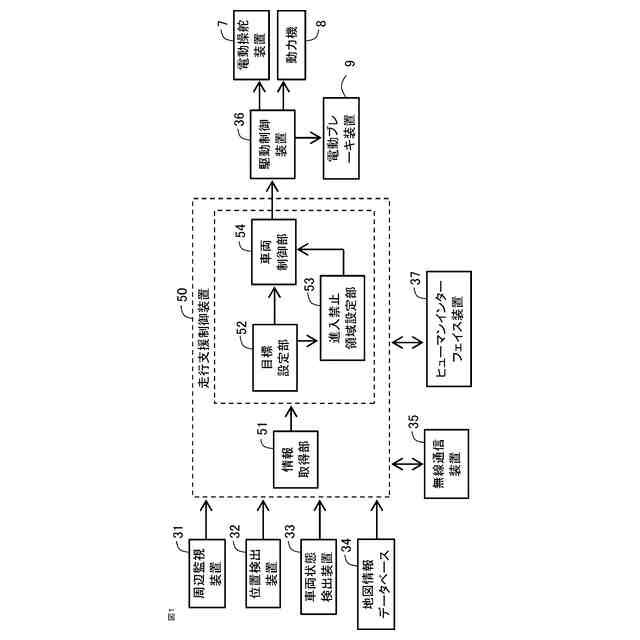
実施の形態1に係る走行支援制御装置の概略ブロック図である。
実施の形態1に係る走行支援制御装置の概略ハードウェア構成図である。
実施の形態1に係る対象物の設定を説明するための図である。
実施の形態1に係る対象物の設定を説明するための図である。
実施の形態1に係る対象物の設定を説明するための図である。
実施の形態1に係る段階テーブルデータを説明するための図である。
実施の形態1に係る制御挙動を説明するためのタイムチャートである。
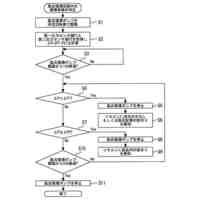
実施の形態1に係る走行支援制御装置の概略的な処理を説明するためのフローチャートである。
実施の形態2に係る制御挙動を説明するためのタイムチャートである。
実施の形態3に係る走行支援制御装置の概略ブロック図である。
実施の形態3に係る制御挙動を説明するためのタイムチャートである。
実施の形態3に係る走行支援制御装置の概略的な処理を説明するためのフローチャートである。
【発明を実施するための形態】
【0010】
1.実施の形態1
実施の形態1に係る走行支援制御装置50について図面を参照して説明する。本実施の形態では、走行支援制御装置50は、自車両に設けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
1か月前
三菱電機株式会社
給湯機
3日前
三菱電機株式会社
吸音体
2か月前
三菱電機株式会社
冷蔵庫
28日前
三菱電機株式会社
ミラー
28日前
三菱電機株式会社
冷蔵庫
2か月前
三菱電機株式会社
冷蔵庫
2か月前
三菱電機株式会社
束線器具
1か月前
三菱電機株式会社
照明器具
1か月前
三菱電機株式会社
送風装置
2か月前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
照明装置
11日前
三菱電機株式会社
梱包装置
1か月前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
照明装置
2か月前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
電源回路
26日前
三菱電機株式会社
電子機器
2か月前
三菱電機株式会社
照明装置
3日前
三菱電機株式会社
送風装置
1か月前
三菱電機株式会社
照明器具
1か月前
三菱電機株式会社
照明装置
2か月前
三菱電機株式会社
電気接続部
25日前
三菱電機株式会社
半導体装置
2か月前
三菱電機株式会社
加熱調理器
2か月前
三菱電機株式会社
電気掃除機
2か月前
三菱電機株式会社
電気掃除機
1か月前
三菱電機株式会社
加熱調理器
19日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
飛しょう体
6日前
三菱電機株式会社
半導体装置
6日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
漏電遮断器
1か月前
三菱電機株式会社
浴室乾燥機
1か月前
三菱電機株式会社
半導体装置
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ