TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103946
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221709
出願日
2023-12-27
発明の名称
加工機械、加工機械の制御装置および加工機械の制御方法
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
G05B
19/4155 20060101AFI20250702BHJP(制御;調整)
要約
【課題】加工プログラムを用意することなくワークを加工する。
【解決手段】目標特定部は、深度カメラがワークの目標形状を表すサンプルを撮像した第一深度画像に基づいて目標形状を特定する。位置計測部は、深度カメラが前記ワークを撮像した第二深度画像に基づいて、ワークの表面の三次元位置を計算する。位置合わせ部は、ワークの目標形状を表す三次元データとワークの三次元位置とに基づいて、ワークと目標形状とを重ね合わせたときの目標形状の三次元位置を計算する。切込量決定部は、ワークを所定の視点から見たときのワークの表面の三次元位置と目標形状の表面の三次元位置との視線方向における差に基づいてワークの表面上の複数の点それぞれにおける切込量を決定する。工具制御部は、決定された切込量に基づいて工具を移動させる。
【選択図】図1
特許請求の範囲
【請求項1】
ワークを機械加工する工具と、
撮像範囲に前記ワークが入るように設置され、被写体の深度を撮像する深度カメラと、
前記深度カメラが前記ワークの目標形状を表すサンプルを撮像した第一深度画像に基づいて前記目標形状を特定する目標特定部と、
前記深度カメラが前記ワークを撮像した第二深度画像に基づいて、前記ワークの表面の三次元位置を計算する位置計測部と、
前記目標形状と前記ワークの三次元位置とに基づいて、前記ワークと前記目標形状とを重ね合わせたときの前記目標形状の三次元位置を計算する位置合わせ部と、
前記ワークを所定の視点から見たときの前記ワークの表面の三次元位置と前記目標形状の表面の三次元位置との視線方向における差に基づいて前記ワークの表面上の複数の点それぞれにおける切込量を決定する切込量決定部と、
決定された前記切込量に基づいて前記工具を移動させる工具制御部と
を備える加工機械。
続きを表示(約 1,400 文字)
【請求項2】
前記深度カメラの撮像範囲に非周期的なパターンの像を投影するプロジェクタを備え、
前記深度カメラはステレオカメラであって、前記プロジェクタが前記像を投影しているときに前記被写体を撮像する
請求項1に記載の加工機械。
【請求項3】
前記第一深度画像は、前記ワークの上に載置された前記サンプルを撮像した深度画像であって、
前記目標特定部は、前記第一深度画像から特定される前記ワークと前記サンプルとが一体となった三次元形状の底部を高さ方向に除去することで、前記目標形状を特定する
請求項1に記載の加工機械。
【請求項4】
前記目標特定部は、前記第一深度画像の前記目標形状の高さと、前記ワークの高さとの差だけ、前記底部を高さ方向に除去することで、前記目標形状を特定する
請求項3に記載の加工機械。
【請求項5】
前記目標特定部は、前記第一深度画像から特定される前記サンプルの三次元形状の下に、前記ワークの底部の形状を加えることで、前記目標形状を特定する
請求項1に記載の加工機械。
【請求項6】
ワークを機械加工する工具と、撮像範囲に前記ワークが入るように設置され、被写体の深度を撮像する深度カメラと、前記工具を駆動させるアクチュエータとを備える加工機械の制御装置であって、
前記深度カメラが前記ワークの目標形状を表すサンプルを撮像した第一深度画像に基づいて前記目標形状を特定する目標特定部と、
前記深度カメラが前記ワークを撮像した第二深度画像に基づいて、前記ワークの表面の三次元位置を計算する位置計測部と、
前記目標形状と前記ワークの三次元位置とに基づいて、前記ワークと前記目標形状とを重ね合わせたときの前記目標形状の三次元位置を計算する位置合わせ部と、
前記ワークを所定の視点から見たときの前記ワークの表面の三次元位置と前記目標形状の表面の三次元位置との視線方向における差に基づいて前記ワークの表面上の複数の点それぞれにおける切込量を決定する切込量決定部と、
決定された前記切込量に基づいて前記アクチュエータを制御する工具制御部と
を備える加工機械の制御装置。
【請求項7】
ワークを機械加工する工具と、撮像範囲に前記ワークが入るように設置され、被写体の深度を撮像する深度カメラと、前記工具を駆動させるアクチュエータとを備える加工機械の制御方法であって、
前記深度カメラが前記ワークの目標形状を表すサンプルを撮像した第一深度画像に基づいて前記目標形状を特定するステップと、
前記深度カメラが前記ワークを撮像した第二深度画像に基づいて、前記ワークの表面の三次元位置を計算するステップと、
前記目標形状と前記ワークの三次元位置とに基づいて、前記ワークと前記目標形状とを重ね合わせたときの前記目標形状の三次元位置を計算するステップと、
前記ワークを所定の視点から見たときの前記ワークの表面の三次元位置と前記目標形状の表面の三次元位置との視線方向における差に基づいて前記ワークの表面上の複数の点それぞれにおける切込量を決定するステップと、
決定された前記切込量に基づいて前記アクチュエータを制御するステップと
を備える加工機械の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、加工機械、加工機械の制御装置および加工機械の制御方法
に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
加工機械の制御装置は、ワークの加工に用いる加工プログラムを読み取り、当該プログラムの実行によって加工機械を駆動させることで、ワークを所望の形状に切削する。これに対し、特許文献1には、加工プログラムを用意することなくワークを加工することができる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-113305号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に係る制御装置によれば、加工機械を制御するために、目標形状を表す三次元データを用意しておく必要がある。一方で、目標形状のサンプルが手元にあるが、三次元データがないことがある。
本開示の目的は、現実のサンプルに基づいて、当該サンプルが表す目標形状に従ってワークを加工することができる加工機械、加工機械の制御装置および加工機械の制御方法を提供することにある。
【課題を解決するための手段】
【0005】
本発明の一態様によれば、加工機械は、ワークを機械加工する工具と、撮像範囲に前記ワークが入るように設置され、被写体の深度を撮像する深度カメラと、前記深度カメラが前記ワークの目標形状を表すサンプルを撮像した第一深度画像に基づいて前記目標形状を特定する目標特定部と、前記深度カメラが前記ワークを撮像した第二深度画像に基づいて、前記ワークの表面の三次元位置を計算する位置計測部と、前記目標形状と前記ワークの三次元位置とに基づいて、前記ワークと前記目標形状とを重ね合わせたときの前記目標形状の三次元位置を計算する位置合わせ部と、前記ワークを所定の視点から見たときの前記ワークの表面の三次元位置と前記目標形状の表面の三次元位置との視線方向における差に基づいて前記ワークの表面上の複数の点それぞれにおける切込量を決定する切込量決定部と、決定された前記切込量に基づいて前記工具を移動させる工具制御部とを備える。
【発明の効果】
【0006】
上記態様によれば、現実のサンプルに基づいて、当該サンプルが表す目標形状に従ってワークを加工することができる。
【図面の簡単な説明】
【0007】
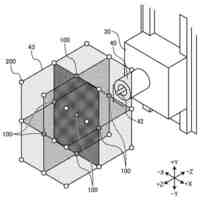
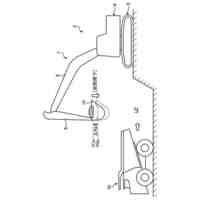
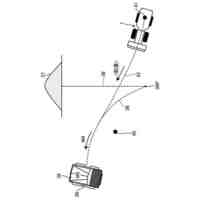
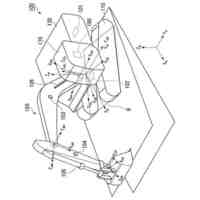
第一の実施形態に係る加工機械の斜視図である。
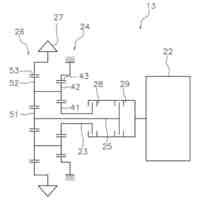
第一の実施形態に係るロボットアームの構成を示す斜視図である。
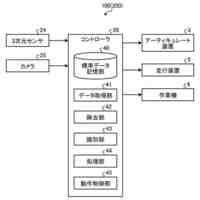
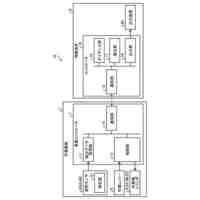
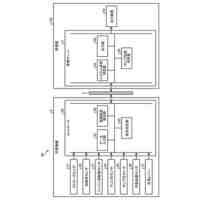
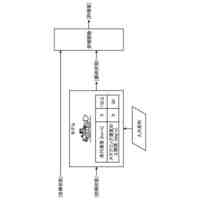
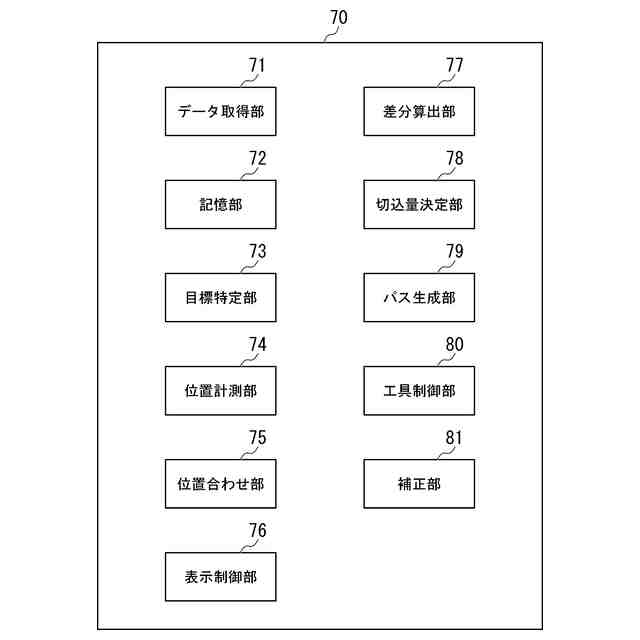
第一の実施形態に係る制御装置の構成を示す概略ブロック図である。
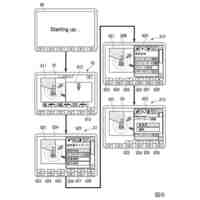
第一の実施形態に係る表示画面の一例である。
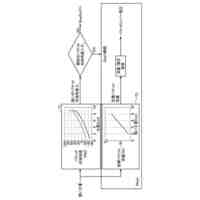
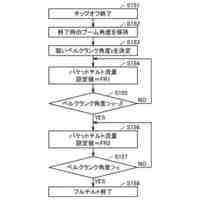
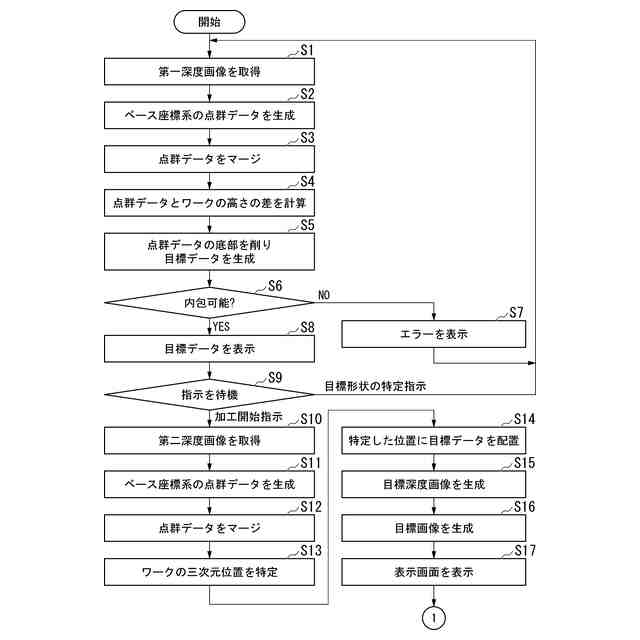
第一の実施形態に係る制御装置による加工機械の制御方法を示すフローチャート(パート1)である。
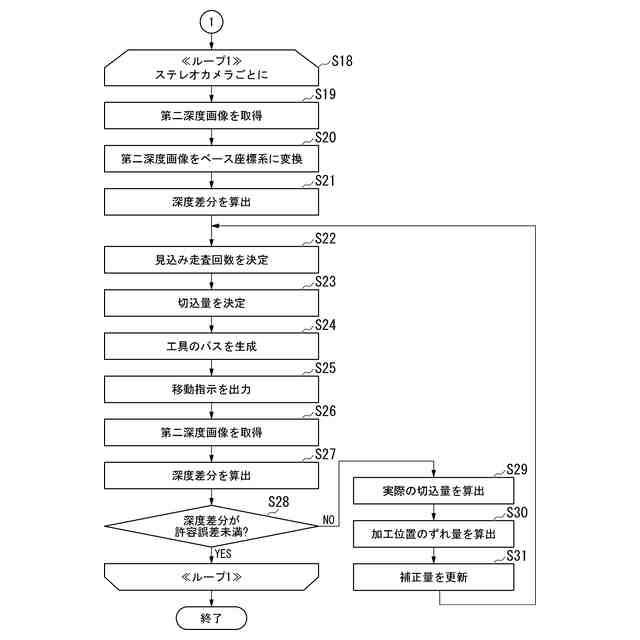
第一の実施形態に係る制御装置による加工機械の制御方法を示すフローチャート(パート2)である。
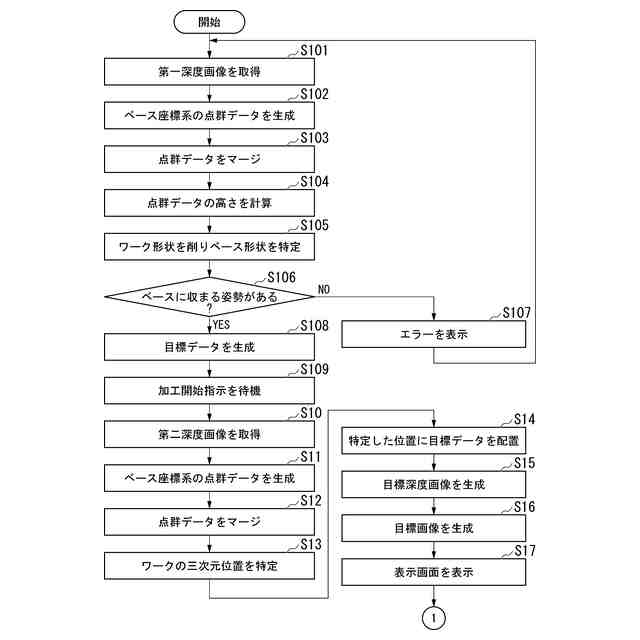
第二の実施形態に係る制御装置による加工機械の制御方法を示すフローチャートである。
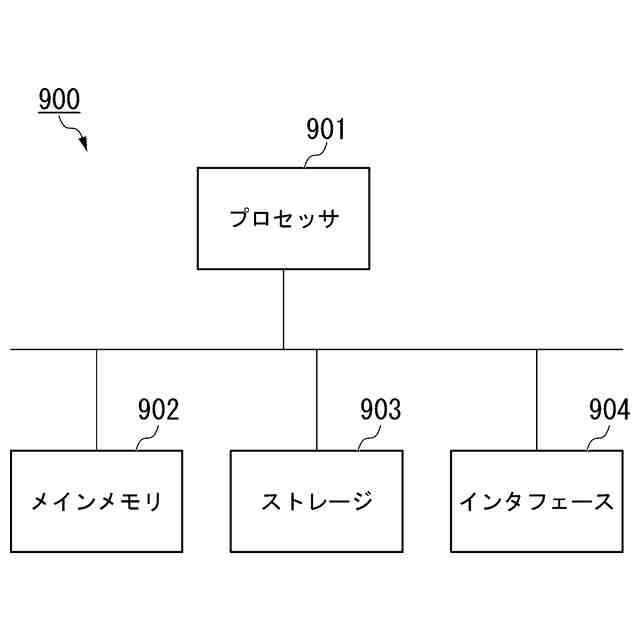
少なくとも1つの実施形態に係るコンピュータの構成を示す概略ブロック図である。
【発明を実施するための形態】
【0008】
〈第一の実施形態〉
《加工機械1の構成》
以下、図面を参照しながら実施形態について詳しく説明する。
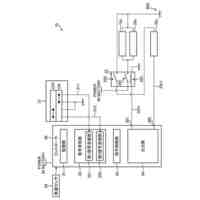
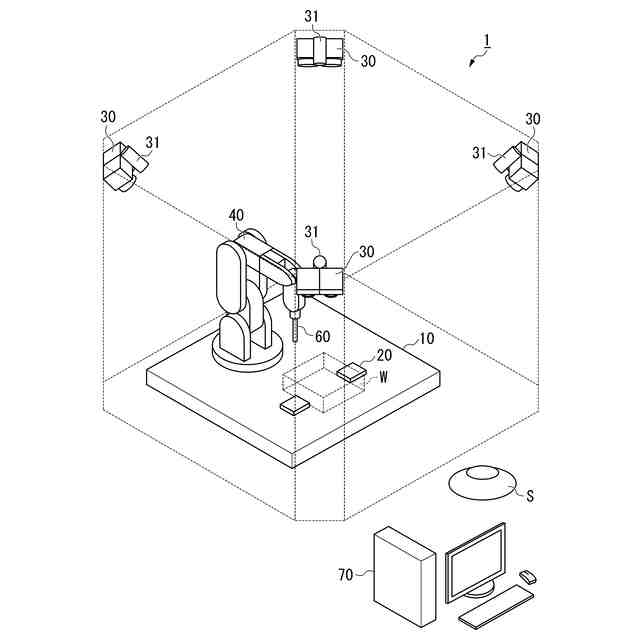
図1は、第一の実施形態に係る加工機械の斜視図である。加工機械1は、テーブル10、治具20、複数のステレオカメラ30、複数のプロジェクタ31、ロボットアーム40、工具60、制御装置70を備える。他の実施形態においては、加工機械1は、例えばマシニングセンタであってもよい。第一の実施形態に係る加工機械1は、利用者によって用意されたサンプルSの形状を認識し、ワークWからサンプルSの形状を削り出す。サンプルSは切削の目標形状を表す。
【0009】
テーブル10は、加工機械1の基台である。治具20は、テーブル10の上に設けられる。治具20はワークWを挟み込むことで支持する。
【0010】
ステレオカメラ30は、撮像範囲に含まれる被写体の深度画像を撮像する。ステレオカメラ30は、深度カメラの一例である。ステレオカメラ30は、撮像範囲にワークWの設置領域が含まれるように設けられる。ステレオカメラ30は、例えば加工機械1の内壁に、テーブル10を見下ろすように設置される。ステレオカメラ30は、テーブル10との相対位置が変化しないよう、熱膨張が生じ難い材料で構成される治具で固定されることが好ましい。複数のステレオカメラ30は、互いに死角を補うように配置される。図1に示す例では、加工機械1は4つのステレオカメラ30を備え、4方向から深度画像を撮像することができる。なお、他の実施形態においては、ステレオカメラ30は1つでも複数でもよい。また、4方向ではなく2方向や1方向から深度画像を計測してもよい。ステレオカメラ30は加工機械1を覆う略直方体の筐体の天井の四隅に取り付けられている。なお、ステレオカメラ30は加工機械1に対して固定されていればよいため、筐体に限らず、例えば4本の柱に固定されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業機械
4日前
株式会社小松製作所
回転電機及び作業機械
24日前
株式会社小松製作所
識別システム及び識別方法
24日前
株式会社小松製作所
ロータ、回転電機及び作業機械
29日前
株式会社小松製作所
ステータ、回転電機及び作業機械
24日前
株式会社小松製作所
作業機械および作業機械の制御方法
1か月前
株式会社小松製作所
作業機械、及び、トランスファ装置
9日前
株式会社小松製作所
表示システム、表示方法及び作業機械
10日前
株式会社小松製作所
表示システム、情報端末、及び表示方法
24日前
株式会社小松製作所
作業機械を制御するためのシステム及び方法
3日前
株式会社小松製作所
産業機械の熱変位補正装置及び熱変位補正方法
25日前
株式会社小松製作所
作業機械用ファイナルドライブおよび作業機械
10日前
株式会社小松製作所
作業機械の計測システム及び作業機械の計測方法
1か月前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
18日前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
11日前
株式会社小松製作所
作業機械の制御システム及び作業機械の制御方法
1か月前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
4日前
株式会社小松製作所
作業機械の制御システム、作業機械、及び作業機械の制御方法
24日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
4日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
5日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
5日前
株式会社小松製作所
作業機械の遠隔操作システム、作業機械の遠隔コントローラ、及び作業機械の遠隔操作方法
5日前
株式会社小松製作所
転倒評価システム、転倒評価方法及び作業機械
9日前
株式会社小松製作所
作業機械の表示システムおよび作業機械の表示方法
1か月前
個人
生産早送り装置
25日前
株式会社豊田自動織機
産業車両
15日前
株式会社FUJI
工作機械
2か月前
株式会社カネカ
製造システム
1日前
株式会社ダイヘン
移動体
2か月前
愛知製鋼株式会社
車両用システム
9日前
株式会社FUJI
加工機械ライン
1か月前
個人
作業車両自動化システム
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
ローム株式会社
半導体集積回路
2か月前
三栄ハイテックス株式会社
基準電圧回路
3か月前
トヨタ自動車株式会社
ペダル機構
3か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ