TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025098362
公報種別
公開特許公報(A)
公開日
2025-07-02
出願番号
2023214447
出願日
2023-12-20
発明の名称
搬送装置、搬送方法、及び搬送制御プログラム
出願人
株式会社東芝
代理人
弁理士法人スズエ国際特許事務所
主分類
B65H
1/14 20060101AFI20250625BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
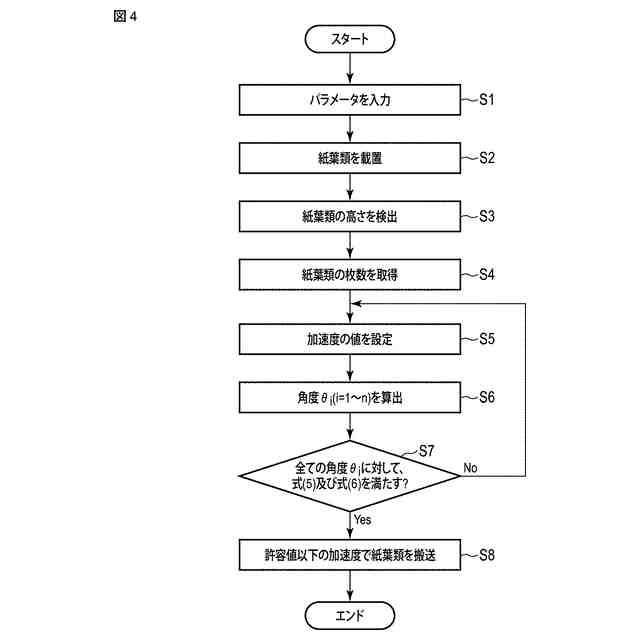
【課題】加速度の許容値を算出し、積層された紙葉類の荷崩れを抑制できる搬送装置、搬送方法、及び搬送制御プログラムを提供する。
【解決手段】積層された複数枚の紙葉類が載置される載置面を有し、前記複数枚の紙葉類を搬送する搬送機構と、前記複数枚の紙葉類の枚数を検出する枚数検出部と、前記複数枚の紙葉類の摩擦係数を記憶する記憶部とを有し、前記搬送機構の駆動を制御するコントローラと、を備え、F
(i-1)i
/N
(i-1)i
≦μの式と、x
i
≧0の式と、を満たす前記複数枚の紙葉類を搬送する際の加速度の許容値を算出し、前記許容値以下の加速度で前記搬送機構を駆動する、搬送装置。
【選択図】図4
特許請求の範囲
【請求項1】
積層された複数枚の紙葉類が載置される載置面を有し、前記複数枚の紙葉類を搬送する搬送機構と、
前記複数枚の紙葉類の枚数を検出する枚数検出部と、前記複数枚の紙葉類の摩擦係数を記憶する記憶部とを有し、前記搬送機構の駆動を制御するコントローラと、を備え、
前記複数枚の紙葉類が載置面に積層された状態において、
F
(i-1)i
:下からi+1枚目の紙葉類の下面に作用する力であって、前記下面に沿った方向の力、
N
(i-1)i
:前記下面に作用する力であって、前記下面に直交する方向の力、
μ:1枚の前記紙葉類の摩擦係数、
x
i
:前記下面の搬送方向における一端から力N
(i-1)i
の作用点までの距離、
とした場合に、
前記コントローラは、前記複数枚の紙葉類の全てに対して、
F
(i-1)i
/N
(i-1)i
≦μの式と、x
i
≧0の式と、を満たす前記複数枚の紙葉類を搬送する際の加速度の許容値を算出し、前記許容値以下の加速度で前記搬送機構を駆動する、
搬送装置。
続きを表示(約 1,800 文字)
【請求項2】
前記載置面に積層された前記複数枚の紙葉類の高さを検出する高さセンサをさらに備え、
前記コントローラは、前記記憶部に1枚の前記紙葉類の厚さを記憶し、前記高さ及び前記厚さに基づいて、前記枚数検出部で前記複数枚の紙葉類の枚数を算出する、
請求項1に記載の搬送装置。
【請求項3】
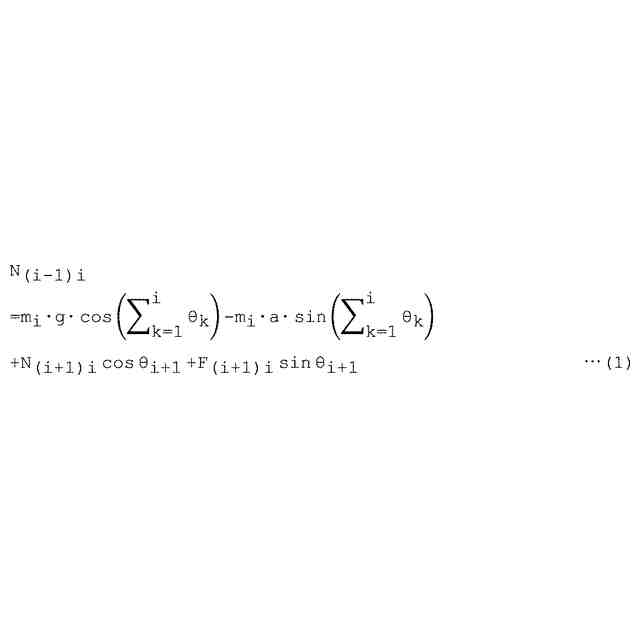
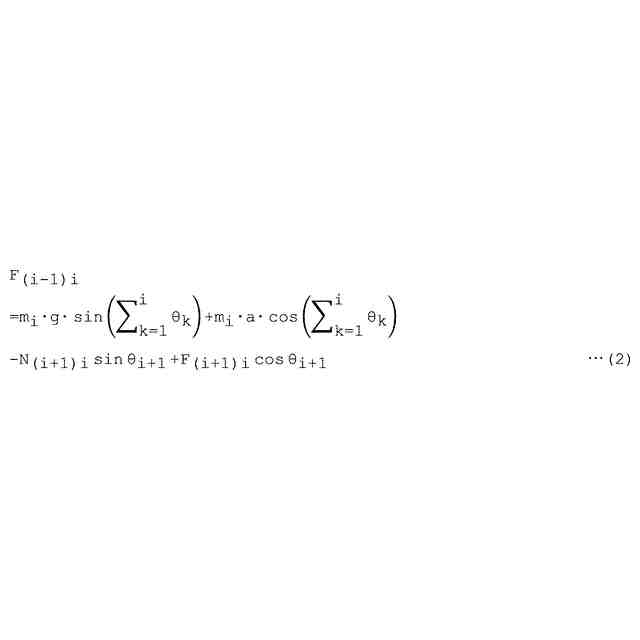
前記コントローラは、1枚の前記紙葉類の厚さ、長さ、及び質量を前記記憶部に記憶し、前記厚さ、前記長さ、及び前記質量に基づいて、力F
(i-1)i
及び力N
(i-1)i
を算出する、
請求項1に記載の搬送装置。
【請求項4】
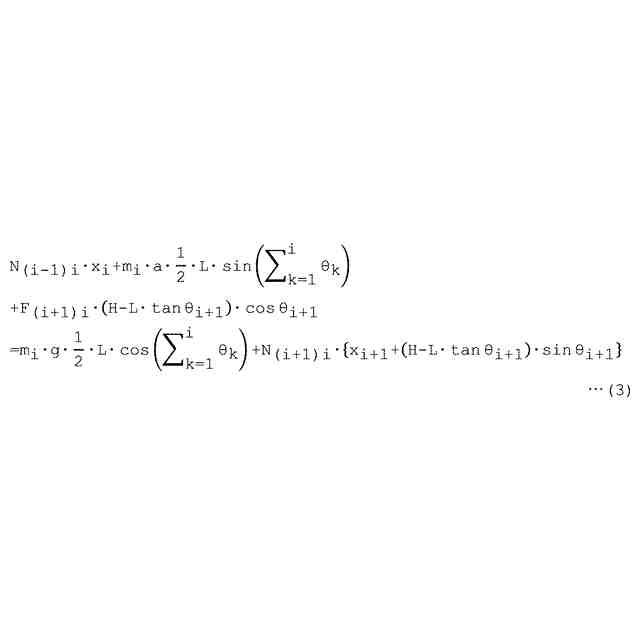
N
(i+1)i
:下からi+1枚目の紙葉類の上面に作用する力であって、前記上面に直交する方向の力、
X
i+1
:前記上面の搬送方向における一端から力N
(i+1)i
の作用点までの距離、
θ
i+1
:前記上面の前記下面に対する角度、
L:1枚の前記紙葉類の搬送方向における長さ、
K:係数
とした場合に、
前記コントローラは、
TIFF
2025098362000008.tif
12
99
の式に基づいて、力F
(i-1)i
及び力N
(i-1)i
を算出する、
請求項3に記載の搬送装置。
【請求項5】
前記記憶部に前記摩擦係数、前記厚さ、前記長さ、及び前記質量を記憶するコマンドを前記コントローラに出力可能な操作部をさらに備え、
前記コントローラは、前記コマンドが入力された場合に、前記摩擦係数、前記厚さ、前記長さ、及び前記質量を前記記憶部に記憶する、
請求項3に記載の搬送装置。
【請求項6】
積層された複数枚の紙葉類が載置される載置面を有し、前記複数枚の紙葉類を搬送する搬送機構を備える搬送装置を用いる紙葉類の搬送方法であって、
前記複数枚の紙葉類の枚数を検出し、
前記複数枚の紙葉類が載置面に積層された状態において、
F
(i-1)i
:下からi+1枚目の紙葉類の下面に作用する力であって、前記下面に沿った方向の力、
N
(i-1)i
:前記下面に作用する力であって、前記下面に直交する方向の力、
μ:1枚の前記紙葉類の摩擦係数、
x
i
:前記下面の搬送方向における一端から力N
(i-1)i
の作用点までの距離、
とした場合に、
前記複数枚の紙葉類の全てに対して、
F
(i-1)i
/N
(i-1)i
≦μの式と、x
i
≧0の式と、を満たす前記複数枚の紙葉類を搬送する際の加速度の許容値を算出し、前記許容値以下の加速度で前記搬送機構を駆動する、紙葉類の搬送方法。
【請求項7】
積層された複数枚の紙葉類が載置される載置面を有し、前記複数枚の紙葉類を搬送する搬送機構を備える搬送装置のコンピュータによって実行される搬送制御プログラムであって、
前記コンピュータに、
前記複数枚の紙葉類の枚数を検出する第1手順と、
前記複数枚の紙葉類が載置面に積層された状態において、
F
(i-1)i
:下からi+1枚目の紙葉類の下面に作用する力であって、前記下面に沿った方向の力、
N
(i-1)i
:前記下面に作用する力であって、前記下面に直交する方向の力、
μ:1枚の前記紙葉類の摩擦係数、
x
i
:前記下面の搬送方向における一端から力N
(i-1)i
の作用点までの距離、
とした場合に、
前記複数枚の紙葉類の全てに対して、
F
(i-1)i
/N
(i-1)i
≦μの式と、x
i
≧0の式と、を満たす前記複数枚の紙葉類を搬送する際の加速度の許容値を算出する第2手順と、
前記許容値以下の加速度で前記搬送機構を駆動する第3手順と、
を実行させるための搬送制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、搬送装置、搬送方法、及び搬送制御プログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
紙葉類処理装置は、取出し部に投入された複数枚の紙葉類を1枚ずつ取出し、取出した紙葉類を処理する。取出し部に紙葉類を投入する方法としては、結束されていない状態で積層された紙葉類をコンベヤのような搬送機構で搬送し、取出し部に投入する方法がある。上述した方法で紙葉類を搬送する場合、積層枚数が多くなるほど、積層された紙葉類の荷崩れが発生する可能性が高くなる。
【先行技術文献】
【特許文献】
【0003】
特許第5330519号公報
特許第4127708号公報
特開2009-227399号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本実施形態の課題は、積層された紙葉類の荷崩れを抑制できる搬送装置、搬送方法、及び搬送制御プログラムを提供することにある。
【課題を解決するための手段】
【0005】
一実施形態に係る搬送装置は、積層された複数枚の紙葉類が載置される載置面を有し、前記複数枚の紙葉類を搬送する搬送機構と、前記複数枚の紙葉類の枚数を検出する枚数検出部と、前記複数枚の紙葉類の摩擦係数を記憶する記憶部とを有し、前記搬送機構の駆動を制御するコントローラと、を備え、
前記複数枚の紙葉類が載置面に積層された状態において、F
(i-1)i
:下からi+1枚目の紙葉類の下面に作用する力であって、前記下面に沿った方向の力、N
(i-1)i
:前記下面に作用する力であって、前記下面に直交する方向の力、μ:1枚の前記紙葉類の摩擦係数、x
i
:前記下面の搬送方向における一端から力N
(i-1)i
の作用点までの距離、とした場合に、
前記コントローラは、前記複数枚の紙葉類の全てに対して、F
(i-1)i
/N
(i-1)i
≦μの式と、x
i
≧0の式と、を満たす前記複数枚の紙葉類を搬送する際の加速度の許容値を算出し、前記許容値以下の加速度で前記搬送機構を駆動する。
【図面の簡単な説明】
【0006】
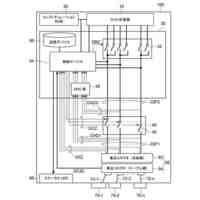
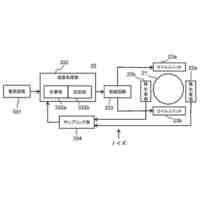
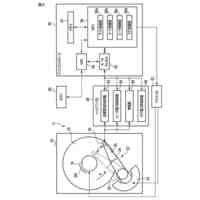
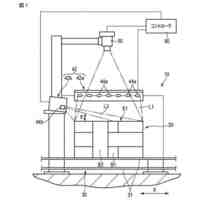
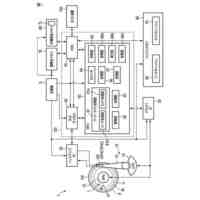
図1は、一実施形態に係る搬送装置の構成の一例を示す概略図である。
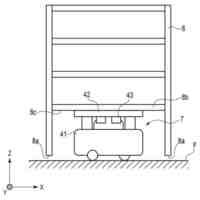
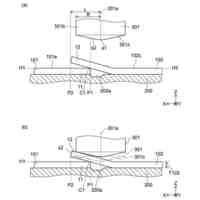
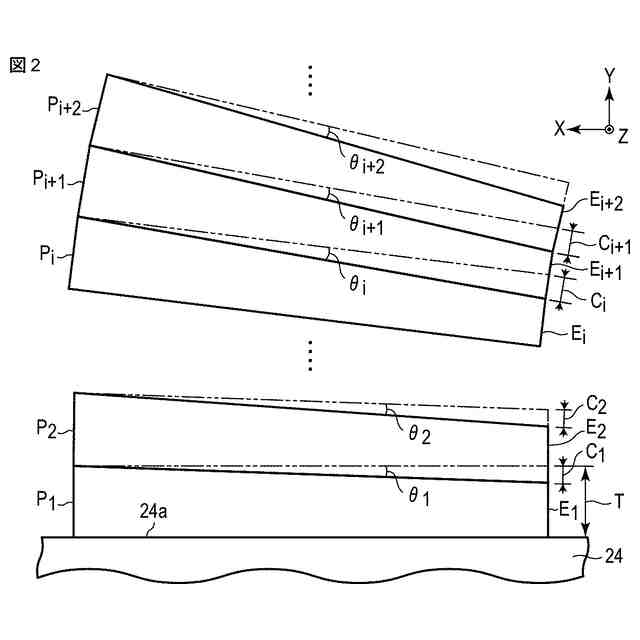
図2は、積層された紙葉類の一部を示す正面図であり、積層された紙葉類が加速度を有して搬送されている状態を示す図である。
図3は、図2の下からi+1枚目の紙葉類Pを示す図である。
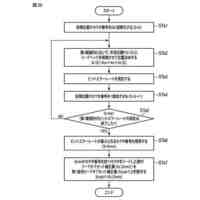
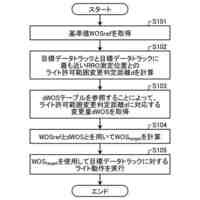
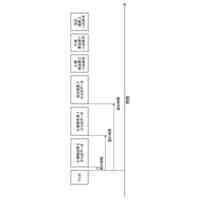
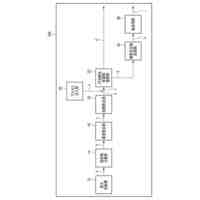
図4は、上記実施形態に係る搬送装置で紙葉類を搬送する際に実施される処理の手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0007】
以下に、本発明の実施形態について、図面を参照しつつ説明する。なお、開示はあくまで一例にすぎず、当業者において、発明の趣旨を保っての適宣変更について容易に想到し得るものについては、当然に本発明の範囲に含有されるものである。また、図面や説明をより明確にするため、実際の様態に比べ、各部の幅、厚さ、形状等について模式的に表される場合があるが、あくまで一例であって、本発明の解釈を限定するものではない。また、本明細書と各図において、既出の図に関して前述したものと同様の要素には、同一の符号を付して、詳細な説明を適宣省略することがある。
以下、図面を参照しながら一実施形態に係る搬送装置について詳細に説明する。
【0008】
まず、一実施形態に係る搬送装置20の構成について説明する。
図1は、一実施形態に係る搬送装置20の構成の一例を示す概略図である。なお、図1は、紙葉類処理装置10も併せて示している。まず、図1に示す第1方向X、第2方向Y、及び第3方向Zについて定義する。第1方向Xは、紙葉類Pが搬送される搬送方向である。第2方向Yは、紙葉類Pが積層される積層方向である。第3方向Zは、第1方向X及び第2方向Yに直交する方向である。
【0009】
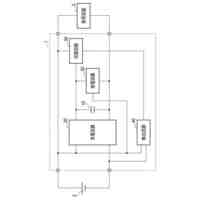
図1に示すように、搬送装置20は、搬送機構22と、高さセンサ30と、コントローラ32と、操作部40と、を備えている。搬送機構22は、搬送ベルト24と、一対の回転軸26a,26bと、アクチュエータ28と、を有している。搬送ベルト24は、第1方向Xに延在して形成された無端状のベルトであり、紙葉類Pを載置可能な載置面24aが外面に設けられている。
【0010】
一対の回転軸26a,26bは、第3方向Zに延在して形成され、搬送ベルト24の内側に位置し、第1方向Xにおいて離間して設けられている。搬送ベルト24は、一対の回転軸26a,26bに巻き付けて設けられ、回転軸26a,26bと同期して回転する。
アクチュエータ28は、回転軸26aと接続されており、回転軸26aを駆動することができる。一例において、アクチュエータ28は、回転軸26aを回転可能なモータである。アクチュエータ28によって回転軸26aが駆動されると、載置面24a上に積層された紙葉類Pは、第1方向Xに搬送される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
1か月前
株式会社東芝
電子機器
13日前
株式会社東芝
回転電機
19日前
株式会社東芝
配線治具
5日前
株式会社東芝
判定装置
14日前
株式会社東芝
制御装置
1か月前
株式会社東芝
搬送装置
13日前
株式会社東芝
立て看板
1か月前
株式会社東芝
遮断装置
12日前
株式会社東芝
半導体装置
18日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
電磁流量計
7日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
19日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
アンテナ装置
11日前
株式会社東芝
スイッチギヤ
1か月前
株式会社東芝
操作盤カバー
11日前
株式会社東芝
区分システム
1か月前
株式会社東芝
ディスク装置
7日前
株式会社東芝
アイソレータ
26日前
株式会社東芝
計算機システム
7日前
株式会社東芝
紙葉類処理装置
25日前
株式会社東芝
バックアップ回路
25日前
株式会社東芝
磁気ディスク装置
13日前
株式会社東芝
物品区分システム
27日前
株式会社東芝
磁気ディスク装置
11日前
株式会社東芝
磁気ディスク装置
11日前
株式会社東芝
磁気ディスク装置
11日前
株式会社東芝
X線厚み測定装置
1か月前
株式会社東芝
磁気ディスク装置
1か月前
株式会社東芝
有機物分解システム
1か月前
株式会社東芝
固定子および回転電機
28日前
株式会社東芝
接合方法及び接合装置
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ