TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025102858
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2025052784,2021008172
出願日
2025-03-27,2021-01-21
発明の名称
車両映像に基づく車間距離の測定方法、車間距離測定装置、電子機器、コンピュータプログラム、及びコンピュータ読み取り可能な記録媒体
出願人
シンクウェア コーポレーション
,
THINKWARE CORPORATION
代理人
TRY国際弁理士法人
主分類
G01C
3/06 20060101AFI20250701BHJP(測定;試験)
要約
【課題】対象車両と自車との間の距離を測定する、車両映像に基づく車間距離の測定方法を提供する。
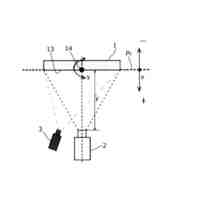
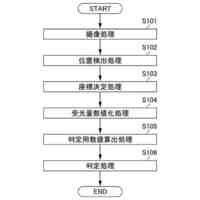
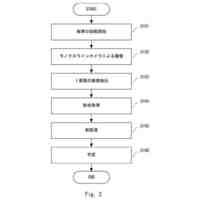
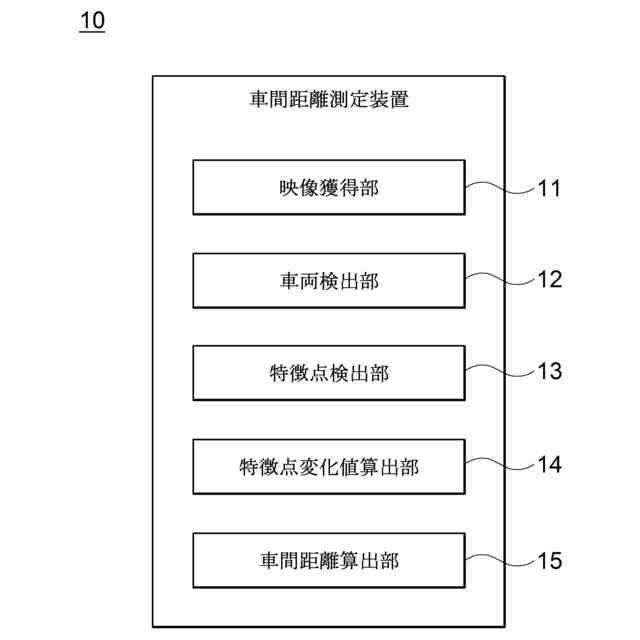
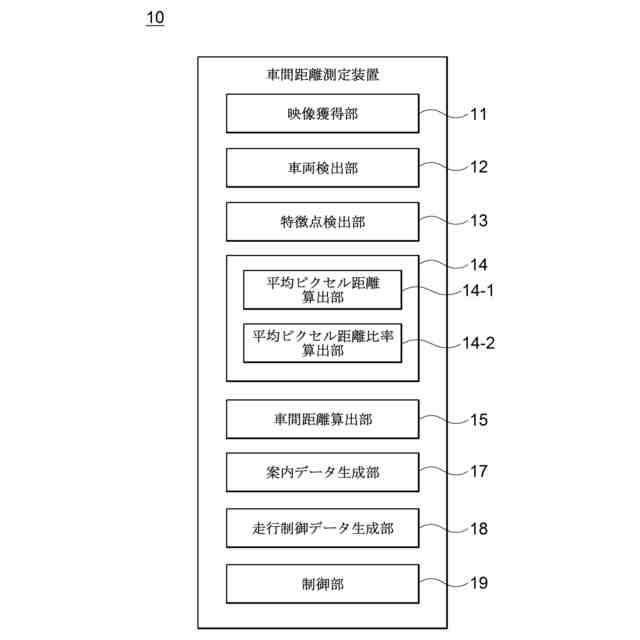
【解決手段】走行中の第1車両の撮影装置により撮影された走行映像を獲得する映像獲得部11と、獲得された走行映像から第2車両を検出する車両検出部12と、走行映像から第2車両が検出されないと、走行映像を構成する複数のフレームのうち、第2車両が検出されなかったフレーム前の、第2車両が検出されたフレームに対応する第1フレームから第2車両領域の第1特徴点を検出し、検出された第1特徴点を追跡することで、現在のフレームに対応する第2フレーム内の第2特徴点を検出する特徴点検出部13と、第1特徴点と第2特徴点との特徴点変化値を算出する特徴点変化値算出部14と、算出された特徴点変化値に基づいて、第1車両の撮影装置から第2車両までの距離を算出する車間距離算出部15と、を含む。
【選択図】図3
特許請求の範囲
【請求項1】
プロセッサを用いた車間距離の測定方法であって、
走行中の第1車両の撮影装置により撮影された走行映像を獲得するステップと、
前記獲得された走行映像から第2車両を検出するステップと、
前記走行映像から前記第2車両が検出されないと、前記走行映像を構成する複数のフレームのうち、前記第2車両が検出されなかったフレーム前の、前記第2車両が検出されたフレームに対応する第1フレームから、前記第2車両の第2車両領域の第1特徴点を検出するステップと、
前記検出された第1特徴点を追跡することで、現在のフレームに対応する第2フレーム内の第2特徴点を検出するステップと、
前記第1特徴点と前記第2特徴点との特徴点変化値を算出するステップと、
前記算出された特徴点変化値に基づいて、前記第1車両の撮影装置から前記第2車両までの車間距離を算出するステップと、を含む、車間距離の測定方法。
続きを表示(約 1,600 文字)
【請求項2】
前記第2車両を検出するステップでは、
車両映像に対するマシンラーニング(Machine Learning)またはディープラーニング(Deep Learning)により構築された学習モデルを用いて前記第2車両を検出することを特徴とする、請求項1に記載の車間距離の測定方法。
【請求項3】
前記第1特徴点を検出するステップでは、
前記第1車両と前記第2車両との間の距離が近接するにつれて、前記構築された学習モデルを用いて前記第2車両が検出されないと、前記第2車両領域の第1特徴点を検出するステップを行うことを特徴とする、請求項2に記載の車間距離の測定方法。
【請求項4】
前記第1特徴点を検出するステップでは、
フレームにおける第2車両領域において、車両の中間領域を関心領域と設定し、前記設定された関心領域から前記第1特徴点を検出することを特徴とする、請求項1から3の何れか一項に記載の車間距離の測定方法。
【請求項5】
前記第2特徴点を検出するステップでは、
前記検出された第1特徴点のオプティカルフロー(optical flow)を用いて前記第2特徴点を追跡することで、前記第2フレーム内の前記第2特徴点を検出することを特徴とする、請求項1から4の何れか一項に記載の車間距離の測定方法。
【請求項6】
前記オプティカルフローを用いて前記第2特徴点を追跡する際に、前記第2フレーム内に表出されない第2特徴点、及び前記第2フレーム内に表出されない第2特徴点に対応する第1特徴点をフィルタリングするステップをさらに含むことを特徴とする、請求項5に記載の車間距離の測定方法。
【請求項7】
前記特徴点変化値を算出するステップは、
前記第1特徴点の平均ピクセル位置を算出するステップと、
前記算出された第1特徴点の平均ピクセル位置からそれぞれの第1特徴点までのピクセル距離を平均化した第1平均ピクセル距離を算出するステップと、
前記第2特徴点の平均ピクセル位置を算出するステップと、
前記算出された第2特徴点の平均ピクセル位置からそれぞれの第2特徴点までの距離を平均化した第2平均ピクセル距離を算出するステップと、
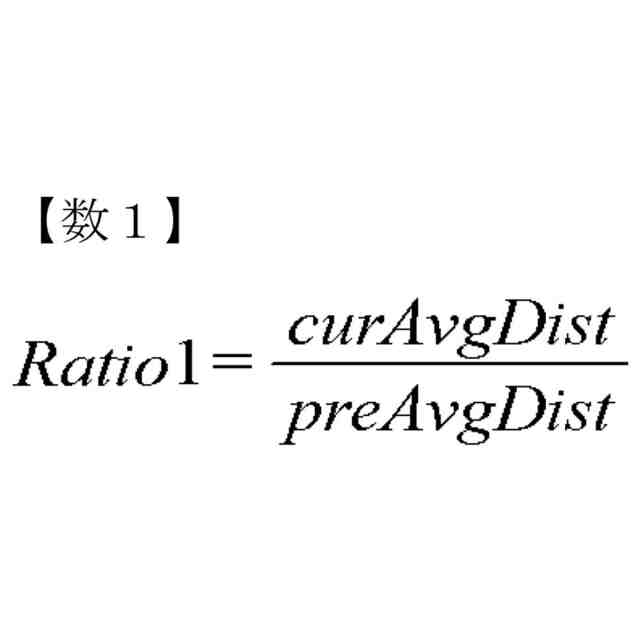
前記第1平均ピクセル距離と前記第2平均ピクセル距離との平均ピクセル距離比率を算出するステップと、を含むことを特徴とする、請求項1から6の何れか一項に記載の車間距離の測定方法。
【請求項8】
前記車間距離を算出するステップは、
前記第1フレーム内の第2車両の映像幅と、前記算出された平均ピクセル距離比率とを乗じて、前記第2フレーム内の第2車両の映像幅を算出するステップを含むことを特徴とする、請求項7に記載の車間距離の測定方法。
【請求項9】
前記車間距離を算出するステップは、
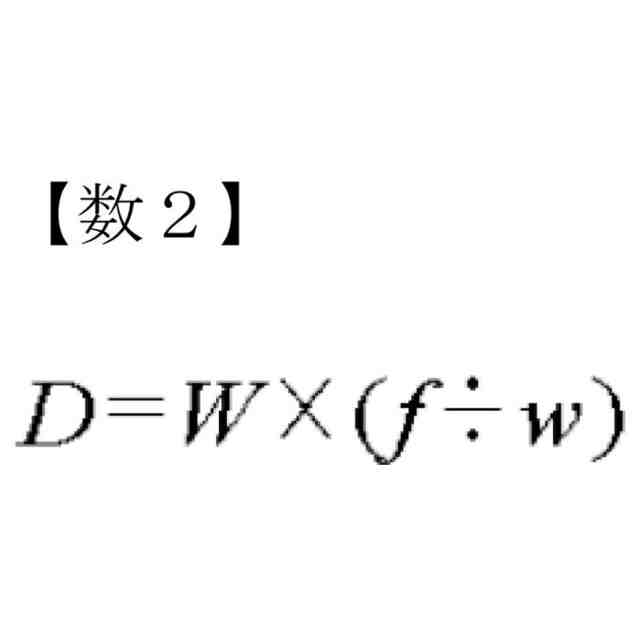
前記算出された第2フレーム内の第2車両の映像幅、第1撮影装置の焦点距離、及び前記第2車両の予測幅に基づいて、前記第1車両の撮影装置から前記第2車両までの車間距離を算出するステップをさらに含むことを特徴とする、請求項8に記載の車間距離の測定方法。
【請求項10】
前記車間距離を算出するステップは、
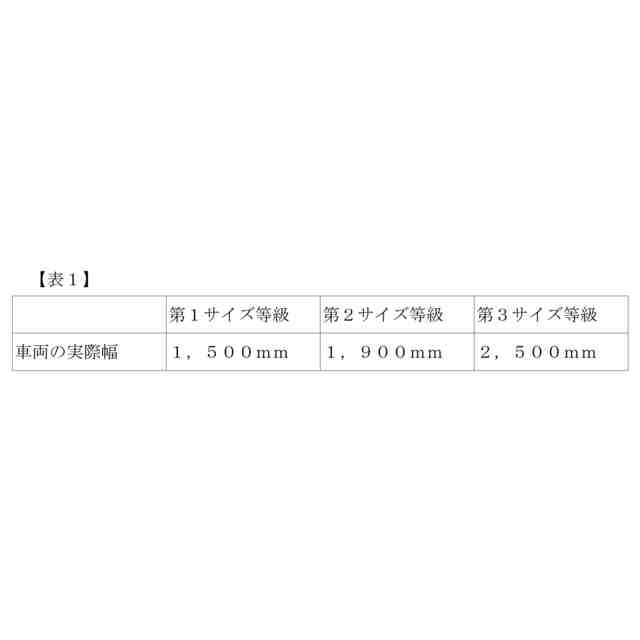
前記検出された第2車両の映像幅と、前記第2車両が位置した車路の映像幅との映像幅比率を算出するステップと、
前記算出された比率に基づいて前記第2車両のサイズ等級を決定するステップと、
前記決定された第2車両のサイズ等級に基づいて、前記第2車両の予測幅を算出するステップと、をさらに含むことを特徴とする、請求項9に記載の車間距離の測定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両映像に基づく車間距離の測定方法、車間距離測定装置、電子機器、コンピュータプログラム、及びコンピュータ読み取り可能な記録媒体に関する。より詳細には、近距離に位置する車両との距離を、車両映像の特徴点の追跡により測定する車間距離の測定方法、車間距離測定装置、電子機器、コンピュータプログラム、及びコンピュータ読み取り可能な記録媒体に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
車両の走行時に最も重要なことは安全な走行及び交通事故の予防であり、そのために、車両の姿勢制御、車両構成装置の機能制御などを行う種々の補助装置及び安全帯、エアバッグなどの安全装置が車両に装着されている。
【0003】
その上で、最近は、ブラックボックスなどのように、車両に位置して車両の走行映像及び各種センサから伝送されるデータを格納することで、車両の事故が発生した際に車両の事故原因を究明するための装置も車両に備えられる傾向にある。スマートフォン、タブレット型コンピュータなどの携帯用端末機も、ブラックボックスまたはナビゲーションアプリケーションなどが搭載可能であって、かかる車両用装置として活用されている状況である。
【0004】
そこで、近年、車両の走行中に撮影された走行映像を用いて車両運転者の運転を補助する先端運転支援システム(ADAS:Advanced Driver Assistance Systems)が開発及び普及され、安全な運転と運転者の便宜を図っている。
【0005】
かかるADASにより提供される機能の中でも、前方車両警報システム(FCWS:Forward Collision Warning System)機能は、撮影された走行映像から車両の走行経路における前方に位置した前方車両を検出し、検出された前方車両との距離を測定し、距離に応じて、衝突危険性があることを運転者に案内する機能である。
【0006】
すなわち、FCWSのためには前方車両の検出が必要であるが、従来は、前方車両の検出のために、撮影された走行映像中における前方車両の影を用いる映像処理方法、または数多くの車両のイメージを学習して検出するマシンラーニング(Machine Learning)方法などを用いていた。この2つの方法は両方とも、車両の下端部分を含む車両領域が走行映像中に存在する際に検出性能が高くなる。
【0007】
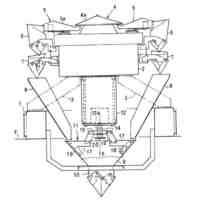
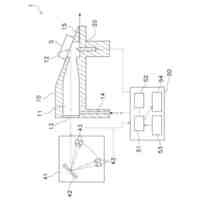
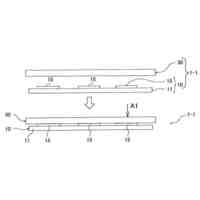
但し、車両は走行中に様々な走行環境に遭うことになり、走行映像中に車両の下端部分が含まれない状況も起こり得る。一例として、車両の走行中に前方車両を発見して走行速度が低くなる過程で、車両と前方車両との距離は非常に近くなる。図1のように、車両1と前方車両2との距離が遠い場合(2-1)、車両1により撮影された走行映像には、前方車両の下端部分を含む車両映像が走行映像に含まれる。但し、車両1と前方車両2との距離が近くなる場合(例えば、10m以内)(2-2)、前方車両の下端部分が走行映像に含まれなくなる。
【0008】
このように、車両の走行中に前方車両との距離が近くなり、前方車両の下端部分が走行映像に含まれない場合、従来のような影または学習に基づく前方車両の検出方法では、前方車両を十分に検出できないという問題があった。
【0009】
一方、このような車間距離測定技術は、最近活発に論議されている自律走行車の自律走行のための核心技術であり、自律走行中に前方車両を十分に検出できず、車間距離が測定できなかった場合、事故につながり得るため、車間距離測定技術の重要性は益々大きくなっている。
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は、上述の問題を解決するためになされたものであって、本発明の目的は、自車と、距離測定対象となる対象車両(前方車両または後方車両)との間の距離が近接するにつれて対象車両の下端部分が撮影されなくなり、走行映像を用いた対象車両の検出が不可能になっても、特徴点の追跡により対象車両を追跡することで、対象車両と自車との間の距離を測定する、車両映像に基づく車間距離の測定方法、車間距離測定装置、電子機器、コンピュータプログラム、及びコンピュータ読み取り可能な記録媒体を提供することにある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
計器装置
10日前
株式会社東光高岳
計器
6日前
株式会社ミツトヨ
測定器
3日前
日本精機株式会社
液面検出装置
12日前
大和製衡株式会社
組合せ秤
18日前
大和製衡株式会社
組合せ秤
12日前
大和製衡株式会社
組合せ秤
12日前
個人
フロートレス液面センサー
25日前
大同特殊鋼株式会社
疵検出方法
3日前
エグゼヴィータ株式会社
端末装置
4日前
日本特殊陶業株式会社
ガスセンサ
4日前
日本特殊陶業株式会社
ガスセンサ
4日前
ダイハツ工業株式会社
試験用治具
18日前
日本特殊陶業株式会社
ガスセンサ
13日前
日本特殊陶業株式会社
ガスセンサ
13日前
日本特殊陶業株式会社
ガスセンサ
24日前
タカノ株式会社
試料分析装置
3日前
富士電機株式会社
エンコーダ
5日前
バイオテック株式会社
容器設置装置
4日前
株式会社クボタ
作業車
17日前
富士電機株式会社
エンコーダ
5日前
柳井電機工業株式会社
部材検査装置
4日前
タカノ株式会社
試料分析装置
3日前
旭光電機株式会社
漏出検出装置
24日前
新電元メカトロニクス株式会社
位置検出装置
10日前
株式会社ノーリツ
通信システム
10日前
TDK株式会社
計測装置
11日前
JNC株式会社
トランジスタ型センサ
3日前
株式会社フジキン
流量測定装置
19日前
JNC株式会社
トランジスタ型センサ
3日前
トヨタ自動車株式会社
歯車の検査方法
13日前
ウシオ電機株式会社
光学測定装置
3日前
株式会社島津製作所
発光分析装置
10日前
日本電気株式会社
測位装置及びその方法
6日前
帝国通信工業株式会社
圧力センサ
4日前
ジャパンプローブ株式会社
超音波探触子
4日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ