TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025099080
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023215455
出願日
2023-12-21
発明の名称
移動体制御システム
出願人
京セラドキュメントソリューションズ株式会社
代理人
個人
主分類
G05D
1/242 20240101AFI20250626BHJP(制御;調整)
要約
【課題】 撮影画像内のマーカーの位置を正確に特定して移動体をマーカーに沿って正確に走行させる移動体制御システムを得る。
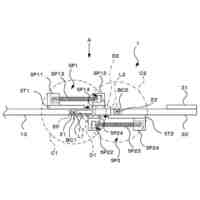
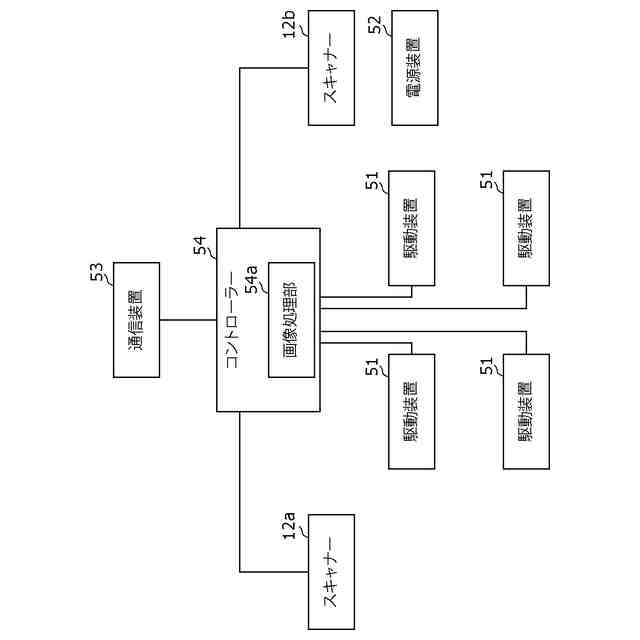
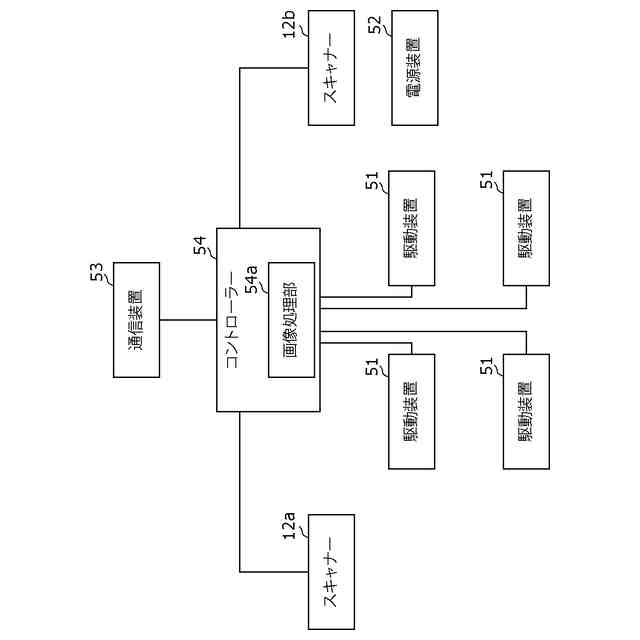
【解決手段】 移動体1において、スキャナー12a,12bは、床面を光学的にスキャンして床面画像を生成し、コントローラー54は、移動体1がマーカーに沿って走行するように駆動装置51を制御する。そして、画像処理部54aは、(a)床面とマーカーとの間の濃度差を拡大するガンマ補正を床面画像に対して実行し、(b)所定の閾値に基づいて、ガンマ補正後の床面画像におけるマーカーの位置を特定し、コントローラー54は、特定されたマーカーの位置に基づいて、移動体1がマーカーに沿って走行するように駆動装置51を制御する。
【選択図】 図5
特許請求の範囲
【請求項1】
マーカーが設定された床面上を前記マーカーに沿って走行するように移動体を制御する移動体制御システムにおいて、
前記移動体の走行用の駆動力を発生する駆動装置と、
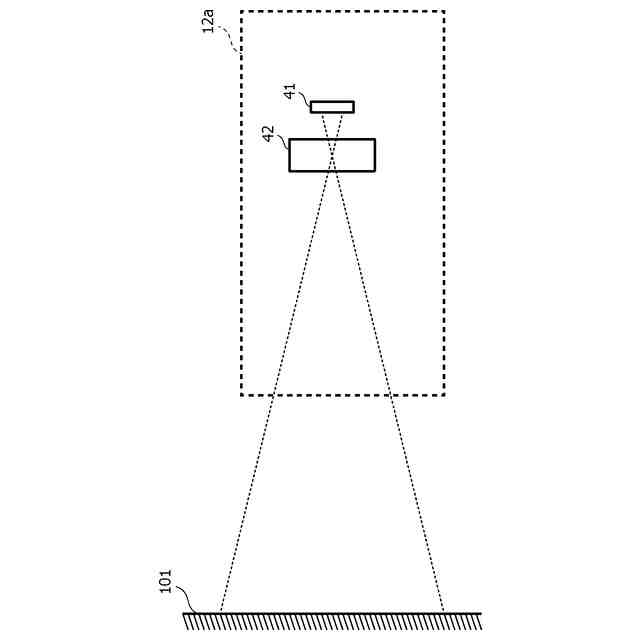
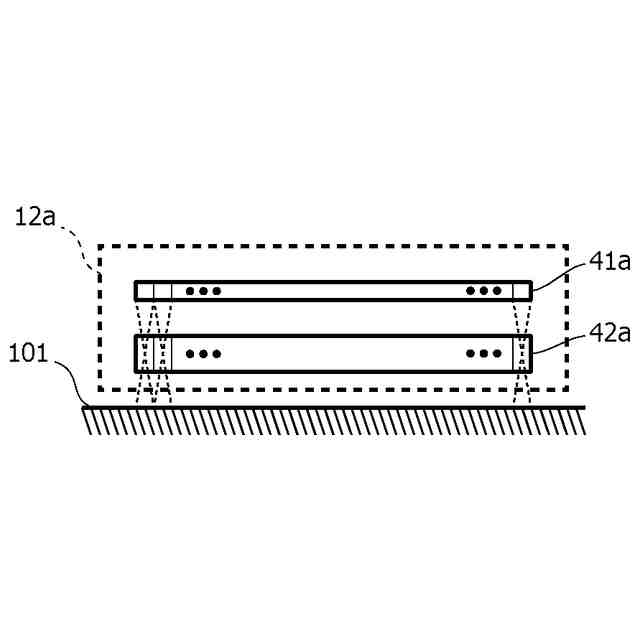
前記床面を光学的にスキャンして床面画像を生成するスキャナーと、
前記床面画像における前記マーカーの位置を特定する画像処理部と、
前記移動体が前記マーカーに沿って走行するように前記駆動装置を制御するコントローラーとを備え、
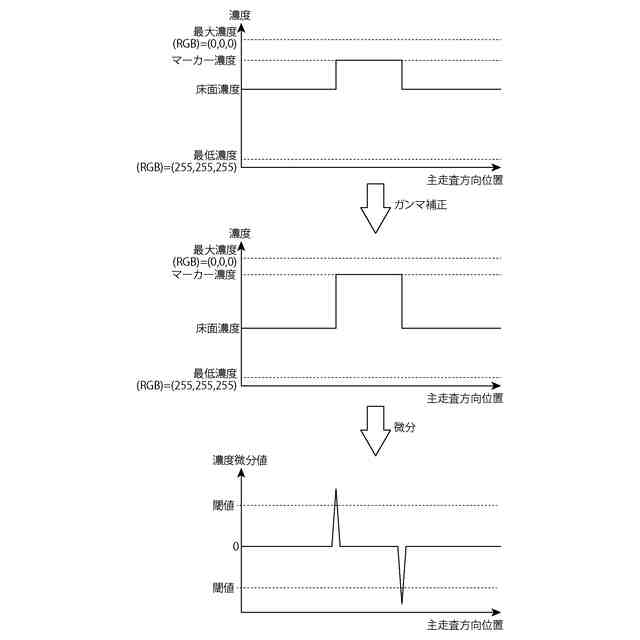
前記画像処理部は、(a)前記床面と前記マーカーとの間の濃度差を拡大するガンマ補正を前記床面画像に対して実行し、(b)所定の閾値に基づいて、前記ガンマ補正後の前記床面画像における前記マーカーの位置を特定し、
前記コントローラーは、特定された前記マーカーの位置に基づいて、前記移動体が前記マーカーに沿って走行するように前記駆動装置を制御すること、
を特徴とする移動体制御システム。
続きを表示(約 370 文字)
【請求項2】
前記閾値は、判別分析法によって設定されることを特徴とする請求項1記載の移動体制御システム。
【請求項3】
前記床面の各位置に対して前記閾値が予め設定されており、
前記画像処理部は、(a)前記移動体の現在位置に対応する前記閾値を特定し、(b)特定した前記閾値に基づいて、前記ガンマ補正後の前記床面画像における前記マーカーの位置を特定すること、
を特徴とする請求項1記載の移動体制御システム。
【請求項4】
前記画像処理部は、(a)ガンマ補正後の前記床面画像の微分画像を生成し、(b)前記微分画像と前記閾値とを比較して前記ガンマ補正後の前記床面画像における前記マーカーの位置を特定することを特徴とする請求項1から請求項3のうちのいずれか1項記載の移動体制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体制御システムに関するものである。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
ある自動走行装置は、走行案内線を含む走行面を撮像して画像を取得し、取得した画像内の走行案内線に沿って走行する(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2017-111552号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述のように、床面に線状のマーカーを設けて移動体の経路が指定される場合、移動体が走行する床面の状態に応じて撮影画像における床面濃度が異なるため、撮影画像内のマーカーの位置が正確に特定されない可能性がある。
【0005】
本発明は、上記の問題に鑑みてなされたものであり、撮影画像内のマーカーの位置を正確に特定して移動体をマーカーに沿って正確に走行させる移動体制御システムを得ることを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る移動体制御システムは、マーカーが設定された床面上を前記マーカーに沿って走行するように移動体を制御する移動体制御システムであって、前記移動体の走行用の駆動力を発生する駆動装置と、前記床面を光学的にスキャンして床面画像を生成するスキャナーと、前記床面画像における前記マーカーの位置を特定する画像処理部と、前記移動体が前記マーカーに沿って走行するように前記駆動装置を制御するコントローラーとを備える。そして、前記画像処理部は、(a)前記床面と前記マーカーとの間の濃度差を拡大するガンマ補正を前記床面画像に対して実行し、(b)所定の閾値に基づいて、前記ガンマ補正後の前記床面画像における前記マーカーの位置を特定し、前記コントローラーは、特定された前記マーカーの位置に基づいて、前記移動体が前記マーカーに沿って走行するように前記駆動装置を制御する。
【発明の効果】
【0007】
本発明によれば、撮影画像内のマーカーの位置を正確に特定して移動体をマーカーに沿って正確に走行させる移動体制御システムが得られる。
【0008】
本発明の上記又は他の目的、特徴および優位性は、添付の図面とともに以下の詳細な説明から更に明らかになる。
【図面の簡単な説明】
【0009】
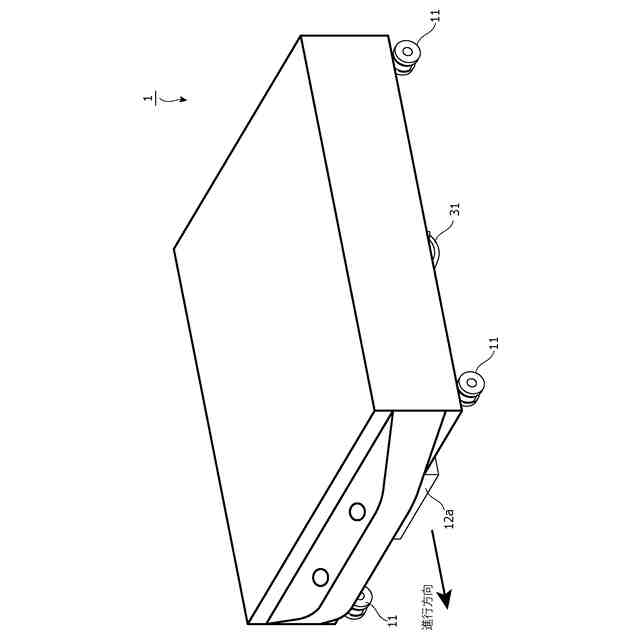
図1は、実施の形態1に係る移動体制御システムを搭載した移動体の一例を示す斜視図である。
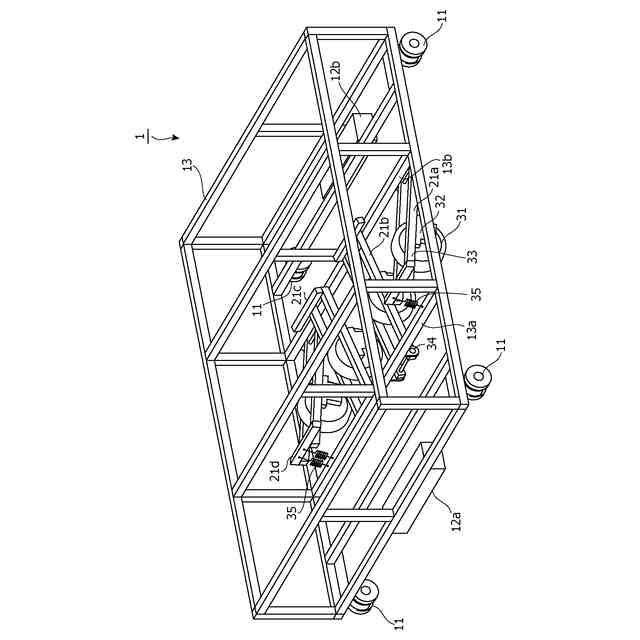
図2は、図1に示す移動体の機械的な構成を示す斜視図である。
図3は、実施の形態1に係る移動体におけるスキャナーの構成を示す図である。
図4は、実施の形態1に係る移動体におけるスキャナーの他の構成を示す図である。
図5は、図1に示す移動体1の電気的な構成を示す斜視図である。
図6は、床面の一例を示す図である。
図7は、図5における画像処理部54aにおける画像処理について説明する図である。
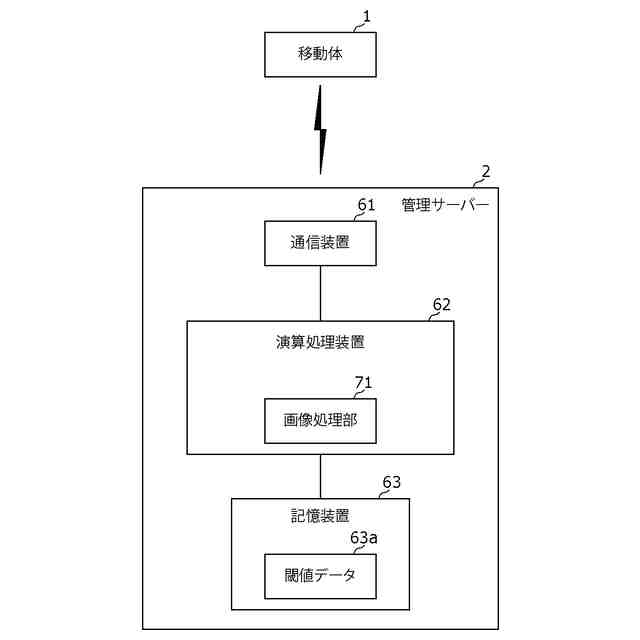
図8は、実施の形態2に係る移動体制御システムの構成を示すブロック図である。
【発明を実施するための形態】
【0010】
以下、図に基づいて本発明の実施の形態を説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
24日前
個人
作業車両自動化システム
5日前
ローム株式会社
半導体集積回路
2か月前
愛知製鋼株式会社
目標軌跡の設定方法
13日前
株式会社ダイフク
搬送設備
3日前
三栄ハイテックス株式会社
基準電圧回路
2か月前
トヨタ自動車株式会社
ペダル機構
2か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
生産管理システム
10日前
トヨタ自動車株式会社
減圧弁
7日前
株式会社鷺宮製作所
制御装置
1か月前
株式会社オプトン
制御プログラム生成装置
1か月前
三菱電機株式会社
自己位置推定装置
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
マーク ヘイリー
消防ロボット
17日前
株式会社テイエルブイ
減圧弁の制御装置
19日前
アズビル株式会社
制御システムおよび制御方法
13日前
株式会社タブチ
減圧弁
3か月前
アズビル株式会社
制御システムおよび制御方法
13日前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
WHILL株式会社
電動モビリティ
2か月前
オムロン株式会社
安全装置
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
株式会社計数技研
移動体、及びプログラム
2か月前
三菱電機株式会社
電源回路
1か月前
個人
ペダル装置、及びペダル装置を具備する自動車
28日前
ミツミ電機株式会社
電源回路および駆動回路
13日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ