TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103409
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023220775
出願日
2023-12-27
発明の名称
数値制御装置、工作機械、制御方法及び制御プログラム
出願人
ブラザー工業株式会社
代理人
個人
,
個人
主分類
G05B
19/416 20060101AFI20250702BHJP(制御;調整)
要約
【課題】扉の開閉時間を短縮しつつ扉と駆動部が離脱するのを抑制できる数値制御装置、工作機械、制御方法及び制御プログラムを提供する。
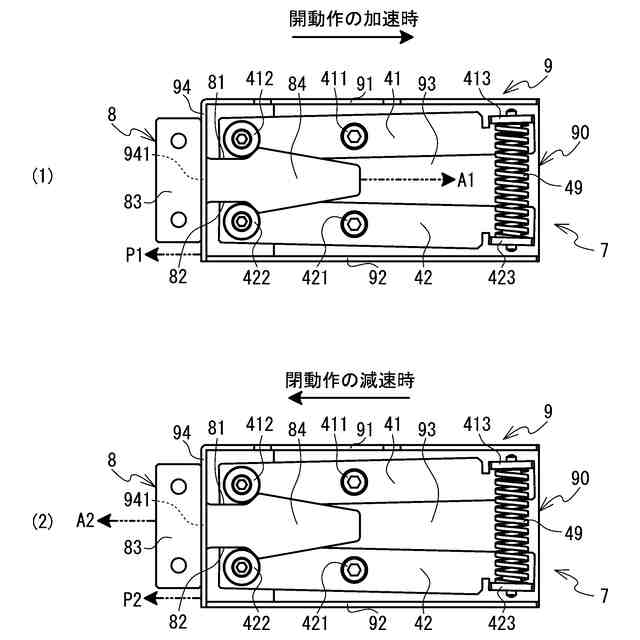
【解決手段】離脱部7は扉に固定された受部9をキー8と連結させる連結状態と、受部9をキー8から離脱させる離脱状態とに変位可能である。キー8はモータの動力で駆動する。キー8を受部9側に移動して扉を駆動する時、扉を加速するとキー8は受部9側に押し込まれるので離脱部7は連結状態を維持できる。駆動中の扉を急に減速すると、受部9が慣性の働きでキー8から離れてしまい離脱部7が離脱状態になり易い。数値制御装置はキー8を受部9側に移動させて扉を駆動する時、開動作加速時定数と開動作減速時定数を設定する。開動作加速時定数は扉を加速して駆動するときに設定し、開動作減速時定数は扉を減速して駆動するときに設定する。開動作加速時定数は開動作減速時定数よりも小さい。
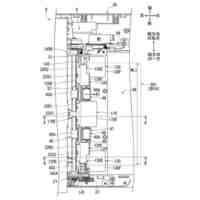
【選択図】図8
特許請求の範囲
【請求項1】
開閉可能な扉を駆動する駆動部を備える工作機械の動作を制御する数値制御装置において、
前記駆動部が前記扉を駆動するときの制御パラメータを設定する設定部と、
前記設定部が設定した前記制御パラメータに基づき前記駆動部を制御する制御部と
を備えたことを特徴とする数値制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記制御パラメータは、前記駆動部が前記扉を駆動するときの速度に関連するものであること
を特徴とする請求項1に記載の数値制御装置。
【請求項3】
前記制御パラメータは、前記駆動部が前記扉を加減速して駆動するときの加速度であること
を特徴とする請求項2に記載の数値制御装置。
【請求項4】
前記制御パラメータは前記加速度を規定する為の時定数であること
を特徴とする請求項3に記載の数値制御装置。
【請求項5】
前記駆動部は前記扉と連結する連結部を備え、
前記工作機械は、前記扉を前記連結部と連結させる連結状態と、前記扉を前記連結部から離脱させる離脱状態とに変位可能な離脱部を備え、
前記時定数は、
前記離脱部が前記連結状態で前記連結部を前記扉側に移動させることによって、前記扉を加減速して駆動するときの第1時定数を有し、
前記第1時定数は、
前記扉を加速して駆動するときの第1加速時定数と、
前記扉を減速して駆動するときの第1減速時定数と
を備え、
前記第1加速時定数は前記第1減速時定数よりも小さいこと
を特徴とする請求項4に記載の数値制御装置。
【請求項6】
前記連結部を前記扉側に移動させる方向とは、前記駆動部が前記扉を開く方向であることを特徴とする請求項5に記載の数値制御装置。
【請求項7】
前記駆動部は前記扉と連結する連結部を備え、
前記工作機械は、前記扉を前記連結部と連結させる連結状態と、前記扉を前記連結部から離脱させる離脱状態とに変位可能な離脱部を備え、
前記時定数は、
前記離脱部が前記連結状態で前記連結部を前記扉側とは反対側に移動させることによって、前記扉を加減速して駆動するときの第2時定数を有し、
前記第2時定数は、
前記扉を加速して駆動するときの第2加速時定数と、
前記扉を減速して駆動するときの第2減速時定数と
を備え、
前記第2減速時定数は前記第2加速時定数よりも小さいこと
を特徴とする請求項4から6の何れか一に記載の数値制御装置。
【請求項8】
前記連結部を前記扉側とは反対側に移動させる方向とは、前記駆動部が前記扉を閉じる方向であること
を特徴とする請求項7に記載の数値制御装置。
【請求項9】
開閉可能な扉を駆動する駆動部と、
前記駆動部が前記扉を駆動するときの制御パラメータを設定する設定部と、
前記設定部が設定した前記制御パラメータに基づき前記駆動部を制御する制御部と
を備えたことを特徴とする工作機械。
【請求項10】
開閉可能な扉を駆動する駆動部を備える工作機械の動作を制御する数値制御装置の制御方法において、
前記駆動部が前記扉を駆動するときの前記駆動部の制御パラメータを設定する設定ステップと、
前記設定ステップにて設定した前記制御パラメータに基づき前記駆動部を制御する制御ステップと
を備えたことを特徴とする制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、数値制御装置、工作機械、制御方法及び制御プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
自動で開閉する扉が干渉物と接触したときに、扉を扉の駆動部から離脱させる扉開閉装置が知られている(例えば特許文献1参照)。扉開閉装置は扉と駆動部と離脱部を備える。扉は直動して開閉する。駆動部は扉を直動させる。離脱部は扉を駆動部と連結させる連結状態と、扉を駆動部から離脱させる離脱状態に変位でき、キーと受部を備える。キーは駆動部に固定され、受部は扉に固定される。
【先行技術文献】
【特許文献】
【0003】
実用新案登録第3229280号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自動化に伴い扉の開閉時間を短くする為に開閉速度を上げると、駆動部と扉が離脱するという問題点があった。例えば連結状態から離脱する方向に扉が急に動く場合や、一定速度で扉が移動している状態から急に停止する場合、扉に作用する力が急激に働く。この場合、現状を維持する力が勝ることから扉が離脱する。故に扉の開閉速度を上げることができないので、扉の開閉時間を短縮するのが困難であった。
【0005】
本発明の目的は、扉の開閉時間を短縮しつつ扉と駆動部が離脱するのを抑制できる数値制御装置、工作機械、制御方法及び制御プログラムを提供することである。
【課題を解決するための手段】
【0006】
請求項1の数値制御装置は、開閉可能な扉を駆動する駆動部を備える工作機械の動作を制御する数値制御装置において、前記駆動部が前記扉を駆動するときの制御パラメータを設定する設定部と、前記設定部が設定した前記制御パラメータに基づき前記駆動部を制御する制御部とを備えたことを特徴とする。故に数値制御装置は扉を自動で開閉させるときの動作条件を制御パラメータで設定できる。例えば扉を安全且つ高速で駆動させる為、駆動開始時は緩やかに速度を上昇させ、駆動終了時は緩やかに速度を落とすこともできる。また扉を開くときと閉じるときとで扉の動作条件を変えることもできる。
【0007】
請求項2の数値制御装置において、前記制御パラメータは、前記駆動部が前記扉を駆動するときの速度に関連するものであってもよい。制御パラメータは扉を駆動するときの速度に関連するものなので、扉の速度を調節できる。
【0008】
請求項3の数値制御装置において、前記制御パラメータは、前記駆動部が前記扉を加減速して駆動するときの加速度であってもよい。制御パラメータは扉を加減速して駆動するときの加速度なので、扉の加減速を調節できる。
【0009】
請求項4の数値制御装置において、前記制御パラメータは前記加速度を規定する為の時定数であってもよい。制御パラメータは加速度を規定する為の時定数なので、扉の加速度を調節できる。
【0010】
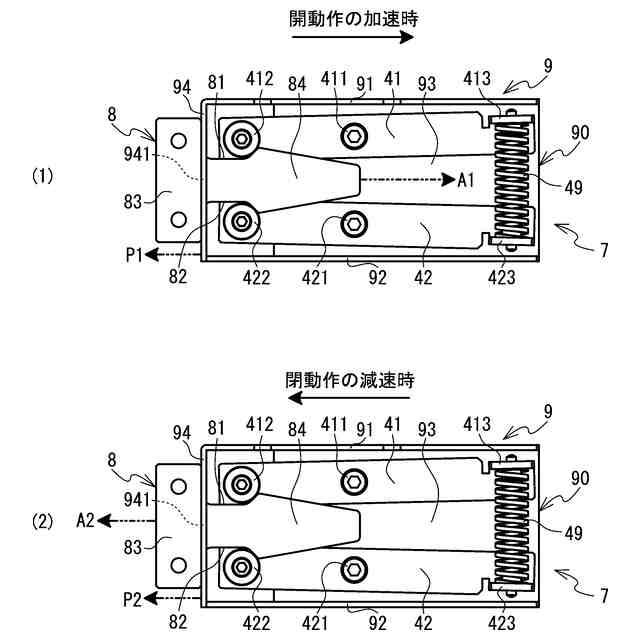
請求項5の数値制御装置の前記駆動部は前記扉と連結する連結部を備え、前記工作機械は、前記扉を前記連結部と連結させる連結状態と、前記扉を前記連結部から離脱させる離脱状態とに変位可能な離脱部を備え、前記時定数は、前記離脱部が前記連結状態で前記連結部を前記扉側に移動させることによって、前記扉を加減速して駆動するときの第1時定数を有し、前記第1時定数は、前記扉を加速して駆動するときの第1加速時定数と、前記扉を減速して駆動するときの第1減速時定数とを備え、前記第1加速時定数は前記第1減速時定数よりも小さくしてもよい。工作機械は例えば扉とモノが接触した際に、扉と駆動部の動力が切り離せるように離脱部を備える。そのような工作機械において、離脱部が連結状態で連結部を扉側に移動させることによって扉を駆動する場合、扉を加速すると連結部は扉側に押し込まれるので、離脱部は連結状態を維持できる。これに対し、駆動中の扉を急に減速すると、扉が慣性の働きで連結部から離れてしまい離脱部が離脱状態になる可能性がある。本発明は、離脱部が連結状態で連結部を扉側に移動させることによって扉を駆動するときの第1時定数として、第1加減速時定数と第1減速時定数を設定できる。第1加速時定数は第1減速時定数よりも小さいことから、加速時においては減速時よりも短時間で扉を駆動でき、減速時においては扉と連結部が離脱しないように扉を駆動できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ブラザー工業株式会社
シート搬送装置
今日
ブラザー工業株式会社
スキャナ及びスキャナのためのコンピュータプログラム
今日
ブラザー工業株式会社
制御装置、制御装置のためのコンピュータプログラム、及び、制御装置によって実行される方法
2日前
ブラザー工業株式会社
制御装置、スキャナ、制御装置のためのコンピュータプログラム、及び、制御装置によって実行される方法
今日
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
21日前
個人
作業車両自動化システム
2日前
愛知製鋼株式会社
目標軌跡の設定方法
10日前
ローム株式会社
半導体集積回路
2か月前
三栄ハイテックス株式会社
基準電圧回路
2か月前
トヨタ自動車株式会社
生産管理システム
7日前
トヨタ自動車株式会社
ペダル機構
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
今日
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
株式会社鷺宮製作所
制御装置
1か月前
株式会社オプトン
制御プログラム生成装置
1か月前
三菱電機株式会社
自己位置推定装置
2か月前
トヨタ自動車株式会社
減圧弁
4日前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
マーク ヘイリー
消防ロボット
14日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社テイエルブイ
減圧弁の制御装置
16日前
アズビル株式会社
制御システムおよび制御方法
10日前
アズビル株式会社
制御システムおよび制御方法
10日前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
WHILL株式会社
電動モビリティ
2か月前
三菱電機株式会社
電源回路
1か月前
オムロン株式会社
安全装置
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ