TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025097223
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2023213391
出願日
2023-12-18
発明の名称
三次元計測方法、三次元計測装置、および三次元計測システム
出願人
株式会社日立製作所
代理人
青稜弁理士法人
主分類
G01B
11/25 20060101AFI20250623BHJP(測定;試験)
要約
【課題】
特徴的な模様や形状が少ない物体を対象としても、効果的な特徴点の抽出を可能にすることで、高精度な三次元計測ができること。
【課題を解決するための手段】
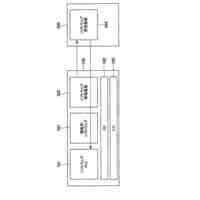
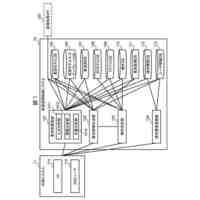
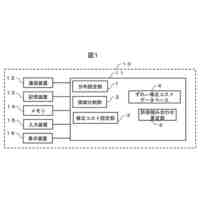
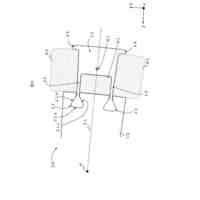
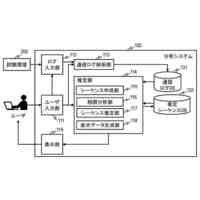
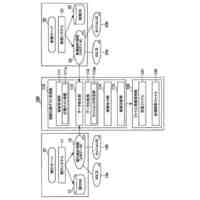
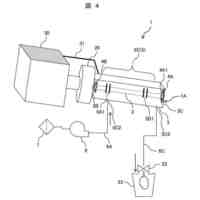
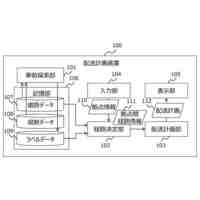
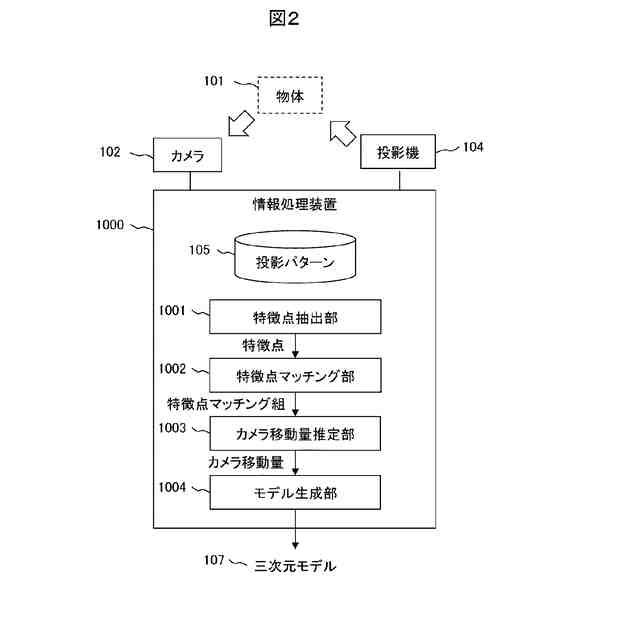
移動しながら物体を撮影するカメラと、前記物体に対して投影パターンを投影する投影機と、前記カメラから画像を受け取り前記投影機に投影指令を行う情報処理装置を含み、前記情報処理装置は、前記カメラが移動する前後で撮影した前記投影パターンを含む2枚の画像から、前記画像内の特徴点を抽出する特徴点抽出部と、同一地点を示す前記特徴点の組を探索して特徴点マッチング組を計算する特徴点マッチング部と、前記特徴点マッチング組から前記カメラの移動量を推定する移動量推定部と、前記カメラの移動量から前記物体の三次元モデルを生成するモデル生成部を含む、三次元計測システムである。
【選択図】図2
特許請求の範囲
【請求項1】
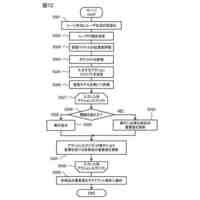
物体に対して投影パターンを投射する投影ステップ、
移動するカメラにより前記物体の画像を少なくとも2枚撮影する撮影ステップ、
前記2枚の画像を情報処理装置に入力し、該情報処理装置によって、前記2枚の画像から特徴点を抽出する特徴点抽出ステップ、
前記情報処理装置によって、同一地点を示す前記特徴点の組を探索して特徴点マッチング組を計算する特徴点マッチングステップ、
前記情報処理装置によって、前記特徴点マッチング組から前記カメラの移動量を推定する移動量推定部ステップ、
前記情報処理装置によって、前記カメラの移動量から前記物体の三次元モデルを生成するモデル生成ステップ、
を実行する三次元計測方法。
続きを表示(約 1,100 文字)
【請求項2】
前記2枚の画像には、前記投影パターンの中の同一パターンが少なくとも一つ含まれる、
請求項1記載の三次元計測方法。
【請求項3】
前記情報処理装置は、
前記特徴点抽出ステップで抽出される前記特徴点の数に基づいて、前記投影パターンを投射するか否かを判断すること、および、前記特徴点マッチングステップで探索される前記特徴点マッチング組の数に基づいて、前記投影パターンを投射するか否かを判断すること、の少なくとも一つを実行する、
請求項1記載の三次元計測方法。
【請求項4】
前記情報処理装置は、
前記特徴点抽出ステップで抽出される前記特徴点の数に基づいて、前記投影パターンの種類を切り替えるか否かを判断すること、前記特徴点マッチングステップで探索される前記特徴点マッチング組の数に基づいて、前記投影パターンの種類を切り替えるか否かを判断すること、および、前記画像に基づいて、前記投影パターンの種類を切り替えるか否かを判断すること、の少なくとも一つを実行する、
請求項1記載の三次元計測方法。
【請求項5】
前記投影パターンは、投影されたパターンの特徴点の間隔が5mmから660mmの間である、
請求項1記載の三次元計測方法。
【請求項6】
前記投影パターンは、少なくとも曲線と交点を含む文字および記号の少なくとも一つである、
請求項1記載の三次元計測方法。
【請求項7】
投影された前記文字または前記記号の縦および横の長さが60mmから330mmの間である、
請求項6記載の三次元計測方法。
【請求項8】
前記投影パターンは、前記カメラの移動方向を示すガイドを含む、
請求項1記載の三次元計測方法。
【請求項9】
投影パターンが投射された物体を、移動するカメラにより撮影した、少なくとも2枚の画像を入力とする三次元計測装置であって、
特徴点抽出部と、特徴点マッチング部と、カメラ移動量推定部と、モデル生成部を備え、
前記特徴点抽出部は、前記2枚の画像から特徴点を抽出し、
前記特徴点マッチング部は、同一地点を示す前記特徴点の組を探索して特徴点マッチング組を計算し、
前記カメラ移動量推定部は、前記特徴点マッチング組から前記カメラの移動量を推定し、
前記モデル生成部は、前記カメラの移動量から前記物体の三次元モデルを生成する、
三次元計測装置。
【請求項10】
入力される前記2枚の画像には、前記投影パターンの中の同一のパターンが含まれている、
請求項9記載の三次元計測装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、三次元計測技術に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
プラント建設、ビル建設、車両製造などにおいては、施工図面を施工現場に反映するために、現場で高精度に位置合わせすることが重要となる。例えばプラント建設においては、壁を貫通する配管を設置する施工が行われる。一般的な施工手順では、まず壁に穴を空けて貫通配管を設置してから、その先の直管を設置する。この工期を短縮するためには、壁に穴をあける前に壁の両側の直管をあらかじめ設置しておき、最後に壁に穴を空けて貫通配管を設置する施工手順の実現が求められる。そのためには、壁の反対側との高精度な位置合わせが要求される。
【0003】
そこで、光学カメラや赤外線カメラやToFセンサやLiDARなどの視覚センサ(以下、カメラと表現することもある)を移動しながら物体をスキャンし、カメラの移動量を逐次推定し、最終的に三次元物体の三次元モデルを生成する三次元計測が有効である。壁に穴をあける前に、壁の反対側までプラント内を移動しながらスキャンし、移動経路の全体を三次元モデル化することで、壁の反対側との位置合わせが実現できる。
【0004】
しかし、スキャン中の撮影視野内に特徴的な模様や形状が無い場合、特徴的な点(以下、特徴点や、ランドマークと表現することもある)を抽出できないため、カメラ移動量の推定ができず、スキャンが失敗することがある。特に、プラント施工中には壁や床面が一様な養生シート等で覆われていることがあり、壁や床面に特徴が無いことが多い。その結果、スキャンに失敗する可能性が高くなる。
【0005】
この点に関し、特許文献1では、同時位置推定地図構築(SLAM)を処理する移動型システムのナビゲーションにおいて、視覚センサで得られた情報から、視覚的類似性によりランドマークをランキングし、最良のランドマーク候補を選択するアルゴリズムが開示されている。
【先行技術文献】
【特許文献】
【0006】
特開2014-222550号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来技術では、壁や床面に特徴が少ない場合、効果的な特徴点を抽出できない。例えば特許文献1では、ランキングによって最良のランドマークを選択したとしても、効果的な特徴点を得ることはできない。効果的な特徴点が抽出できない場合、カメラ移動量の推定計算において誤差が増大するため、高精度な三次元計測が困難となる。
【0008】
以上のことから本発明の目的は、特徴的な模様や形状が少ない物体を対象としても、効果的な特徴点の抽出を可能にすることで、高精度な三次元計測ができる三次元計測システムを提供するものである。
【課題を解決するための手段】
【0009】
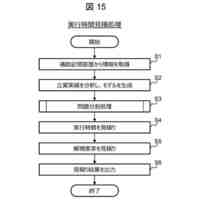
本発明の一側面は、物体に対して投影パターンを投射する投影ステップ、移動するカメラにより前記物体の画像を少なくとも2枚撮影する撮影ステップ、前記2枚の画像を情報処理装置に入力し、該情報処理装置によって、前記2枚の画像から特徴点を抽出する特徴点抽出ステップ、前記情報処理装置によって、同一地点を示す前記特徴点の組を探索して特徴点マッチング組を計算する特徴点マッチングステップ、前記情報処理装置によって、前記特徴点マッチング組から前記カメラの移動量を推定する移動量推定部ステップ、前記情報処理装置によって、前記カメラの移動量から前記物体の三次元モデルを生成するモデル生成ステップ、を実行する三次元計測方法である。
【0010】
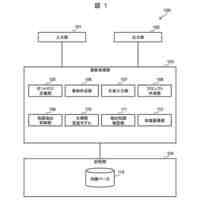
本発明の他の一側面は、投影パターンが投射された物体を、移動するカメラにより撮影した、少なくとも2枚の画像を入力とする三次元計測装置であって、特徴点抽出部と、特徴点マッチング部と、カメラ移動量推定部と、モデル生成部を備え、前記特徴点抽出部は、前記2枚の画像から特徴点を抽出し、前記特徴点マッチング部は、同一地点を示す前記特徴点の組を探索して特徴点マッチング組を計算し、前記カメラ移動量推定部は、前記特徴点マッチング組から前記カメラの移動量を推定し、前記モデル生成部は、前記カメラの移動量から前記物体の三次元モデルを生成する、三次元計測装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
軌条車両
1か月前
株式会社日立製作所
制御基板
1日前
株式会社日立製作所
回転電機
14日前
株式会社日立製作所
軌条車両
1か月前
株式会社日立製作所
電力変換器
1か月前
株式会社日立製作所
エレベーター
8日前
株式会社日立製作所
電力変換装置
1か月前
株式会社日立製作所
電力変換装置
1か月前
株式会社日立製作所
情報処理装置
1か月前
株式会社日立製作所
コントローラー
22日前
株式会社日立製作所
候補生成システム
1か月前
株式会社日立製作所
動作指令生成装置
1か月前
株式会社日立製作所
制御方法、演算装置
1か月前
株式会社日立製作所
製造工程管理システム
1か月前
株式会社日立製作所
対策計画作成支援装置
1か月前
株式会社日立製作所
回転子および回転電機
24日前
株式会社日立製作所
調速機及びエレベーター
29日前
株式会社日立製作所
巻上機及びエレベーター
1日前
株式会社日立製作所
垂直離着陸機用エアポート
1か月前
株式会社日立製作所
認可システム及び認可方法
1か月前
株式会社日立製作所
乗りかご及びエレベーター
1か月前
株式会社日立製作所
分析システム及び分析方法
8日前
株式会社日立製作所
現新比較テスト支援システム
今日
株式会社日立製作所
エレベーター及び保護カバー
6日前
株式会社日立製作所
知識抽出装置及び知識抽出方法
1か月前
株式会社日立製作所
情報処理装置及び情報処理方法
1か月前
株式会社日立製作所
情報提供装置及び情報提供方法
24日前
株式会社日立製作所
接点浄化装置及び風力発電装置
今日
株式会社日立製作所
生産計画立案支援装置及び方法
24日前
株式会社日立製作所
めっき装置及びめっき形成方法
14日前
株式会社日立製作所
釣合いおもり及びエレベーター
2日前
株式会社日立製作所
経路探索方法及び配送計画装置
1か月前
株式会社日立製作所
プリント配線基板、電力変換装置
1か月前
株式会社日立製作所
埋設物検出装置、埋設物検出方法
1か月前
株式会社日立製作所
営業支援装置、及び営業支援方法
1か月前
株式会社日立製作所
窒化処理部品およびその製造方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ