TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025100578
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2025061740,2022500254
出願日
2025-04-03,2020-12-23
発明の名称
情報処理方法及び情報処理装置
出願人
パナソニックIPマネジメント株式会社
代理人
個人
,
個人
,
個人
主分類
G08G
1/00 20060101AFI20250626BHJP(信号)
要約
【課題】自律移動の性能を向上できる情報処理方法を提供する。
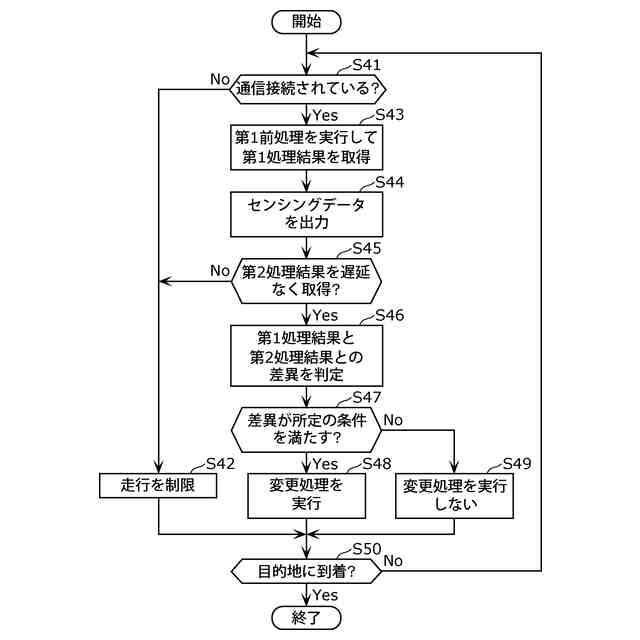
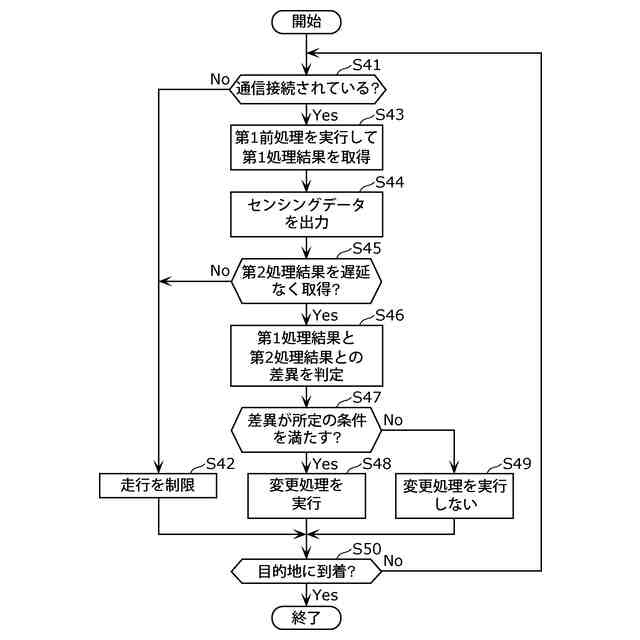
【解決手段】情報処理方法は、自律移動体の自律運転における走行制御処理の前処理である第1前処理を自律移動体が取得したセンシングデータに基づいて実行して第1処理結果を取得し、センシングデータを外部の装置へ出力し、センシングデータに基づいて第1前処理よりも高度な前処理である第2前処理を実行して得られる第2処理結果を外部の装置から取得し、自律移動体と外部の装置との間で通信遅延がある場合、又は、第2前処理に処理遅延がある場合、自律移動体の走行を制限し、自律移動体と外部の装置との間で通信遅延がない場合、又は、第2前処理に処理遅延がない場合、第1処理結果又は第3処理結果に基づいて、自律移動体の走行制御を行い、第3処理結果は、第2処理結果であり、又は、第1処理結果を補正して得られる処理結果である。
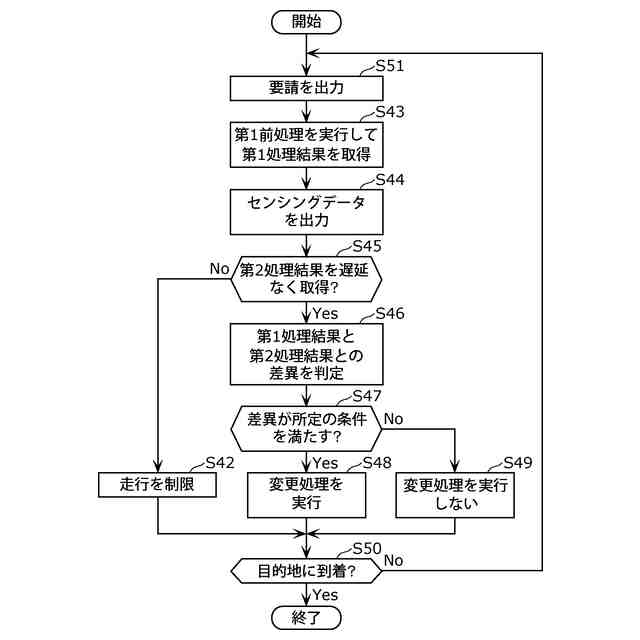
【選択図】図7
特許請求の範囲
【請求項1】
自律移動体に搭載される情報処理装置に実行させる情報処理方法であって、
前記自律移動体の自律運転における走行制御処理の前処理である第1前処理を前記自律移動体が取得したセンシングデータに基づいて実行して第1処理結果を取得し、
前記センシングデータを外部の装置へ出力し、
前記センシングデータに基づいて前記第1前処理よりも高度な前処理である第2前処理を実行して得られる第2処理結果を前記外部の装置から取得し、ここで、前記第2前処理は、ネットワークを介して前記自律移動体と接続され、前記情報処理装置より処理能力が高い前記外部の装置により実行され、
前記自律移動体と前記外部の装置との間で通信遅延がある場合、又は、前記第2前処理に処理遅延がある場合、前記自律移動体の走行を制限し、
前記自律移動体と前記外部の装置との間で通信遅延がない場合、又は、前記第2前処理に処理遅延がない場合、前記第1処理結果又は第3処理結果に基づいて、前記自律移動体の走行制御を行い、
前記第3処理結果は、前記第2処理結果であり、又は、前記第1処理結果を補正して得られる処理結果である
情報処理方法。
続きを表示(約 1,100 文字)
【請求項2】
前記第1処理結果を前記第3処理結果に変更する変更指示を受信した場合に、前記通信遅延により前記変更指示の受信が遅れたときには、受信した変更指示を無視して前記自律移動体の走行を制限する
請求項1に記載の情報処理方法。
【請求項3】
前記通信遅延により前記第2処理結果を遅延なく取得できなかった場合、前記自律移動体の走行を制限する
請求項1に記載の情報処理方法。
【請求項4】
前記通信遅延により前記第2処理結果を遅延なく取得できなかった場合、又は、前記第2前処理に処理遅延がある場合に、遅延に対する補正が可能なときには、前記第1処理結果又は前記第3処理結果に基づいて、前記自律移動体の走行制御を行う
請求項1に記載の情報処理方法。
【請求項5】
前記通信遅延により前記第2処理結果を遅延なく取得できなかった場合、又は、前記第2前処理に処理遅延がある場合に、遅延に対する補正が可能でないときに、所定のODD(Operational Design Domain)を満たすときには、前記第1処理結果に基づいて、前記自律移動体の走行制御を行い、前記所定のODDを満たさないときには、前記自律移動体の走行を制限する
請求項1に記載の情報処理方法。
【請求項6】
さらに、
前記自律移動体と前記外部の装置との間で通信遅延がない場合、又は、前記第2前処理に処理遅延がない場合、前記第1処理結果と前記第2処理結果との差異を判定し、
判定された前記差異にしたがって、前記第1処理結果を前記第3処理結果に変更し、前記第3処理結果に基づいて、前記自律移動体の走行制御を行う
請求項1に記載の情報処理方法。
【請求項7】
前記差異が所定の条件を満たす場合に、前記第1処理結果を前記第3処理結果に変更し、前記第3処理結果に基づいて、前記自律移動体の走行制御を行う
請求項6に記載の情報処理方法。
【請求項8】
前記差異が前記所定の条件を満たす場合に、所定のODDを満たすときには、前記第1処理結果を前記第3処理結果に変更し、前記第3処理結果に基づいて、前記自律移動体の走行制御を行い、前記所定のODDを満たさないときには、前記自律移動体の走行を制限する
請求項7に記載の情報処理方法。
【請求項9】
前記差異が所定の条件を満たす場合に、前記自律移動体の走行を制限する
請求項6に記載の情報処理方法。
【請求項10】
前記差異が所定の条件を満たす場合に、異常を通知する
請求項6に記載の情報処理方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自律移動体の自律移動に関する情報処理方法及び情報処理装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
自動運転車の自動運転システムについて、安全性向上のためにハードウェア又はソフトウェアの多重化を行うことが望まれている。例えば、特許文献1及び2では、自動運転車において、電源、検知機能及び制御機能等の系統を多重化することで安全性を向上させる手法が提案されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2018/154860号
特許第3881197号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、コスト、消費電力、及び空間等の観点から自動運転車等の自律移動体に搭載できるコンピュータには制限があり、自律移動体に搭載される自律移動システムの性能が低い場合がある。このため、上記特許文献1及び2に開示された手法では、自律移動体に搭載されたハードウェア又はソフトウェアの多重化により、自律移動の安全性は向上できても、自律移動の性能面では不十分となる場合がある。
【0005】
そこで、本開示は、自律移動の性能を向上できる情報処理方法等を提供する。
【課題を解決するための手段】
【0006】
本開示に係る情報処理方法は、自律移動体に搭載される情報処理装置に実行させる情報処理方法であって、前記自律移動体の自律運転における走行制御処理の前処理である第1前処理を前記自律移動体が取得したセンシングデータに基づいて実行して第1処理結果を取得し、前記センシングデータを外部の装置へ出力し、前記センシングデータに基づいて前記第1前処理よりも高度な前処理である第2前処理を実行して得られる第2処理結果を前記外部の装置から取得し、ここで、前記第2前処理は、ネットワークを介して前記自律移動体と接続され、前記情報処理装置より処理能力が高い前記外部の装置により実行され、前記自律移動体と前記外部の装置との間で通信遅延がある場合、又は、前記第2前処理に処理遅延がある場合、前記自律移動体の走行を制限し、前記自律移動体と前記外部の装置との間で通信遅延がない場合、又は、前記第2前処理に処理遅延がない場合、前記第1処理結果又は第3処理結果に基づいて、前記自律移動体の走行制御を行い、前記第3処理結果は、前記第2処理結果であり、又は、前記第1処理結果を補正して得られる処理結果である。
【0007】
なお、これらの包括的又は具体的な態様は、システム、方法、集積回路、コンピュータプログラム又はコンピュータ読み取り可能なCD-ROMなどの記録媒体で実現されてもよく、システム、方法、集積回路、コンピュータプログラム及び記録媒体の任意な組み合わせで実現されてもよい。
【発明の効果】
【0008】
本開示の一態様に係る情報処理方法等によれば、自律移動の性能を向上できる。
【図面の簡単な説明】
【0009】
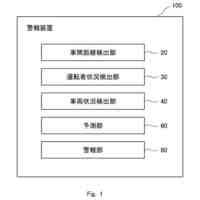
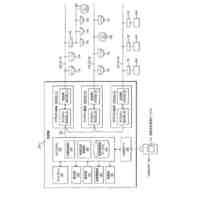
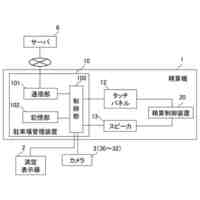
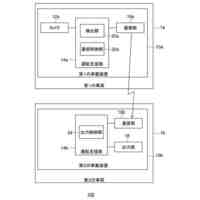
図1は、実施の形態1に係る自動運転車及び遠隔自動運転サーバの一例を示すブロック図である。
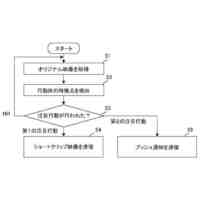
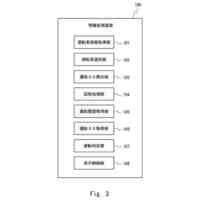
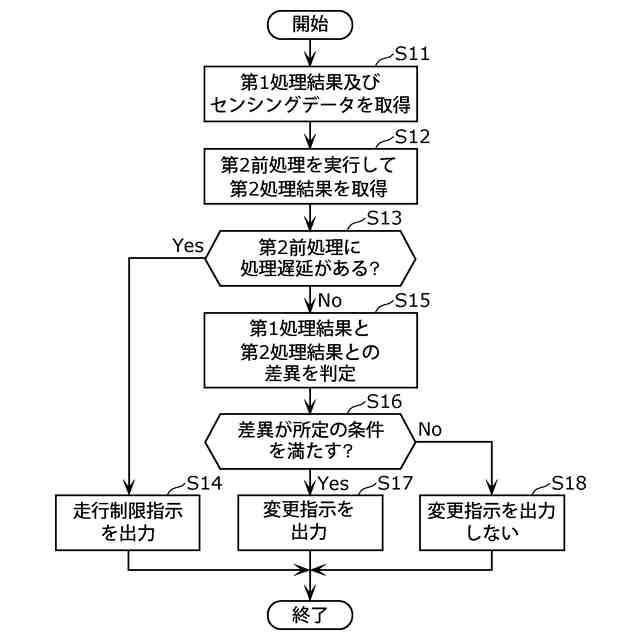
図2は、実施の形態1に係る情報処理方法の一例を示すフローチャートである。
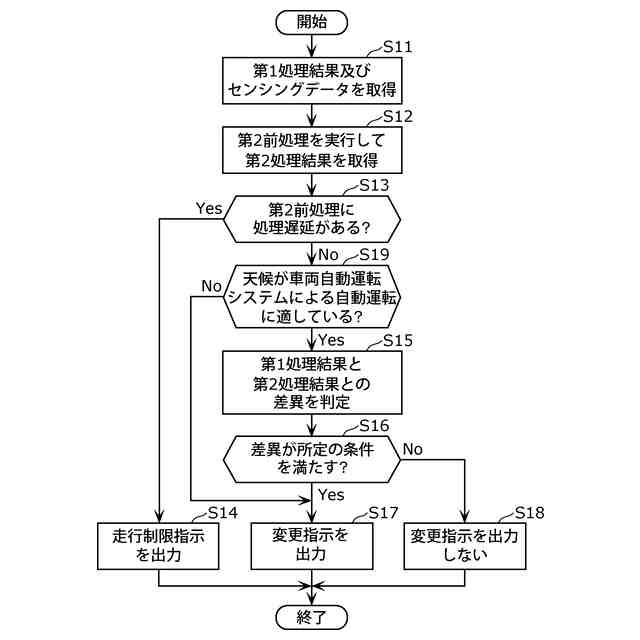
図3は、実施の形態1に係る情報処理方法の他の一例を示すフローチャートである。
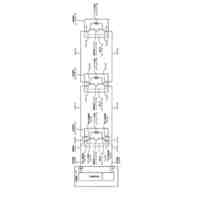
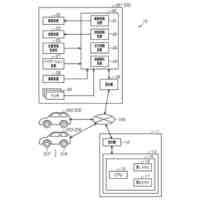
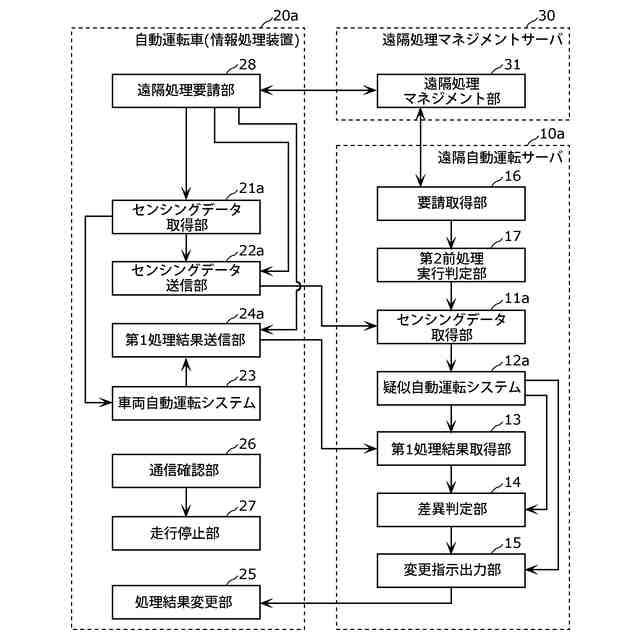
図4は、実施の形態1の変形例に係る自動運転車、遠隔自動運転サーバ及び遠隔処理マネジメントサーバの一例を示すブロック図である。
図5は、実施の形態1の変形例に係る情報処理方法の一例を示すフローチャートである。
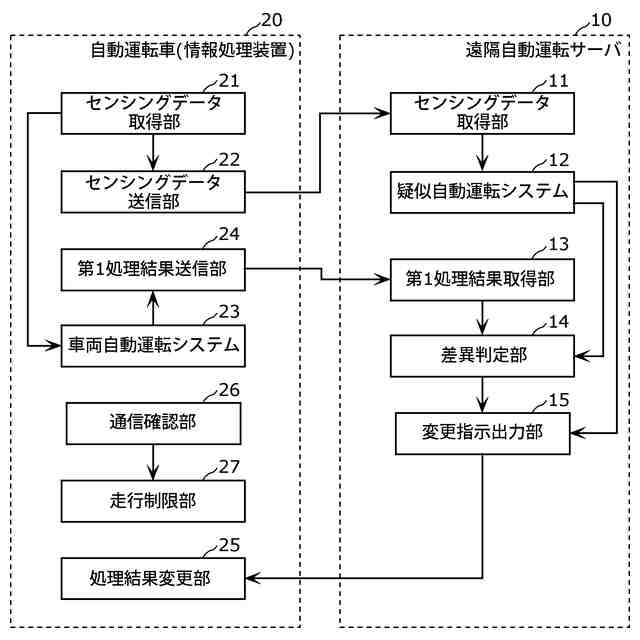
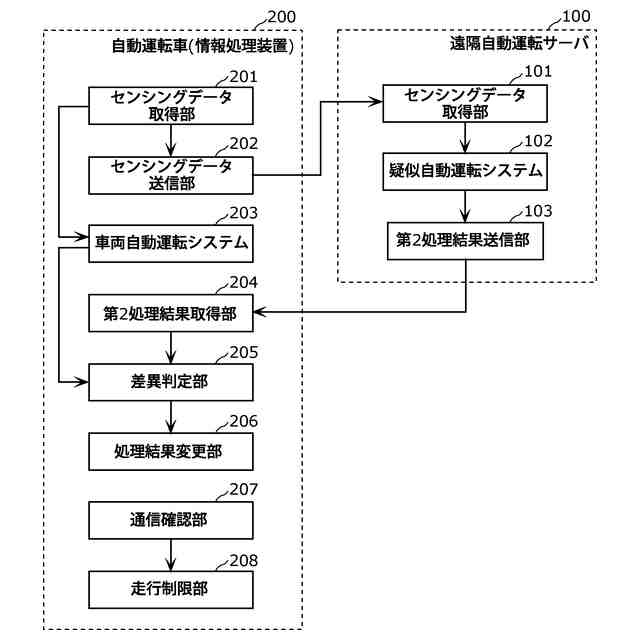
図6は、実施の形態2に係る自動運転車及び遠隔自動運転サーバの一例を示すブロック図である。
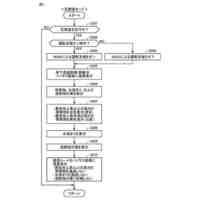
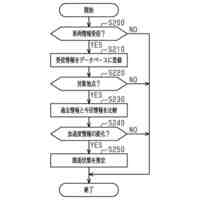
図7は、実施の形態2に係る自動運転車の動作の一例を示すフローチャートである。
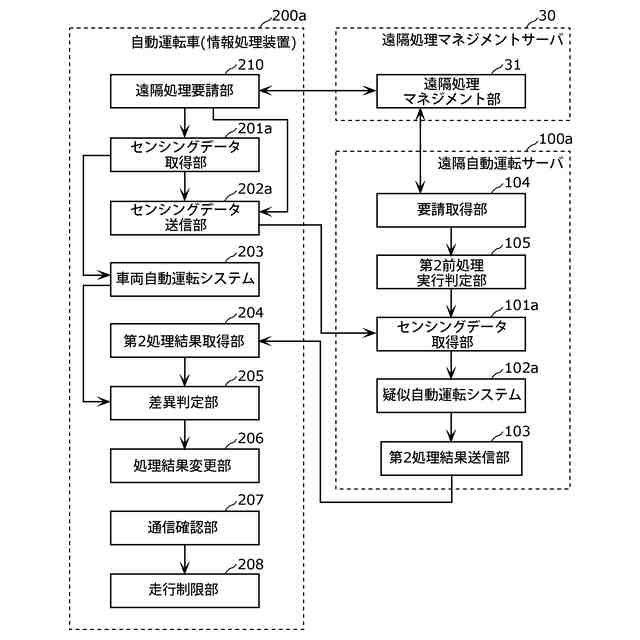
図8は、実施の形態2の変形例に係る自動運転車、遠隔自動運転サーバ及び遠隔処理マネジメントサーバの一例を示すブロック図である。
図9は、実施の形態2の変形例に係る自動運転車の動作の一例を示すフローチャートである。
図10は、各実施の形態に共通する変形例に係る情報処理方法の一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
本開示の一態様に係る情報処理方法は、コンピュータに実行させる情報処理方法であって、自律移動体の自律移動処理における走行制御処理の前処理である第1前処理の結果である第1処理結果及び前記自律移動体が取得したセンシングデータを前記自律移動体から取得し、前記センシングデータに基づいて前記第1前処理よりも高度な前処理である第2前処理を実行して第2処理結果を取得し、前記第1処理結果と前記第2処理結果との差異を判定し、判定された前記差異にしたがって、前記第1処理結果を第3処理結果に変更させる変更指示を前記自律移動体に出力し、前記第3処理結果は前記第1処理結果又は前記第2処理結果の少なくとも一方に基づいて得られる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
路面投影装置
6日前
ニッタン株式会社
発信機
1か月前
個人
防犯に特化したアプリケーション
14日前
ニッタン株式会社
発信機
1日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
12日前
東京都公立大学法人
液滴検出装置
14日前
TOA株式会社
拡声放送システム
5日前
株式会社JVCケンウッド
警報装置
今日
株式会社アジラ
データ転送システム
5日前
アズビル株式会社
建物管理システム
1か月前
ホーチキ株式会社
異常報知設備
1か月前
ホーチキ株式会社
異常報知設備
1か月前
個人
磁気・光学誘導路線による車両の運行制御
2か月前
株式会社JVCケンウッド
情報処理装置
27日前
トヨタ自動車株式会社
配車システム
2か月前
ホーチキ株式会社
非常通報システム
1か月前
株式会社フィットネスワン
見守りシステム
1か月前
株式会社豊田自動織機
制御システム
5日前
ホーチキ株式会社
火災検出システム
今日
Adora株式会社
アプリ使用制御システム
1か月前
ユニティガードシステム株式会社
警備監視システム
1か月前
トヨタ自動車株式会社
障害物検知装置
21日前
個人
注意喚起システム及び注意喚起装置
5日前
大和ハウス工業株式会社
住環境管理設備
今日
能美防災株式会社
火災感知器窓部清掃システム
19日前
シャープ株式会社
駐車場管理装置
1か月前
株式会社アドヴィックス
走行支援システム
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
運転支援装置
今日
トヨタ自動車株式会社
運転支援装置
1か月前
トヨタ自動車株式会社
情報処理装置
12日前
トヨタ自動車株式会社
路面状態の推定方法
5日前
株式会社エイビット
工事観測システム
1か月前
株式会社JVCケンウッド
運転支援装置及び運転支援方法
20日前
株式会社アイシン
重畳画像表示装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ