TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101707
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2024080390
出願日
2024-05-16
発明の名称
船舶制御装置、船舶制御方法、及びプログラム
出願人
三菱重工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B63H
25/04 20060101AFI20250630BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】他船を追跡する際に適切に航路を設定することができる船舶制御装置、船舶制御方法、及びプログラムを提供すること。
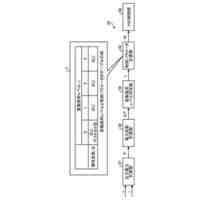
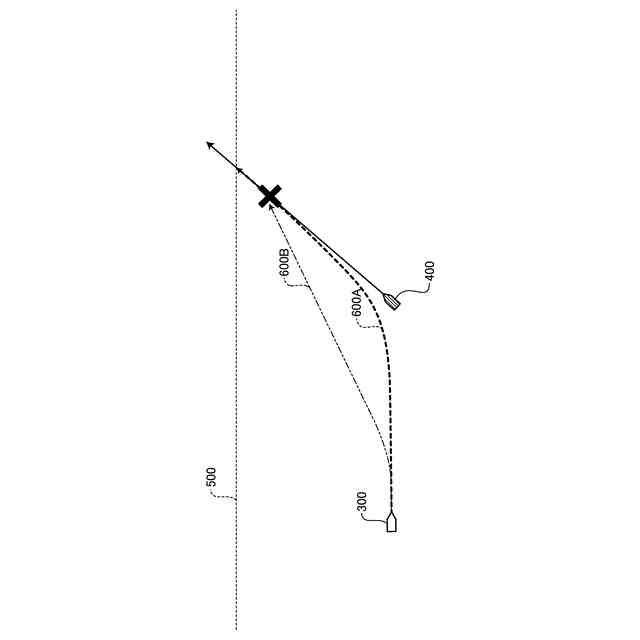
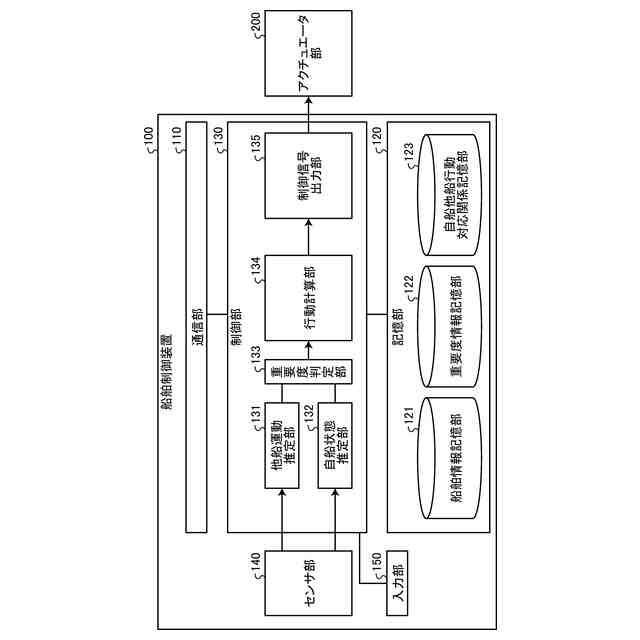
【解決手段】本開示に係る船舶制御装置は、他船の運動状態を示す他船運動状態を推定する他船運動推定部と、自船の運動状態を示す自船運動状態を推定する自船状態推定部と、他船運動状態と、自船運動状態と、に基づいて、自船の針路、速力、舵角を含む自船行動を計算する行動計算部と、自船行動に基づいて、自船を駆動するアクチュエータ部に与える制御信号を出力する制御信号出力部と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
他船の運動状態を示す他船運動状態を推定する他船運動推定部と、
自船の運動状態を示す自船運動状態を推定する自船状態推定部と、
前記他船運動状態と、前記自船運動状態と、に基づいて、自船の針路、速力、舵角を含む自船行動を計算する行動計算部と、
前記自船行動に基づいて、自船を駆動するアクチュエータ部に与える制御信号を出力する制御信号出力部と、を備える、
船舶制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記他船運動状態、及び前記自船運動状態に基づいて、他船の自船に対する重要度を判定する重要度判定部と、をさらに備え、
他船が複数存在する場合に、他船ごとに重要度を判定し、前記重要度に基づいて、自船に追跡をさせる他船を割り当てる、
請求項1に記載の船舶制御装置。
【請求項3】
前記行動計算部は、微分ゲームに基づき、他船が自船の追尾を逃れる行動の効果が最も小さくなるように、自船行動を決定する最小値最大値問題を解くことにより前記自船行動を計算する、
請求項1又は2に記載の船舶制御装置。
【請求項4】
前記行動計算部は、前記最小値最大値問題について、所定の条件を満たす複数の解を導出し、複数の前記自船行動を計算する、
請求項3に記載の船舶制御装置。
【請求項5】
前記行動計算部は、前記最小値最大値問題の解をオープンループ形式により、インダイレクト法、又はデコンポジション法を用いて導出する、
請求項3に記載の船舶制御装置。
【請求項6】
前記行動計算部は、前記最小値最大値問題の初期設定値を、サンプリングベースの経路計画手法を用いて算出した後に、当該の初期設定値を用いて、前記最小値最大値問題についてデコンボジション法を用いて解を導出する、
請求項5に記載の船舶制御装置。
【請求項7】
前記行動計算部は、前記最小値最大値問題の前記自船行動、及び他船行動の初期設定値について、自船、及び他船の二次元の位置と、針路と、を含む三次元空間内においてサンプリングベースの経路計画手法を用いて探索を行って、他船行動の初期設定値については、サンプリングによって設定し、他船の探索木についてサンプルリングした点と、自船の探索木内のノードと、を繋ぐことにより、前記自船行動の初期設定値を求める、
請求項6に記載の船舶制御装置。
【請求項8】
前記行動計算部は、サンプリングベースの経路計画手法を用いて、他船の探索木についてサンプルリングした点と、自船の探索木のノードと、を直線によって繋いで、他船の捕獲位置を求めた後に、
求めた他船の捕獲位置と、自船の初期位置と、を自船の方位に関する終端制約を緩和したパスによって結ぶことにより、自船行動、及び他船行動の初期設定値を求める、
請求項6に記載の船舶制御装置。
【請求項9】
前記行動計算部は、前記最小値最大値問題の解をクローズドループ形式により、レベルセット法を用いて導出する、
請求項3に記載の船舶制御装置。
【請求項10】
各種の情報を表示する表示部に、前記行動計算部が計算した前記自船行動に関する情報を表示させる表示制御部と、をさらに備え、
ユーザーから各種の操作情報を受け付ける入力部と、をさらに備え、
前記入力部は、ユーザーから前記表示部に表示された自船行動の選択を受け付け、
前記制御信号出力部は、ユーザーが選択した自船行動に基づいて、自船を駆動するアクチュエータ部に与える制御信号を出力する、
請求項4に記載の船舶制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、船舶制御装置、船舶制御方法、及びプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
艦艇などのモビリティ製品の自律化や運転支援に向けて、ある目的をもって移動するモビリティに対し、その目的を達成させないように、自船の行動を計画する技術に関するニーズがある。
【0003】
例えば、下記の特許文献1には、無人航走体に搭載されたソナーを用いた測量などで、無人航走体の管制、及び観測データ通信を円滑に行うために無人航走体を追尾する自動操船システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-123318号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記の特許文献1に記載の自動操船システムは、測量船が無人航走体の位置を把握し、無人航走体の管制、及び観測データの通信を行うのに適した位置に測量船を移動させることはできるものの、不審船などが領海へ侵入、又は領海から逃走することを阻止すべく追尾することはできなかった。
【0006】
本開示は上記課題を鑑み、他船を追跡する際に適切に航路を設定することができる船舶制御装置、船舶制御方法、及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本開示に係る船舶制御装置は、他船の運動状態を示す他船運動状態を推定する他船運動推定部と、自船の運動状態を示す自船運動状態を推定する自船状態推定部と、前記他船運動状態と、前記自船運動状態と、に基づいて、自船の針路、速力、舵角を含む自船行動を計算する行動計算部と、前記自船行動に基づいて、自船を駆動するアクチュエータ部に与える制御信号を出力する制御信号出力部と、を備える。
【0008】
上述した課題を解決し、目的を達成するために、本開示に係る船舶制御方法は、他船の運動状態を示す他船運動状態を推定するステップと、自船の運動状態を示す自船運動状態を推定するステップと、前記他船運動状態と、前記自船運動状態と、に基づいて、自船の針路、速力、舵角を含む自船行動を計算するステップと、前記自船行動に基づいて、自船を駆動するアクチュエータ部に与える制御信号を出力するステップと、を含む。
【0009】
上述した課題を解決し、目的を達成するために、本開示に係るプログラムは、他船の運動状態を示す他船運動状態を推定するステップと、自船の運動状態を示す自船運動状態を推定するステップと、前記他船運動状態と、前記自船運動状態と、に基づいて、自船の針路、速力、舵角を含む自船行動を計算するステップと、前記自船行動に基づいて、自船を駆動するアクチュエータ部に与える制御信号を出力するステップと、をコンピュータに実行させる。
【発明の効果】
【0010】
本開示によれば、他船を追跡する際に適切に航路を設定することができる船舶制御装置、船舶制御方法、及びプログラムを提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱重工業株式会社
リチウム脱離装置
5日前
三菱重工業株式会社
冷却装置及び冷却方法
3日前
三菱重工業株式会社
炭化炉及びその制御方法
3日前
三菱重工業株式会社
燃焼器及びガスタービン
5日前
三菱重工業株式会社
動翼、及び動翼の加工方法
5日前
三菱重工業株式会社
圧縮機及び圧縮機システム
6日前
三菱重工業株式会社
電力変換器及び電力システム
10日前
三菱重工業株式会社
回転電機用回転子及び回転電機
3日前
三菱重工業株式会社
電動機、及び電動機の製造方法
3日前
三菱重工業株式会社
信号処理装置及び信号処理方法
3日前
三菱重工業株式会社
ストッカ、及び細胞培養システム
3日前
三菱重工業株式会社
ストッカ、及び細胞培養システム
5日前
三菱重工業株式会社
殺菌用ユニット、細胞培養システム
4日前
三菱重工業株式会社
容器搬送治具及び細胞培養システム
5日前
三菱重工業株式会社
反応器、及びモノマー製造システム
11日前
三菱重工業株式会社
電力伝送装置および電力伝送システム
3日前
三菱重工業株式会社
管理装置、管理方法、およびプログラム
5日前
三菱重工業株式会社
計算方法、炉心解析装置及びプログラム
5日前
三菱重工業株式会社
ガス供給装置及びガス供給装置の起動方法
3日前
三菱重工業株式会社
計画システム、計画方法、およびプログラム
5日前
三菱重工業株式会社
管理装置、管理システム、およびプログラム
5日前
三菱重工業株式会社
保管ユニット、保管装置、細胞培養システム
10日前
三菱重工業株式会社
船舶制御装置、船舶制御方法、及びプログラム
6日前
三菱重工業株式会社
濃度測定装置、分離システム及び濃度測定方法
10日前
三菱重工業株式会社
回収システム、細胞培養システム及び回収方法
5日前
三菱重工業株式会社
クレーン装置、クレーンシステム及び制御方法
6日前
三菱重工業株式会社
モノマー製造システム、制御方法及びプログラム
11日前
三菱重工業株式会社
フィルタ装置、ろ過装置、及び細胞培養システム
3日前
三菱重工業株式会社
搬送システム、細胞培養システム、及び搬送方法
6日前
三菱重工業株式会社
交通量予測装置、交通量予測方法、及びプログラム
10日前
三菱重工業株式会社
ボトルトレイ、ボトルユニット及び細胞培養システム
4日前
三菱重工業株式会社
複合材構造体、作業機械及び複合材構造体の成形方法
4日前
三菱重工業株式会社
ワーク台座プレート、ワーク、及び細胞培養システム
4日前
三菱重工業株式会社
フラスコトレイ、フラスコユニット及び細胞培養システム
5日前
三菱重工業株式会社
電力伝送システム、部分放電検出方法および電力伝送装置
10日前
三菱重工業株式会社
ワーク保管システム、ワーク保管装置、ワーク、細胞培養システム
10日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ